M3plus_OperationManual_j - 第73页
3- 8 3 3. 基板情報を作る Q: 部品先取り 通常は「しない」に設定します。 「する」に設定した場合、前基板の作業完了後、次基板が搬送されると同時に部品の吸着および認 識を始めるようになります。タクトタイムの短縮につながります。 V: コンベア X 軸速度 コンベア X 軸の動作により実装した部品が動いたりする場合に、ここでコンベア X 軸の速度を変 更できます。 X: コンベアモーター…
3-7
3
3. 基板情報を作る
I: 予定アンローダー枚数
アンローダーの 1 ラックに収納できる枚数を指定します。設定枚数の生産が終わると、アンロー
ダがラックを交換するまで、生産基板の搬出を中断します。「0」を入力した場合、基板の枚数が
アンローダーの最大容量枚数になっても連続して生産を行います。次の条件を満たす場合は「0」
を入力してください。
・ラック切替信号を出すアンローダーを使用している。
・リフロー直前のマシンでこのデータを使う。
J: 基板固定方法
生産基板に合わせて、適切な固定方法を選択してください。
・「外形基準」
基板を外側から固定します。
・「ロケートピン」 (オプション)
ロケートピンのみで基板を固定します。この固定方法はオプションです。
・「ピンプッシュアップ」 (オプション)
ロケートピンとプッシュアップピンの両方で基板を固定します。
K: 固定開始タイマー
基板がメインストッパーの手前に配置された基板検出センサー上を通過した直後に、マシンは基
板固定動作を開始します。基板サイズやコンベア速度によって、固定を開始する最適なタイミン
グが異なります。このパラメータにより、固定を開始するタイミングを遅らせることが可能です。
0.0 ∼ 1.9 秒の数値を入力してください。
L: 搬送開始高さ
実装終了後、コンベア出口への基板搬送はプッシュアップユニット下降後に開始されます。すで
に基板裏面に部品が組み付けられている場合は、プッシュアップユニットが十分下降してからで
ないと部品とユニットが干渉する恐れがあります。このパラメータにより基板種類ごとにプッ
シュアップユニットの下降高さを指定できます。基板固定時のプッシュアップユニットの高さを
0mm として、そこから何 mm 下降させるかを 3 ∼ 30mm の数値で入力してください。
M: コンベア空転タイマー
生産基板の形状が通常であれば「0 秒」に設定します。
生産基板が特殊な形状(切り欠き、中抜けなど)のため、コンベア出口センサーが基板搬出を誤
認識することがあります。この場合、コンベア空転タイマを設定すると、基板検出センサーが
OFF した後もさらにコンベアをタイマ分だけ回転させて基板搬出を完了できます。0.0 ∼ 9.9 秒
の数値を入力してください。
N: 画像処理補正
「補正通常」に設定します。「補正通常」に設定することで部品吸着時の画像認識チェックを行い
ます。
O: 負圧確認
「する」に設定します。「する」に設定することで部品を吸着しているかなどのチェックを、ビ
ジョン認識と負圧確認の両方で行います。
P: リトライ方式
実装中に吸着、認識エラーが発生する場合のリトライ方法を選択します。
・「グループ」
1 実装グループ終了するまでリトライを継続します。ヘッドの入れ替えはできません。
・「ブロック」
エラーが発生した場合、1 ブロック終了後にエラーしたヘッドでリトライします。
・「自動」
エラーが発生した場合、1 ブロック終了後にエラーしたヘッドにかかわらず空いているヘッド
でリトライします。
3-8
3
3. 基板情報を作る
Q: 部品先取り
通常は「しない」に設定します。
「する」に設定した場合、前基板の作業完了後、次基板が搬送されると同時に部品の吸着および認
識を始めるようになります。タクトタイムの短縮につながります。
V: コンベア X 軸速度
コンベア X 軸の動作により実装した部品が動いたりする場合に、ここでコンベア X 軸の速度を変
更できます。
X: コンベアモーター速度 (%)
コンベアモーター(基板搬送)速度を設定します。マシン設定に設定されているデータを標準とし
て+側に 50%、−側に 90% まで 10% 単位で設定できます。
3-9
3
3. 基板情報を作る
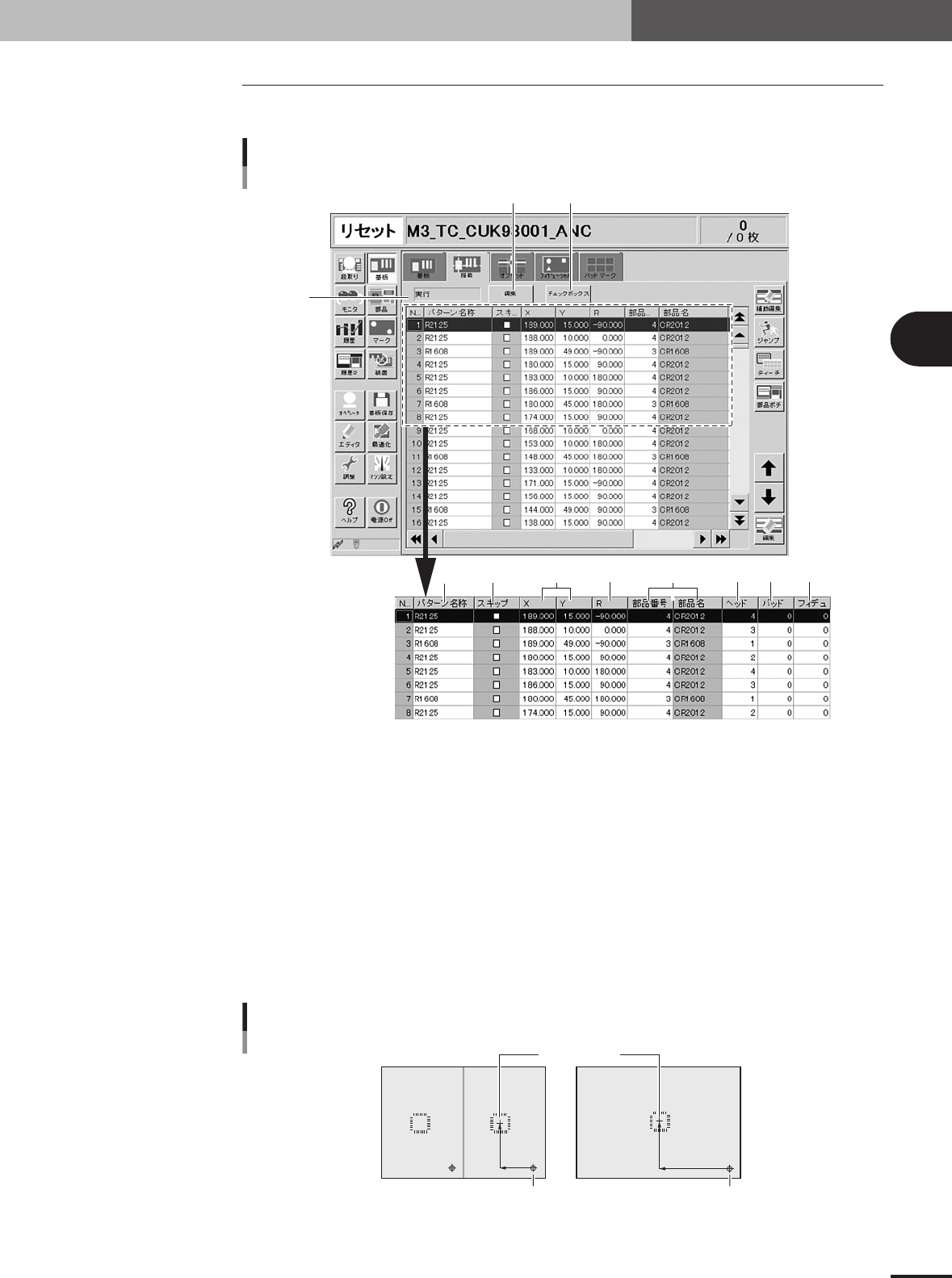
3.2 搭載パラメーター
搭載パラメーターでは、搭載位置や搭載する部品番号など、搭載に関するデータを設定します。
1
10 11
32 45 7 8 96
搭載パラメーター画面
26407-E5-10
1 実行 / スキップ
基板への部品搭載を実行するかしないかの設定が表示されます。変更するときは、[編集]ボタンを
押してください。「スキップ」に設定するとパス運転を行います。
2 パターン名称
基板上にプリントされている回路名称(例えば R23,U12 など)を入力します。
3 スキップ
この搭載データを実行しない場合は、チェックマークを付けます。
4 X, Y
1 枚基板の場合は基板原点から、割基板の場合は基準ブロックから搭載中心位置までの座標デー
タを入力します。ティーチング入力する場合は下図を参考にしてください。
搭載中心位置
第2ブロック 第1ブロック
基板原点と搭載中心位置
基板原点
ブロックリピートNo. 1
22404-5E-10