00197740-12_FeatureDescription_SR7xx_R20-2_DE.pdf - 第212页
Stationssoftware 7xx bis 7 14.0 (R20-2) / Funktionsbeschreibung Ausgabe 11/2020 212 Pipetten-Scanning Das Dialogfenster unter Einstell ungen – Maschinen optionen , in dem das Pipe tten-Scanning konfiguriert wird, enthält…
Stationssoftware 7xx bis 714.0 (R20-2) / Funktionsbeschreibung Ausgabe 11/2020
211
Pipettenrüstung für den Bestückkopf
Abbildung 10-32: Verschmutzte Pipette – Kopfansicht
Pipettenwechsler
In der Ansicht Pipettenwechsler gibt es drei neue Aktionen, um den Pipettenzustand zu "sauber"
zu ändern:
– Pipette in Garage n ist sauber (für die ausgewählte Pipette)
– Pipetten in Magazin n sind sauber (für alle Pipetten im ausgewählten Magazin)
– Alle Pipetten in allen Magazinen sind sauber (für alle Pipetten in allen Magazinen am
angezeigten Stellplatz)
Beispiel:
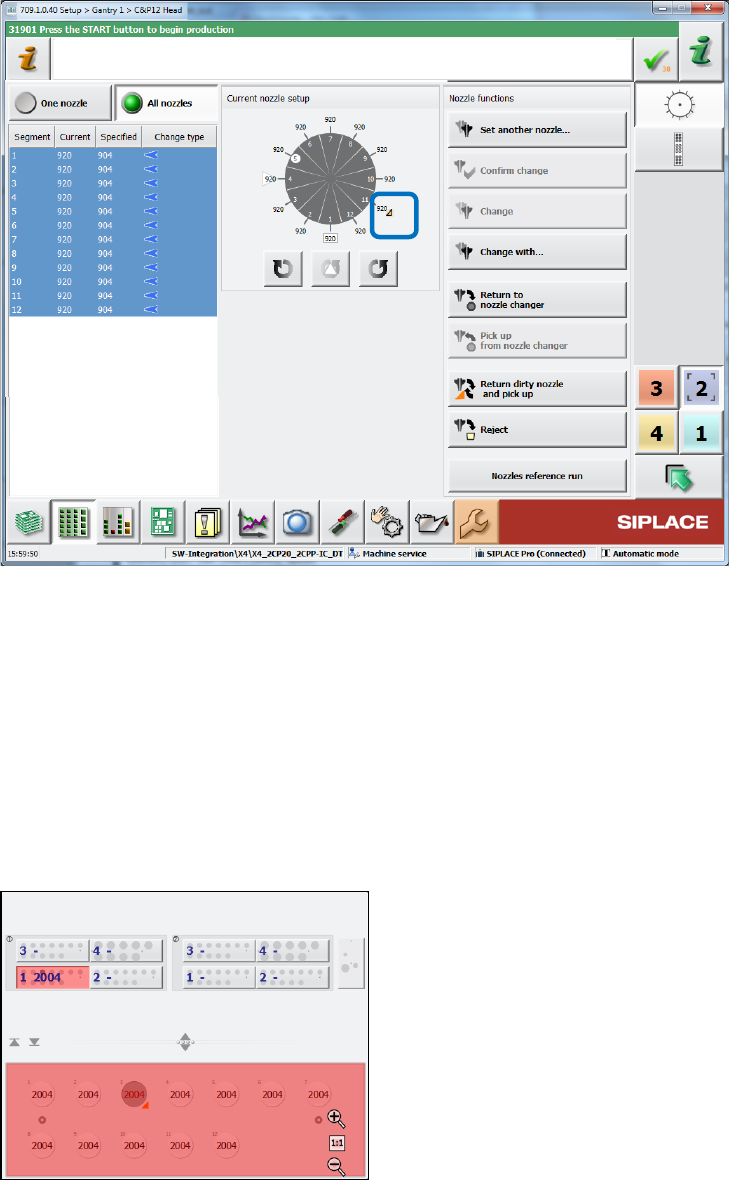
Abbildung 10-33: Verschmutzte Pipette – Pipettenwechsler
Obwohl zwölf Pipetten 2004 im Pipettenwechsler vorhanden sind, ist die Markierung rot und die
Pipettenrüstung fehlerhaft, weil eine Pipette (in Garage 3) verschmutzt ist und nicht mehr abgeholt
werden darf. Der Bediener muss die Pipette reinigen und die Stationssoftware informieren, dass
die Pipette gereinigt wurde. Der Bediener kann auch die verschmutzte Pipette über die Aktion
Garage auf "leer" setzen entfernen und eine neue, gereinigte Pipette vom selben Typ aufsetzen.
Allerdings wird die Aktion Pipette in Garage quittieren die Pipette nicht als gereinigt setzen, die
Pipettenrüstung verbleibt fehlerhaft!
Stationssoftware 7xx bis 714.0 (R20-2) / Funktionsbeschreibung Ausgabe 11/2020
212
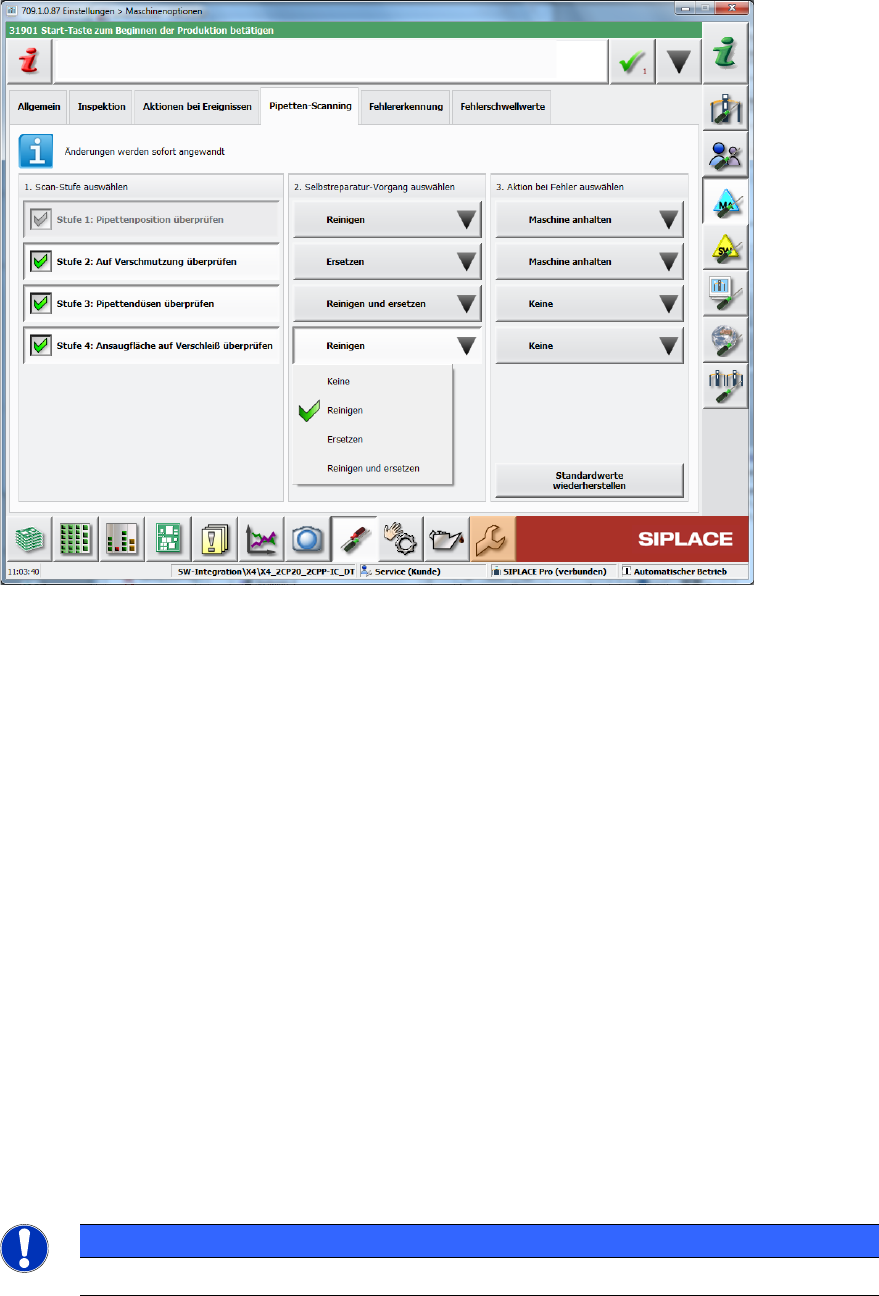
Pipetten-Scanning
Das Dialogfenster unter Einstellungen – Maschinenoptionen, in dem das Pipetten-Scanning
konfiguriert wird, enthält zwei neue selbstregenerierende Aktionen: Ersetzen und Reinigen und
ersetzen.
Abbildung 10-34: Verschmutzte Pipette – Maschinenoptionen
Statusübersicht über die Kopfsegmente
Das Dialogfenster Statusübersicht für die Kopfsegmente enthält den neuen Zustand disabled:
nozzle dirty.
Vorbeugende Wartung
Zusätzlich zu den oben genannten Änderungen, ist die Ansicht Vorbeugende Wartung erweitert
worden Siehe Abschnitt 10.13.13.
10.15 Erweiterte automatische Erkennung der Fördererschrittweite
Kompatibler Modus: Komplett
Die vorhandene Funktion Automatische Erkennung der Fördererschrittweite ist in dieser
Stationssoftware-Version erweitert worden.
Die Stationssoftware kann jetzt die Schrittweite automatisch zum gemessenen Wert erhöhen, wenn
die erwartete Schrittweite undefiniert ist (Wert 0). Die Stationssoftware führt häufige Messungen
der Schrittweite durch (nach 700 Bestückungen), wenn die erwartete Schrittweite undefiniert ist,
um kontinuierlich die gemessenen Schrittweitenwerte zu überprüfen und den Einfluss von
fehlerhaften automatischen Schrittweitenerhöhungen zu minimieren.
HINWEIS
Diese Funktion beeinflusst die Bestückleistung.
Stationssoftware 7xx bis 714.0 (R20-2) / Funktionsbeschreibung Ausgabe 11/2020
213
10.16 Verbesserte Erkennung umgedrehter Bauelemente für Dioden
Kompatibler Modus: Komplett
Kleine SOT- und SOD-Dioden werden manchmal umgedreht auf die Leiterplatten bestückt, was zu
Problemen und hohen Abwurfraten führen kann. Deswegen ist die SIPLACE Vision-Funktion zur
Erkennung von umgedrehten Bauelementen verbessert worden. Ab Stationssoftware-Version
709.1 nutzt diese Funktion das unterschiedliche Aussehen der Gullwing-Beinchen oben und unten
auf dem Bauelement, um zu erkennen welche Seite vor der Kamera ist. In niedrigeren
Stationssoftware-Versionen wird diese Messung ignoriert!
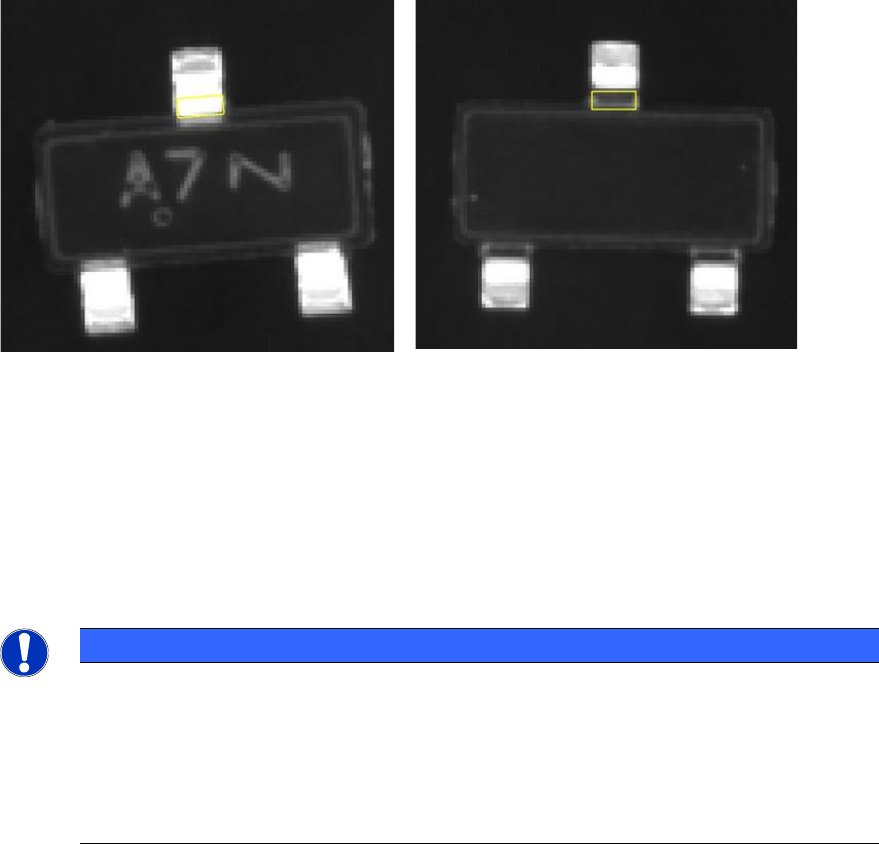
SIPLACE Vision führt eine Messung in zwei Schritten durch, wahlweise mit unterschiedlichen
Beleuchtungseinstellungen. Im ersten Schritt wird die Position der Gullwing-Beinchen bestimmt; im
zweiten Schritt wird die Beinchenverbiegung erkannt.
Bauelement umgedreht -> innere
Beinchenenden sind hell
Bauteil korrekt -> innere Beinchenenden
sind dunkel
Die Erkennung umgedrehter Bauelemente kann mit der Schaltfläche Erkennung umgedrehter
Bauteile in der Liste Optionen gestartet werden. Der Bediener wird beim Eintragen der benötigten
Daten von einem Assistenten unterstützt.
Die Funktion kann mit mehrfachen Gesichtsfeldmessungen und Pin1-Erkennung kombiniert
werden, aber nicht mit Mustererkennung und Klebepunkteinspektion.
HINWEIS
Die Erkennung umgedrehter Bauelemente funktioniert nur solange die inneren
Beinchenenden eine ausreichend konstante Position zur Bauelementmitte haben. Wenn
die Toleranzen für den Bauelementkörper groß sein sollten, könnte es sein, dass der
Bauelementkörper oder die Kontaktfläche statt der inneren Beinchenenden ausgewertet
werden. Dies würde dann zu falschen Ergebnissen führen (Körper zu klein -> Fläche hell
-> ein korrektes Bauelement wird abgeworfen; Körper zu groß -> Fläche dunkel -> ein
umgedrehtes Bauelement wird nicht erkannt).