ServiceManual_UR10_zh_3.2.6 - 第145页
保留所有 权 利 在以下两种情况下,可能隐藏这些故障: 人员只需重置故障,而无需审查故障发生的原因。 忽略保护性停止屏蔽故障检测! 请小心对待保护性停止。 了解为何碰巧改进了您的程序并保留了故障检测! 一般而言,保护性停止设计通知用户机器人由于外部事件(例如,碰到障碍物等)而 停止。如果机器人被推到接近极限,机器人可以产生保护性停止,表示其不能遵循期 望的轨迹。 在保护性停止后,必须在恢复操作前执行以下操作: 清除障碍,在确保操作员不会…
保留所有权利
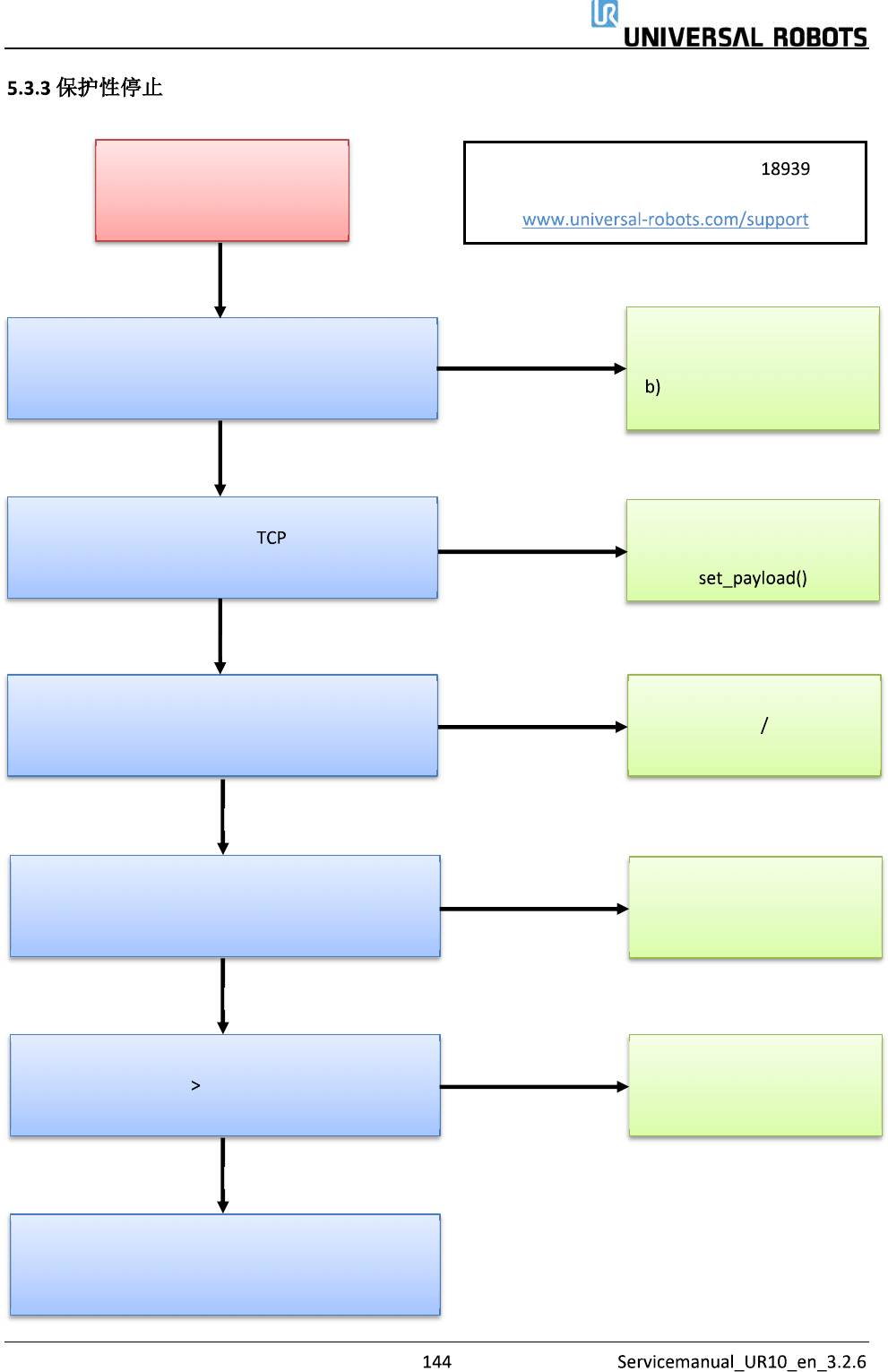
保护性停止
质心是否不同于 点?
检查工具中心点配置、有效负载和安装设置,
其必须符合工具和机器人的实际位置。
路点位置是否非常靠近机器人不能操作的底座
周围的圆柱形区域?
调整路点,远离该区域或
降低速度 加速度
是
否
检查工具中心点配置、有
效负载和安装设置
检查是否遵循了安全设
置
是
在工具中心点丝锥中,调
整质心,或使用脚本代码
是
否
机器人以过高的速度移动,还是加速非常困
难?
降低速度或加速度
是
否
按下示教器背后的自由驱动按钮,检查所有关
节的自由驱动功能 是否观察出任何异常的摩
擦或行为?
否
检查关节有无异常行为,
关节可能有机械故障
是
联系购买机器人的经销商
否
另请阅读支持网站上的项目
保留所有权利
在以下两种情况下,可能隐藏这些故障:
人员只需重置故障,而无需审查故障发生的原因。
忽略保护性停止屏蔽故障检测!
请小心对待保护性停止。
了解为何碰巧改进了您的程序并保留了故障检测!
一般而言,保护性停止设计通知用户机器人由于外部事件(例如,碰到障碍物等)而
停止。如果机器人被推到接近极限,机器人可以产生保护性停止,表示其不能遵循期
望的轨迹。 在保护性停止后,必须在恢复操作前执行以下操作:
清除障碍,在确保操作员不会阻碍路径的情况下恢复操作。 参见《维修手
册》第 节(参见下面的链接)。
机器人操作过于接近极限,应调整应用程序以减少机器人的负载,例如通过
降低加速度、正确使用混合或类似措施。
—
如果已经编程自动确认和复位保护性停止—将没有人会看到保护性停止。
自动确认和复位保护性停止将掩盖导致故障情况的问题。
出现保护性停止时,应验证原因。
如果没有冲突,则调整程序
保留所有权利
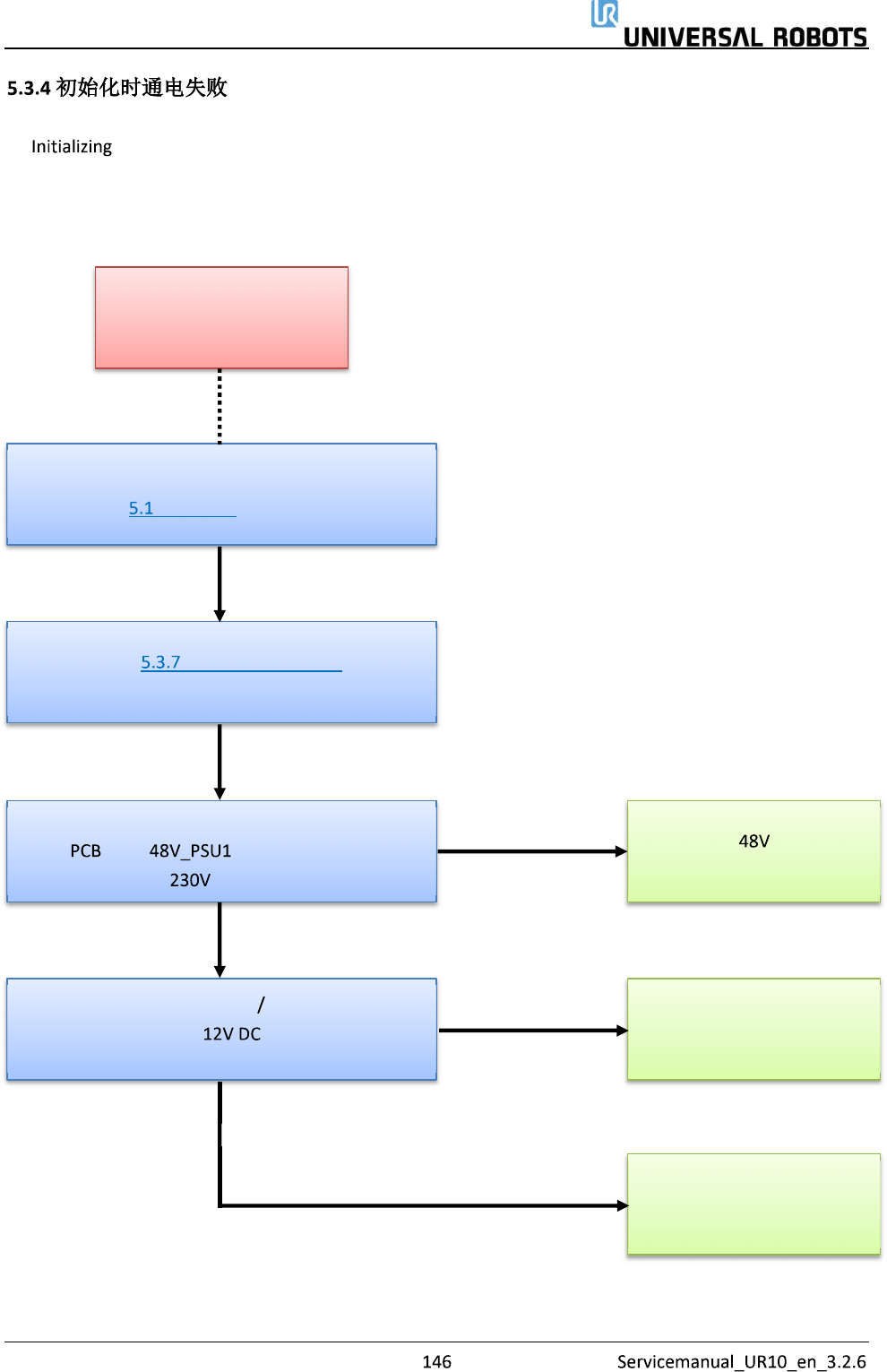
在 (初始化)窗口中,机器人电源接通数秒后关闭,这种现象可能有许多原因。
很可能是控制箱故障或与关节或工具的通信出现故障。
控制箱故障
更换 电源
通电期间(通电的前三秒内),测量分电盘
上的 连接器是否存在
交流电
进行 完整的重启操作。
测量分电盘上的红色连接器 扁平电缆中是否存
在
更换分电盘
检查日志历史记录中的错误消息,
并参考 错误代码,了解详细说明
更换安全控制板
是
是
否
否