ServiceManual_UR10_zh_3.2.6 - 第21页
保留所有 权 利 底座关 节 — 底 座安裝支架 工具法 兰 – 手腕 关 节 上臂 — 肩部关 节 肩部关 节 — 底 座关 节 肘部关 节 — 上 臂 手腕 关 节 – 手腕 关 节 手腕 关 节 – 手腕 关 节 手腕 关 节 – 下臂 肘部配 对 的关 节 — 肘部关 节 肘部配 对 的 关 节 和下臂 手腕 工具法 兰 手腕 肘部 上臂 肩部 底座 底座安裝支架 手腕
保留所有权利
•
移除外部的所有非 设备,例如,夹子、软管、电缆等。
对于安装在机器人上的非 设备的损坏,优傲机器人不予负责。
•
将机器人 零件发送到 之前,备份所有相关文件。优傲机器人对于储存在机器人中的程
序、数据或文件的丢失不承担任何责任。
如果机器人 零件曾接触过存在危险化学品或材料的环境或在其中工作,
必须在发货前对机器人进行清洁。如果无法进行清洁,货物必须附有英
文的 (材料安全数据表)和清洁说明。清洁所需的工时数将按标准
费率计算。
如果发现机器人 零件不安全,无法维修, 有权清洁机器人 零件或拒
绝使用以及退回零件(费用由客户承担)。
• 您可以在章节 中找到打包程序。机器人打包
保留所有权利
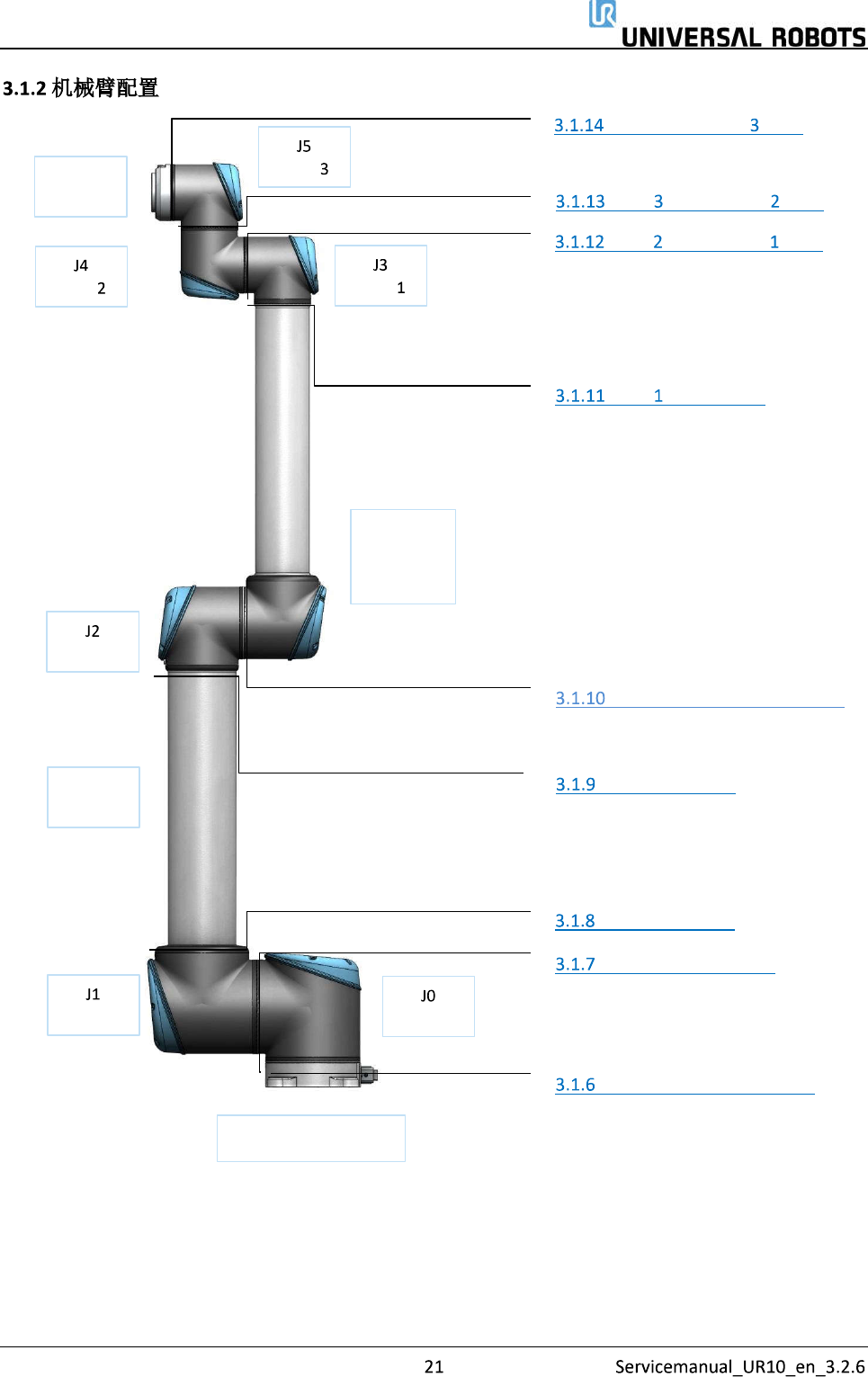
底座关节—底座安裝支架
工具法兰 – 手腕 关节
上臂—肩部关节
肩部关节—底座关节
肘部关节—上臂
手腕 关节 – 手腕 关节
手腕 关节 – 手腕 关节
手腕 关节 – 下臂
肘部配对的关节—肘部关节
肘部配对的
关节和下臂
手腕
工具法兰
手腕
肘部
上臂
肩部
底座
底座安裝支架
手腕
保留所有权利
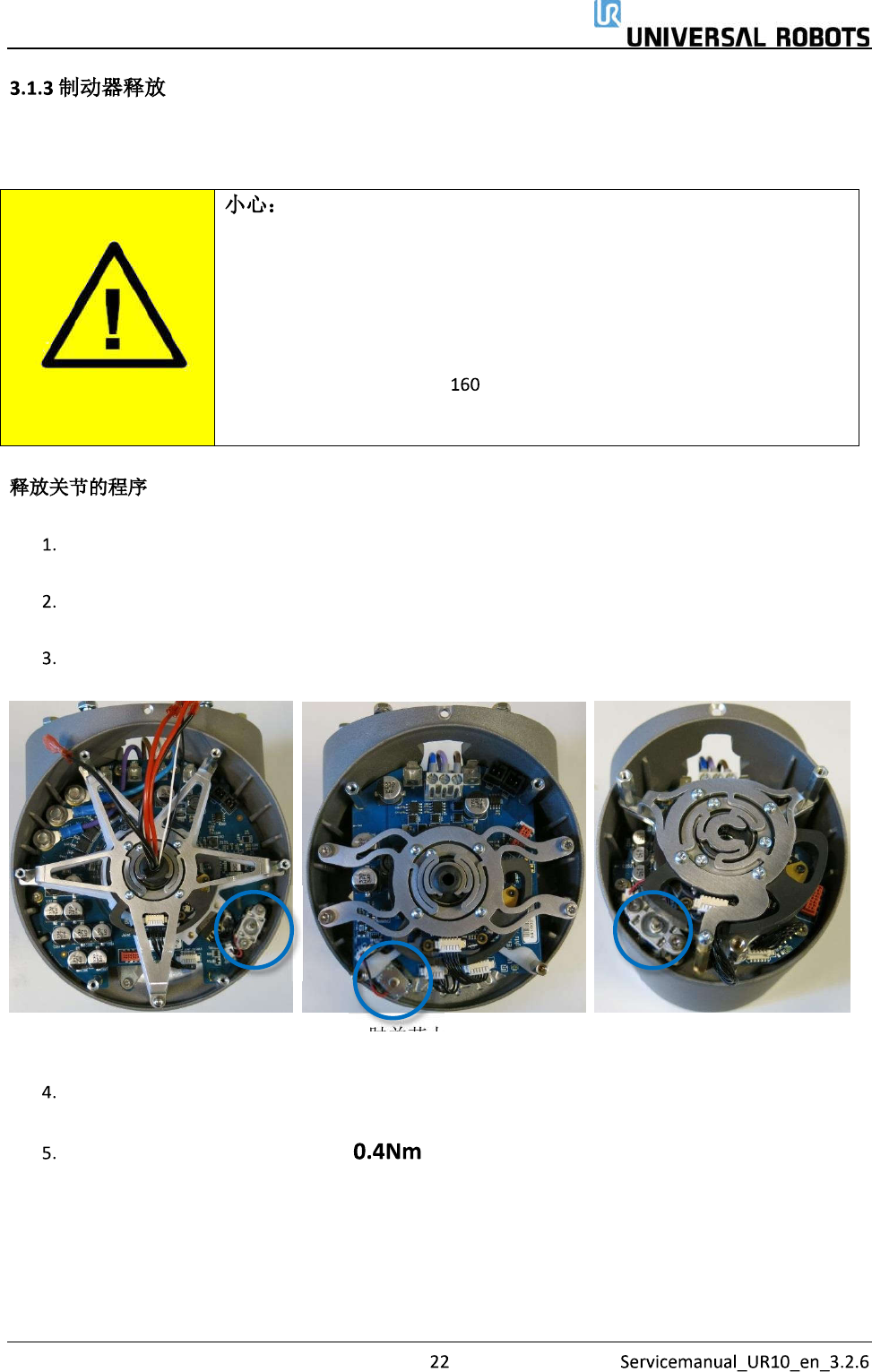
如果需要,可以在没有连接电源的情况下释放关节上的制动器。
• 在释放制动器之前,应拆卸任何危险零件,以避免任何危险情
况,这至关重要。
• 如果释放底座关节、肩部关节或肘部关节上的制动器,在松开制
动器之前,应进行适当的机械支撑,这至关重要。
• 释放制动器时,务必确保人员没有危险。
• 仅在必要的范围内移动关节。
关节移动不得超过 度,以确保机器人可以找到其原始物理位
置。
关闭控制器。
拆下关节上的蓝色盖子。
向下推动制动销释放,之后,可以转动关节。
底部和肩部关节上的制动器, 肘关节上的制动器, 手腕关节上的制动器
确保将蓝色盖子正确地放回关节上,并拧紧螺钉,之后方可开启控制器。
蓝色盖子上螺钉的正确扭矩值为