00194103-01.pdf - 第87页
User Manual SIPLAC E F5 HM 3 Technical data Software Vers ion SR.408.xx 03/2006 U S Edition 3.8 Gantry 87 3.8.3 T echnical dat a for the X axis 3.8.4 Structure of the Y axis The Y axis es senti ally consis ts of the f ol…
3 Technical data User Manual SIPLACE F5 HM
3.8 Gantry Software Version SR.408.xx 03/2006 US Edition
86
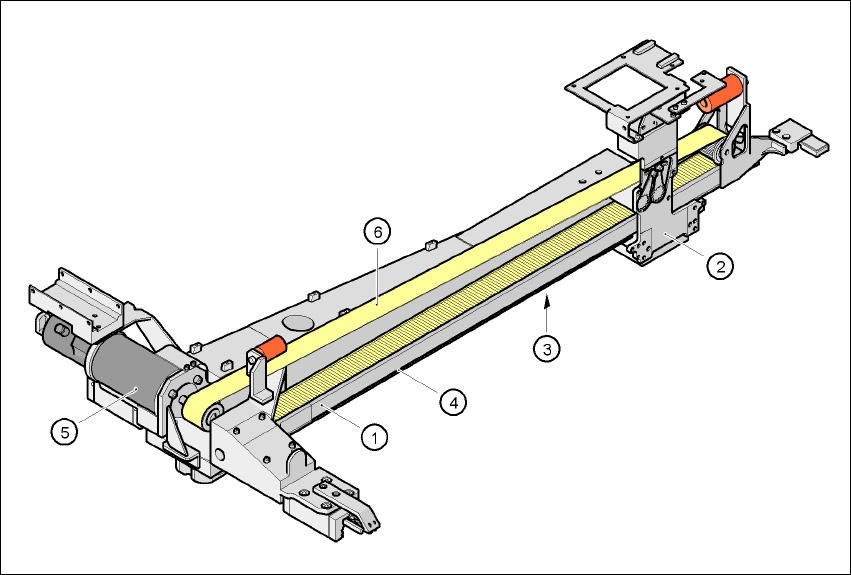
3.8.2 Structure of the X axis
3
Fig. 3.8 - 2 Structure of the X axis
The X axis essentially consists of the following main modules: 3
– gantry arm (1)
– head mount (2)
– X axis measuring system (3)
– X axis guide system (4)
– X axis three-phase AC servomotor (5)
– toothed belt (6)
The head mount holds the following components 3
– sub-gantry camera (camera for the PCB vision module)
– head board
– measuring head for the X axis measuring system
– Collect&Place head
User Manual SIPLACE F5 HM 3 Technical data
Software Version SR.408.xx 03/2006 US Edition 3.8 Gantry
87
3.8.3 Technical data for the X axis
3.8.4 Structure of the Y axis
The Y axis essentially consists of the following main modules: 3
– Y axis three-phase AC servomotor
– Y axis toothed belt
– Y axis guide system
– Y axis measuring system
3
Each Y axis is driven by a three-phase AC servomotor. An anti-crash circuit prevents the travers-
ing paths of the gantries meeting. 3
3
3.8.5 Technical data for the Y axis
Drive Three-phase AC servomotor/toothed belt
Maximum speed 2.5 m/sec.
Traversing path 620 mm
Distance measuring system Metal linear scale
Scale length 646 mm
Resolution 1.0 µm
Drive Three-phase AC servomotor/toothed belt
Maximum speed 2.5 m/sec.
Travel range for the gantries 910 mm
Distance measuring system Metal linear scale
Scale length 970 mm
Resolution 1.0 µm
3 Technical data User Manual SIPLACE F5 HM
3.9 Placement heads Software Version SR.408.xx 03/2006 US Edition
88
3.9 Placement heads
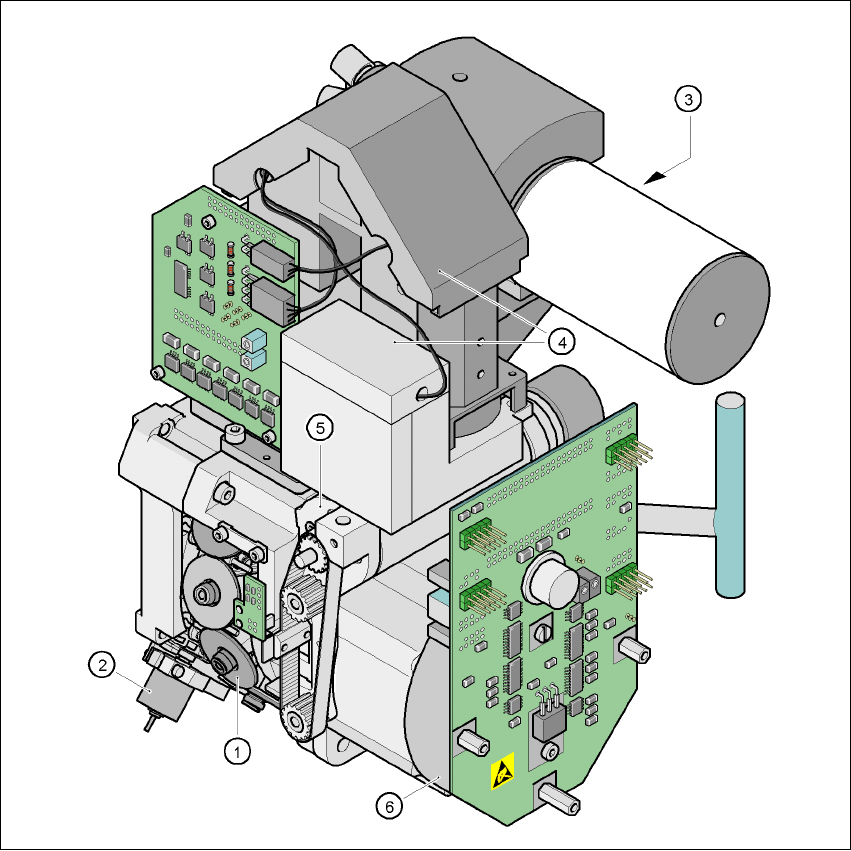
3.9.1 Structure of the 12-segment Collect&Place head
3
Fig. 3.9 - 1 Structure of the 12-segment Collect&Place head
All the components are inserted with the same cycle time. Before the component is inserted, it is
measured by the optoelectronic vision module. 3
(1) Star with 12 sleeves (2) Motor for "Reject" valve adjustment drive
(3) Turning station (4) Component vision module
(5) Z axis drive (6) Star motor