M3plus_OperationManual_j - 第99页
3- 34 3 4. 部品情報を作る 4.6 形状パラメーター 「補正タイプ」を設定した後、形状パラメーターを設定してください。 ( 「補 正タイプ」が未設定の場 合は、以下のパラメーターが表示されません。 ) ■ チップ部品の場合 チップ部品 26417-E5-20 A, B: 外形寸法 XY 下図を参照してノギス、マイクロメーターなどで計測した正確な値 (mm) を 入 力 し て くだ さ…
3-33
3
4. 部品情報を作る
4.5 認識パラメーター
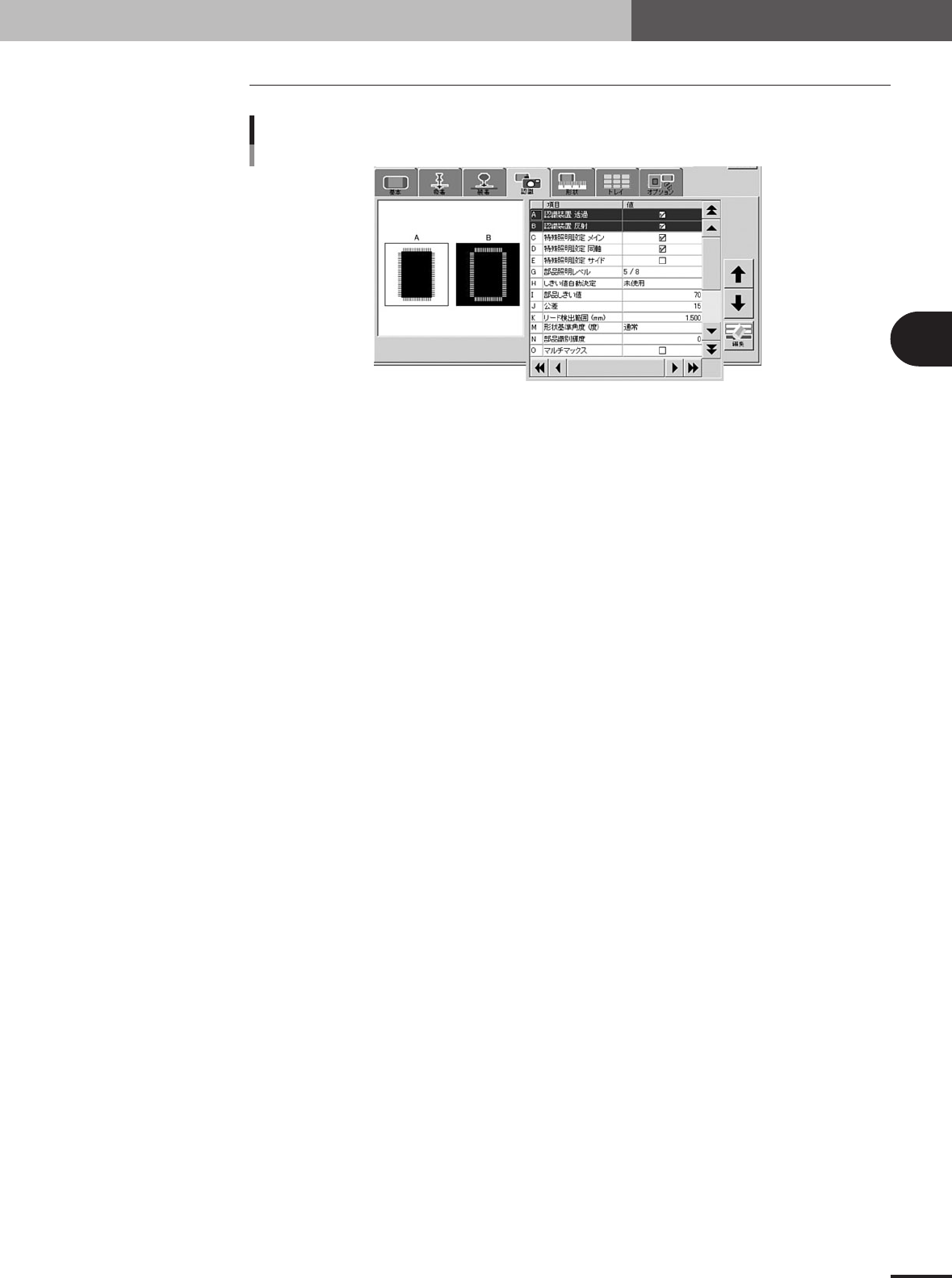
認識パラメーター
26416-E5-20
A, B: 認識装置 (透過), 認識装置 (反射)
部品認識に使用する装置を指定します。通常は初期値(「透過」と「反射」とも選択)のままで使
用します。
C∼E: 特殊照明設定
「メイン」、「同軸」、「サイド」を選択します。通常は初期値(「メイン」と「同軸」とも選択)の
ままで使用します。BGA のボール欠け認識を行いたい場合は、「サイド」のみに設定します。
G: 部品照明レベル
反射照明の明るさを指定します。通常は初期値のまま使用し、後述の補助調整で最適化します。
H: しきい値自動決定
チップ部品の標準チップのみが対象で、撮像した画像から自動的にしきい値を算出します。
I: 部品しきい値
部品を認識するときの反射部分(リード)と背景とを区別するための明るさのしきい値です。通
常は初期値のまま使用し、後述の補助調整で最適化します。BGA では、このパラメーターは省略
されます。
J: 公差
部品認識するときに許容する誤差を 0 ∼ 100% で指定します。数値が大きいほど公差が大きくな
ります。最初は初期値を使用し、後述の補助調整の認識テストで様子を見ながら、徐々に大きく
していくとよいでしょう。部品の種類にもよりますが、通常は 30% 前後が適当です。
K: リード検出範囲
部品のリードを検出する範囲です。この値が大きいほど検出範囲が広がりますが、画像処理速度
が低下します。通常は初期値のまま使用し、後述の補助調整で最適化します。
M: 形状基準角度
部品形状の定義角度の基準を設定します。通常は初期値のまま使用します。
N: 部品識別輝度
通常の部品認識に成功した後に測定する部品の外形部分の輝度レベルのしきい値です。測定され
た輝度がこのしきい値以上であれば、部品認識は成功とみなされます。(この機能は「補正タイプ」
が「標準チップ」の場合にのみ有効です。)
O: マルチマックス
マルチマックス補正をするかしないか設定します。する場合はチェックしてください。
3-34
3
4. 部品情報を作る
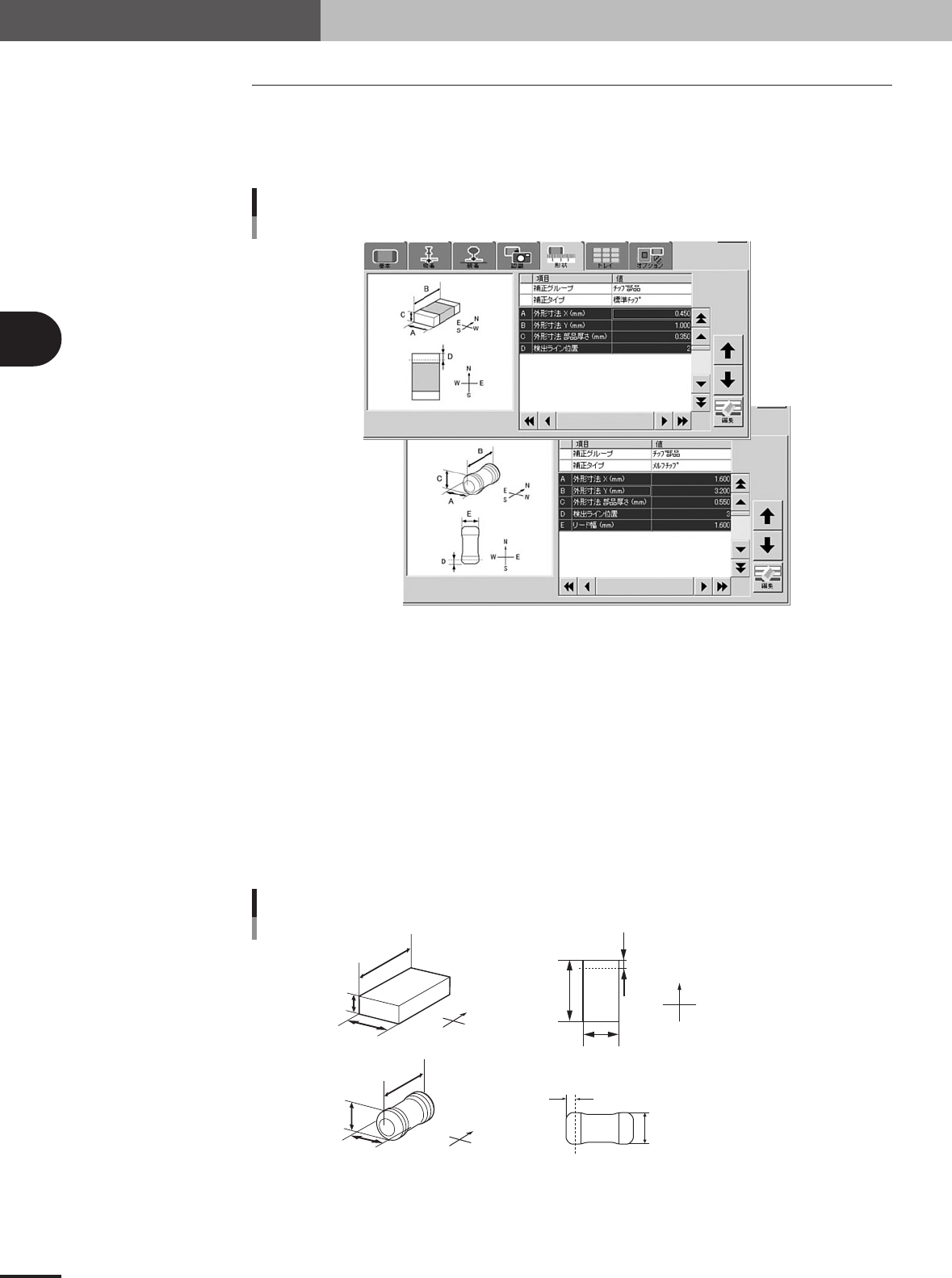
4.6 形状パラメーター
「補正タイプ」を設定した後、形状パラメーターを設定してください。(「補正タイプ」が未設定の場
合は、以下のパラメーターが表示されません。)
■ チップ部品の場合
チップ部品
26417-E5-20
A, B: 外形寸法 XY
下図を参照してノギス、マイクロメーターなどで計測した正確な値 (mm) を入力してください。
C: 外形寸法 部品厚さ
下図を参照してノギス、マイクロメーターなどで計測した正確な値 (mm) を入力してください。
D: 検出ライン位置
リードの先端から何画素内側の位置にリードを検出するためのラインを引くか設定します。通常
は初期値のまま使用します。
E: リード幅
部品両端の銀色の端子部分の幅を入力します。後ほど補助調整で確認します。 (標準チップにはこ
のパラメーターはありません。)
N
S
E
W
A
C
B
N
S
WE
A
B
D
N
S
E
W
C
A
B
E
D
上面図
A : 外形寸法X
B : 外形寸法Y
C : 部品厚さ
D : 検出ライン位置
A : 外形寸法X
B : 外形寸法Y
C : 部品厚さ
D : 検出ライン位置
E : リード幅
チップ部品の形状パラメーター
22417-E0-10
3-35
3
4. 部品情報を作る
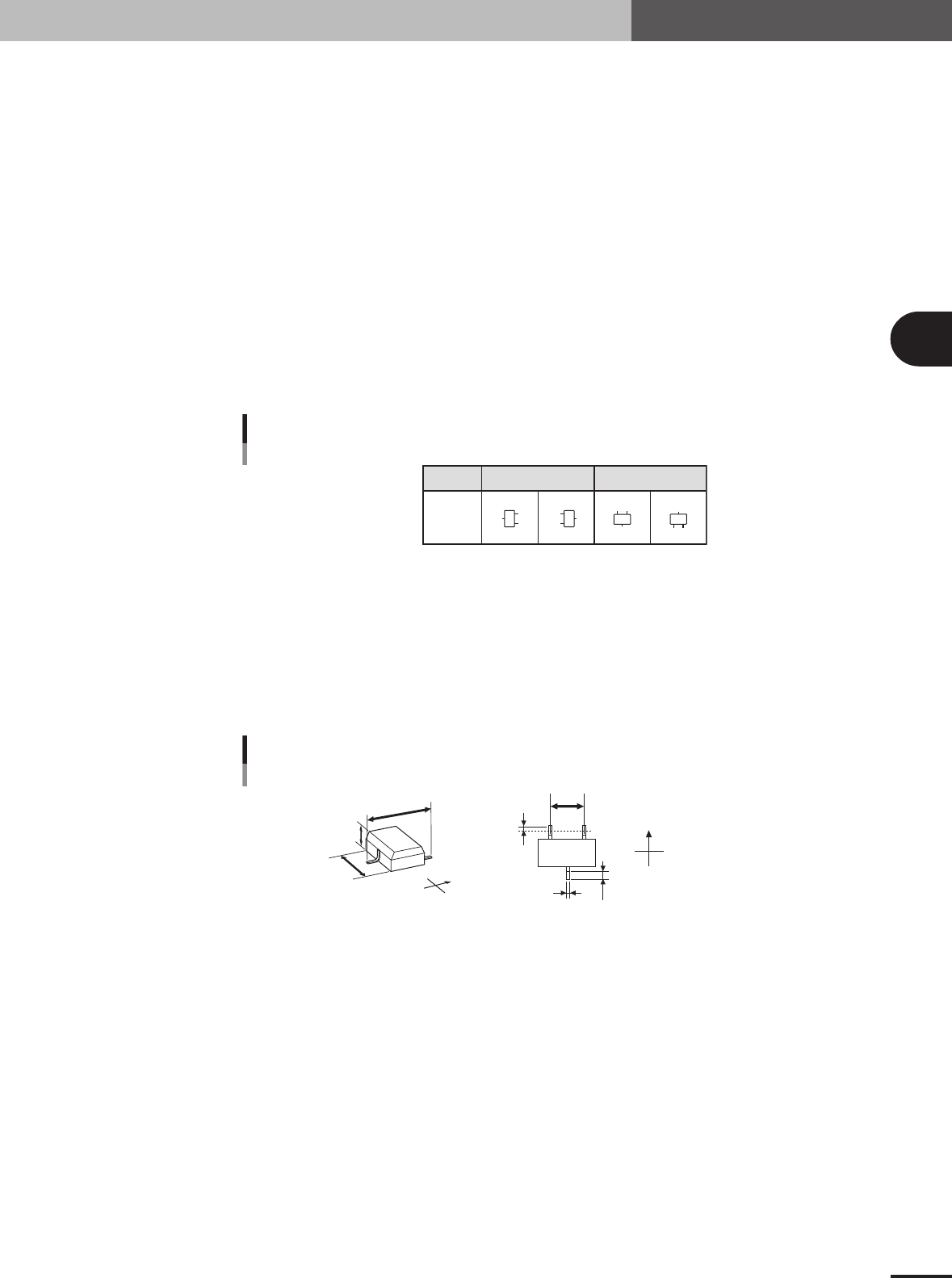
■ ミニ Tr/SOT の場合
A, B: 外形寸法 XY
リードも含めた外形寸法をノギス、マイクロメーターなどで計測した正確な値 (mm) を入力して
ください。
C: 外形寸法 部品厚さ
ノギス、マイクロメーターなどで計測した正確な値 (mm) を入力してください。
D: 検出ライン位置
リードの先端から何画素内側の位置にリードを検出するためのラインを引くか設定します。通常
は初期値のまま使用します。
E: 検出ライン幅
リードを検出するラインの幅を指定します。リードの長さが 0.0 ∼ 0.3mm の部品は「1 ∼ 2」、
0.3 以上の部品は「2 ∼ 3」に設定します。通常は初期値のまま使用します。
F, G: リード本数 NS
NS 方向それぞれに存在するリード本数を入力します。
吸着角度
部品荷姿
0° 90°
NSNS
N
S
N
S
ミニトラ/SOTのリード方向
24408-E0-10
H, I: リードピッチ NS
リード間の幅を正確な値で入力してください。
J: リード幅
リードの幅を正確な値で入力してください。
K: 反射リード長
認識時に光る部分のリードの長さを入力します。通常は初期値のまま使用します。
N
S
E
W
B
C
A
N
S
E
W
H
K
D
J
A : 外形寸法X
B : 外形寸法Y
C : 部品厚さ
D : 検出ライン位置
H : リードピッチ
J : リード幅
K : 反射リード長
下面図
ミニトランジスターの形状パラメーター
22420-E0-10