OM-1466-001_w.pdf - 第53页
50 9.1 センサヘッド設置用調整 [3] リード浮きユニット測定値表示 [ ノズル 1] ~ [ ノズル 12] ボタンを選択すると、ノズルごと の設定値が表示されます。 ノート 操作画面は、高速ヘッド ( 標準仕様 ) の場合を示します。 多機能ヘッド ( 多機能ヘッド仕様:HM-G100) の場合は、 [ ノズル 1] ~ [ ノズル 3] と表示されます。 ノズルごとにリード浮き検出ユニットにて 0 ° 、 90 ° 、180…
49
9.1 センサヘッド設置用調整
9.1 センサヘッド設置用調整
センサヘッドの設置および調整時に使用する画面です。
注 意
通常はこの画面を操作することはありません。
警告
センサヘッド設置用調整の操作は、リード浮き検出の
精度に影響しますので、当社サービス員およびティー
チング方法を習得された方以外は操作をしないでくだ
さい。
[5]
[6]
[7]
[8]
[11] [10] [3]
[1] [2]
[4]
[12]
[13]
[14]
[15]
[9]
[16]
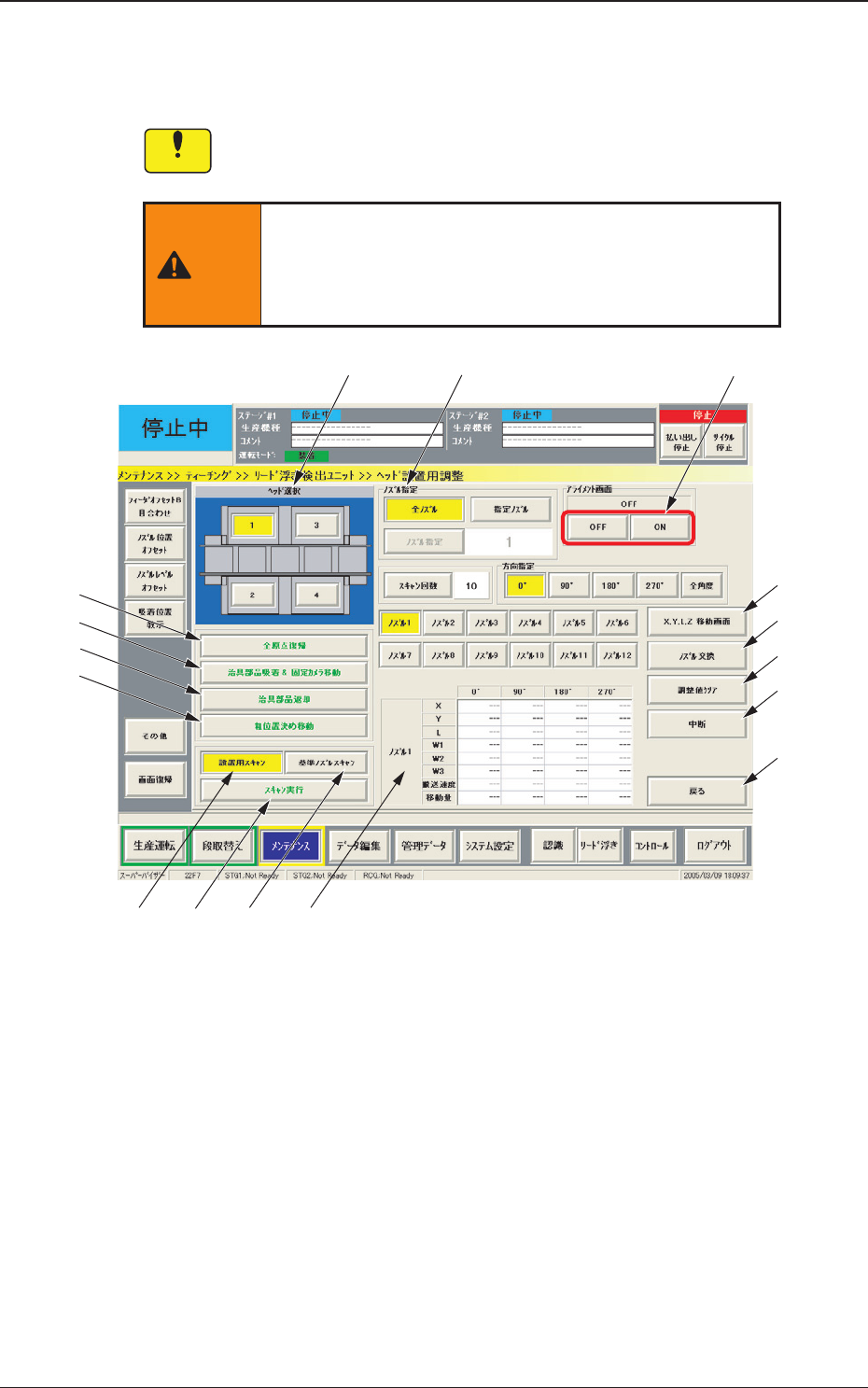
Fig. 22 センサヘッド設置用調整
[1] ヘッド選択
測定する装着ヘッドを選択します。
[2] ノズル指定
測定するノズルを選択します。
0710-001

50
9.1 センサヘッド設置用調整
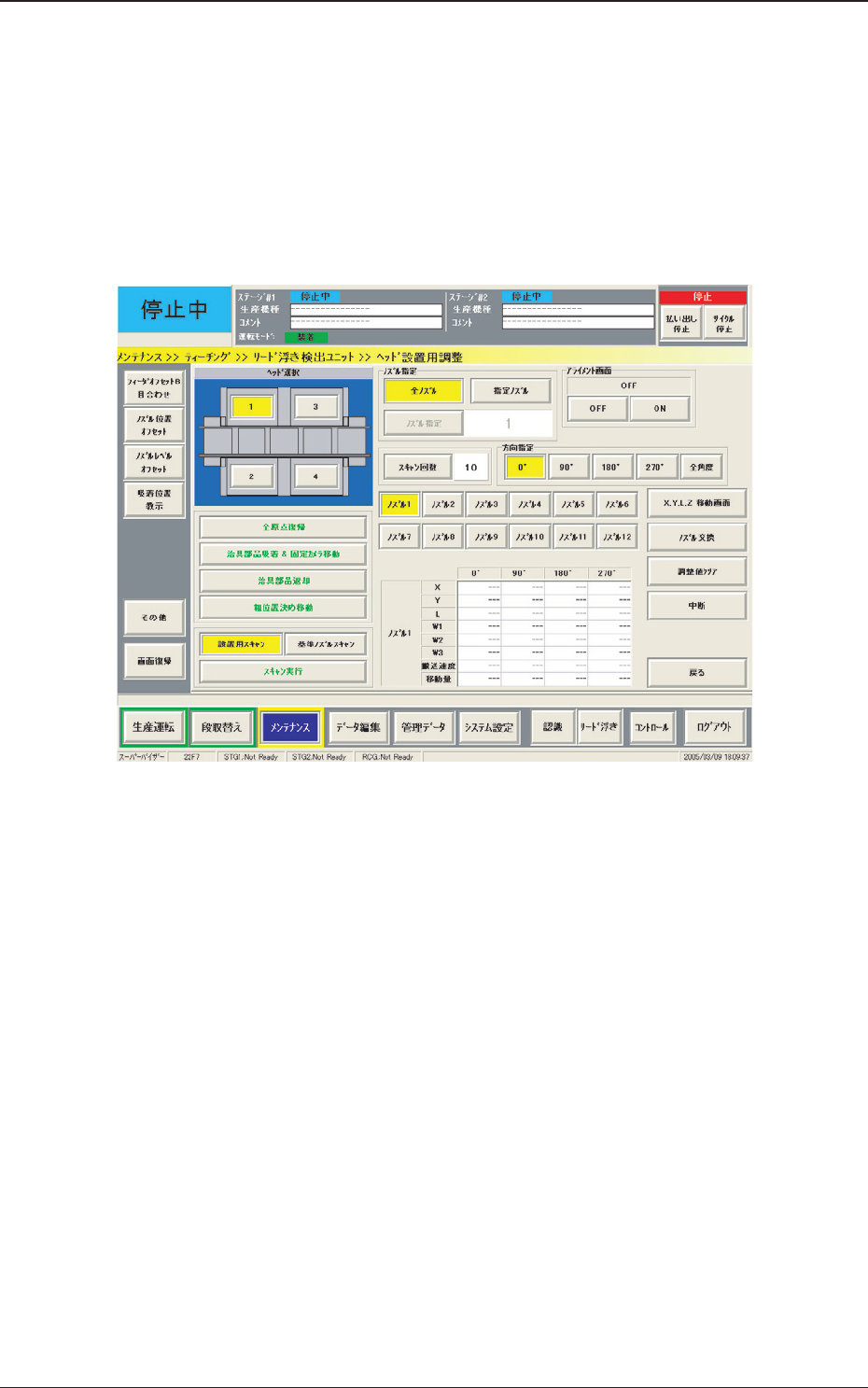
[3] リード浮きユニット測定値表示
[ ノズル 1] ~ [ ノズル 12] ボタンを選択すると、ノズルごと
の設定値が表示されます。
ノート
操作画面は、高速ヘッド ( 標準仕様 ) の場合を示します。
多機能ヘッド ( 多機能ヘッド仕様:HM-G100) の場合は、
[ ノズル 1] ~ [ ノズル 3] と表示されます。
ノズルごとにリード浮き検出ユニットにて 0
°
、 90
°
、180
°
、270
°
の 4 方向にて測定したリード浮き校正治具の測定結果を表示し
ます。測定結果としては、X、Y、L、W1、W2、W3、搬送速度、移
動量が表示されます。この測定結果を見ながら、センサヘッド
の位置調整を行います。
X : ズレ量 X 測定値
Y : ズレ量 Y 測定値
L : ズレ量 L ( 高さ ) 測定値
W1 : センサヘッドの X 軸高さ方向の傾き
W2 : センサヘッドの Y 軸高さ方向の傾き
W3 : センサヘッドの Y 軸走り方向のズレ量
搬送速度 :
測定時の治具搬送速度
移動量 : 測定した治具のサイズ
[4] [ アライメント画面 ON/OFF] ボタン
リード浮き検出ユニットがアライメント画面を表示 / 非表示し
ていることを示します。
アライメント画面が ON の場合は、リード浮き検出ユニットが計
測を行えません。
[5] [ 全原点復帰 ] ボタン
各 X、Y、L 軸の原点復帰を行います。
実動作は操作パネルの[START] ボタンで動作を開始します。
[6] [ 治具部品吸着&固定カメラ移動 ] ボタン
指定装着ヘッド、指定ノズルにおいてリード浮き校正治具を吸
着後、部品認識カメラの位置に移動し、認識を行います。
[7] [ 治具部品返却 ] ボタン
指定装着ヘッド、指定ノズルに吸着しているリード浮き校正治
具を治具ストッカに戻します。
•
治具を吸着している装着ヘッド、ノズルを正しく指定しない
と、治具を戻すことができません。
•
センサヘッドの位置を動かすと、治具のストッカ位置も変り
ますので、治具を正しく戻すことができなくなります。
手で一度治具を取外して、治具部品返却動作後、治具をストッ
カに戻してください。
0710-001
51
9.1 センサヘッド設置用調整
[8] [ 粗位置決め移動 ] ボタン
センサヘッドの粗位置決めを行うため、治具を計測中心位置に
移動させます。
[9] [ 設置用スキャン ] ボタン
センサヘッドの粗位置決めを行うため、治具を計測中心位置に
移動させます。
このボタンを押すと、以下のような画面が表示されます。
Fig. 23 設置用スキャン
0710-001