OM-1466-001_w.pdf - 第33页
30 5. リード浮き検出設定手順 運転方法の設定 部品ライブラリ[制御]の設定 部品認識テスト 自動運転 • 運転方法の設定を行います。 詳細 につ いて は “6 . 運転 方法 ” を参照 して ください。 • 部品ライブラリ [ 制御 ] の設定を行います。 詳細 に つい ては “7 . 部品 ライ ブ ラリ ” を参 照してください。 • 部品認識テストにて確認を行います。 詳細については “10. 部品認識テスト ” を …
29
4.1 測定原理
4.1 測定原理
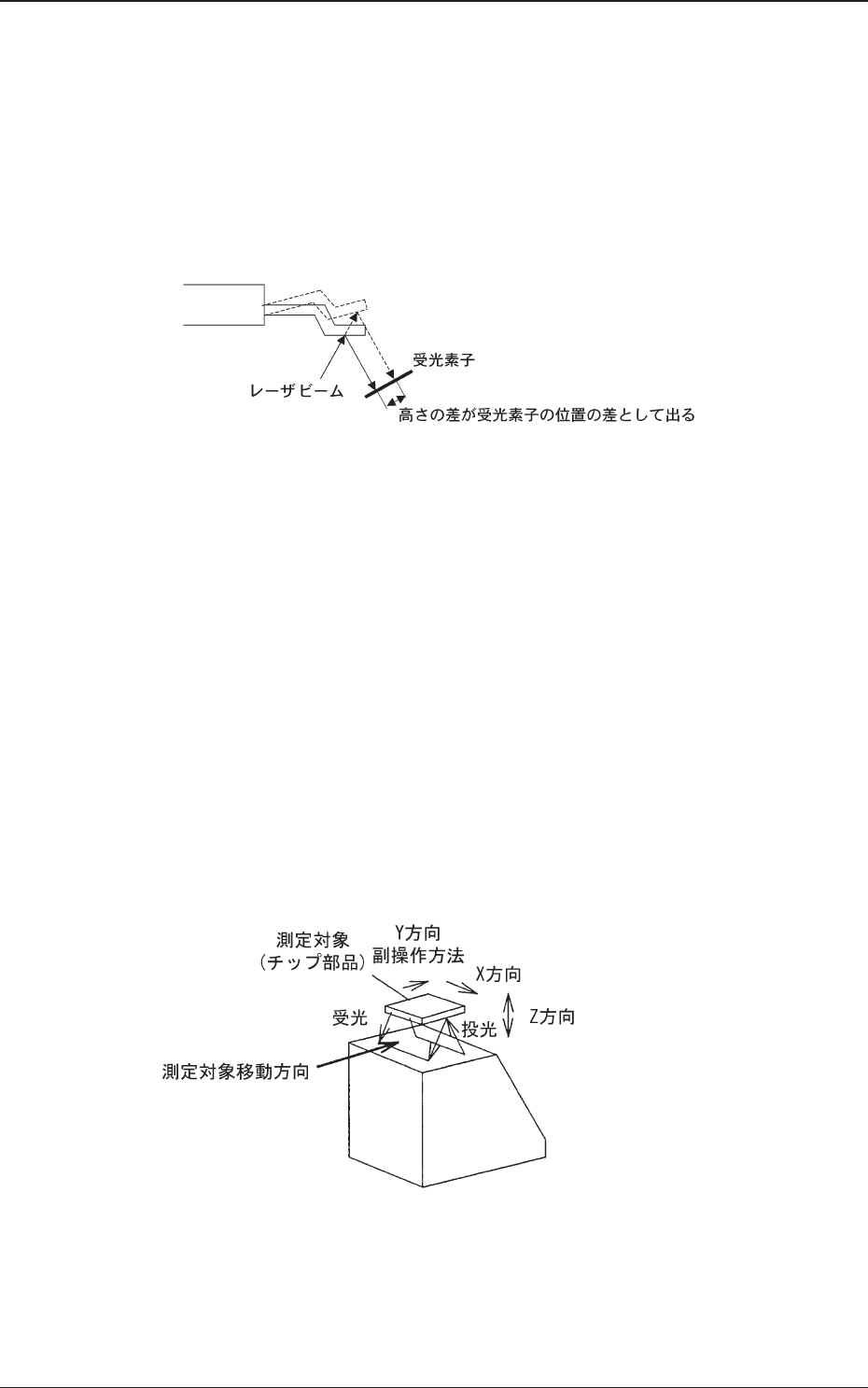
リード浮き計測の原理
•
レーザビームをリードに照射し、その反射を受光素子にて検出
します。
•
リードの高さが変ると受光素子の検出位置が変りますので、受
光素子の検出位置の変化を得ることによりリードの高さを検出
します。
Fig. 4
リード浮き量の検出方法
•
リード浮き量の検出には、走査型レーザ変位計 ( 赤外線半導体
レーザ、クラス 1) を使用しています。
•
レーザビームをポリゴンミラーにて X 方向にスキャンさせるこ
とにより、測定対象部品の X 方向の連続した高さデータを得る
ことができます。さらに測定対象部品を Y 方向に走査すること
により、測定対象部品底面の 3 次元情報を得ることができます。
得られた 3 次元情報よりリード位置を抽出し、リード浮き量を
検査します。
参考 : クラス 1 のレーザ光は、設計上安全とされるものです。100
秒間その光を瞬き無しに見続けても、網膜に損傷を与えない
レベルです。
リード浮き検出ユニット
(レーザ操作方向)
Fig. 5
0710-001
30
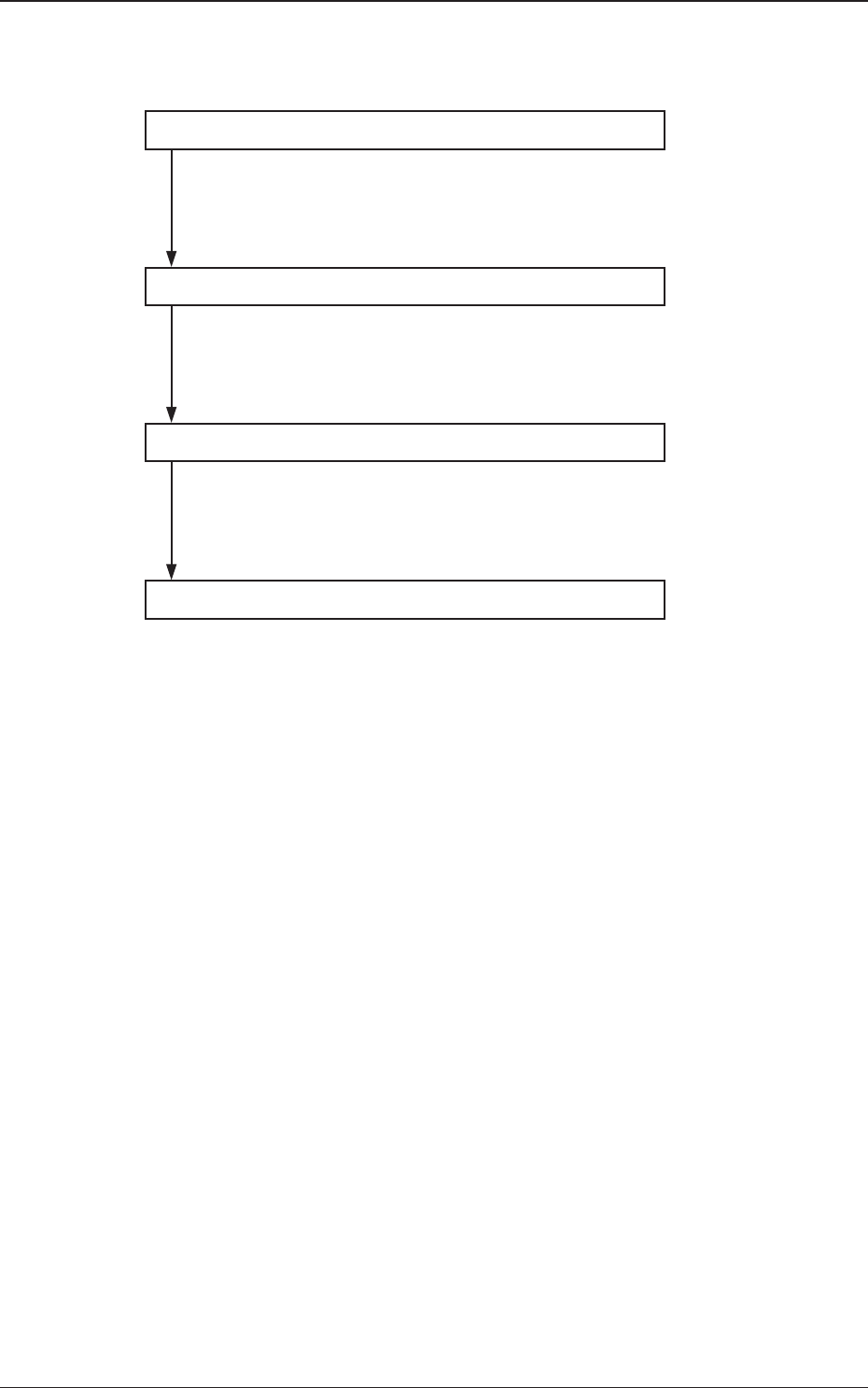
5. リード浮き検出設定手順
運転方法の設定
部品ライブラリ[制御]の設定
部品認識テスト
自動運転
•
運転方法の設定を行います。
詳細については“6. 運転方法”を参照して
ください。
•
部品ライブラリ [ 制御 ] の設定を行います。
詳細については“7. 部品ライブラリ”を参
照してください。
•
部品認識テストにて確認を行います。
詳細については “10. 部品認識テスト ” を
参照してください。
5. リード浮き検出設定手順
0710-001
31
6. 運転方法
6. 運転方法
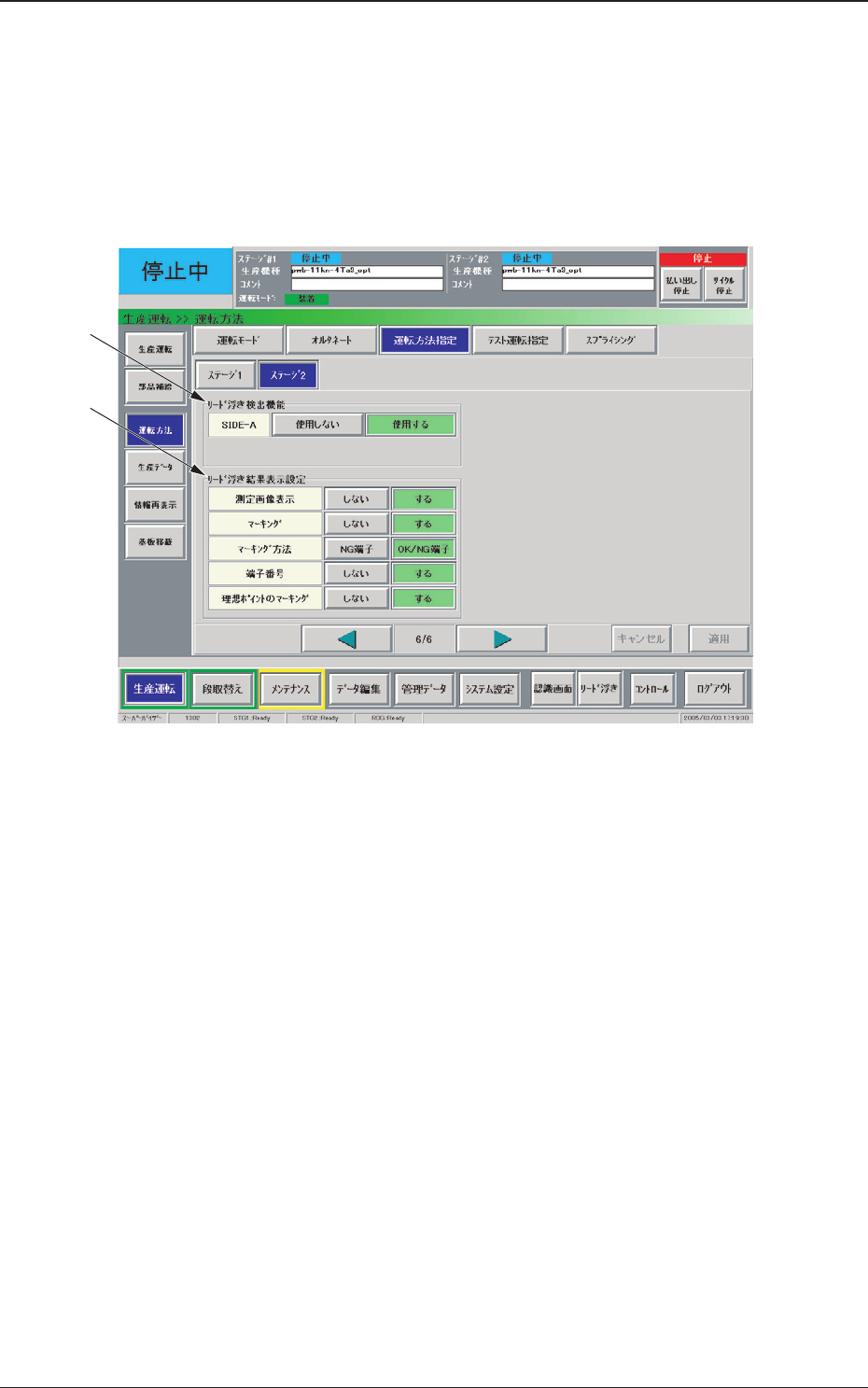
6.1 運転方法設定
運転方法タブメニューの“運転方法設定”(6ページ目)を開き、“リー
ド浮き検出機能 ” を設定します。
[1]
[2]
Fig. 6 運転方法設定 (6 ページ目 )
[1] リード浮き検出機能
リード浮き検出機能を“使用しない”または “ 使用する ” から
選択します。
使用しない
リード浮き検出を使用しません。
使用する
リード浮き検出を使用します。
0710-001