ServiceManual_UR10_zh_3.2.6 - 第26页
保留所有 权 利 确保所有垫圈均 与螺栓头齐 平(这至关重要),然 后,顺时针轻轻扭转零 件大约 度,直至到达 机械止动位置。 轻轻拧紧螺钉, 直到其几乎 处于正确位置,然后, 交叉拧紧(如下图所示 )。 始终从位于对准 丝锥的螺 钉开始 上紧至正确的扭 矩,确保 两个面平行。 请参见 扭矩值 将灰色特氟隆环 滑动到位, 并轻轻地将扁型环放回 至特氟隆环的顶部。
保留所有权利
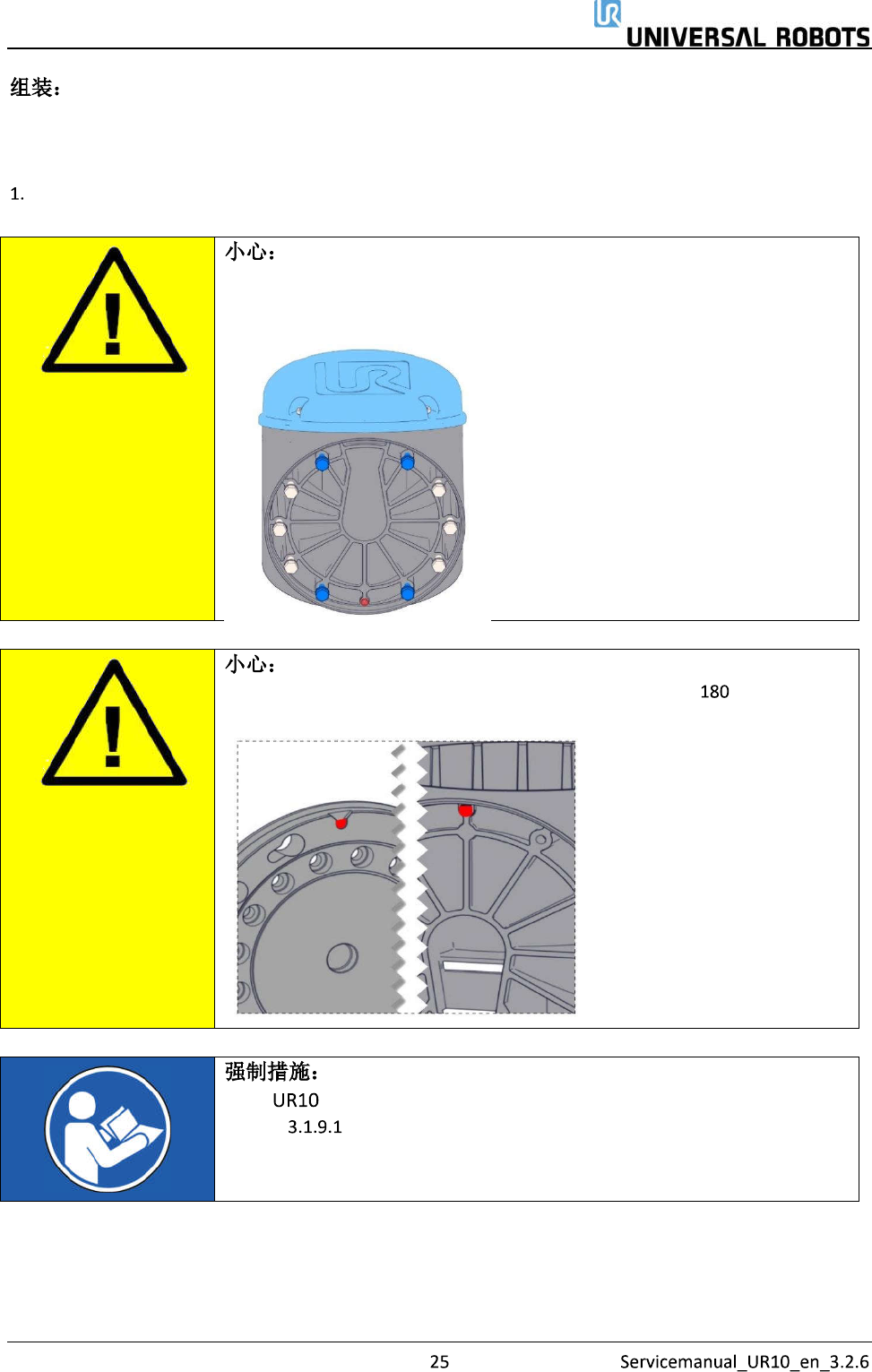
更换关节后,按照以下步骤组装机械臂。
将螺钉和垫圈轻轻插入关节外壳的十个螺纹孔中的每一个(关节很可能已经插入了这些孔)。
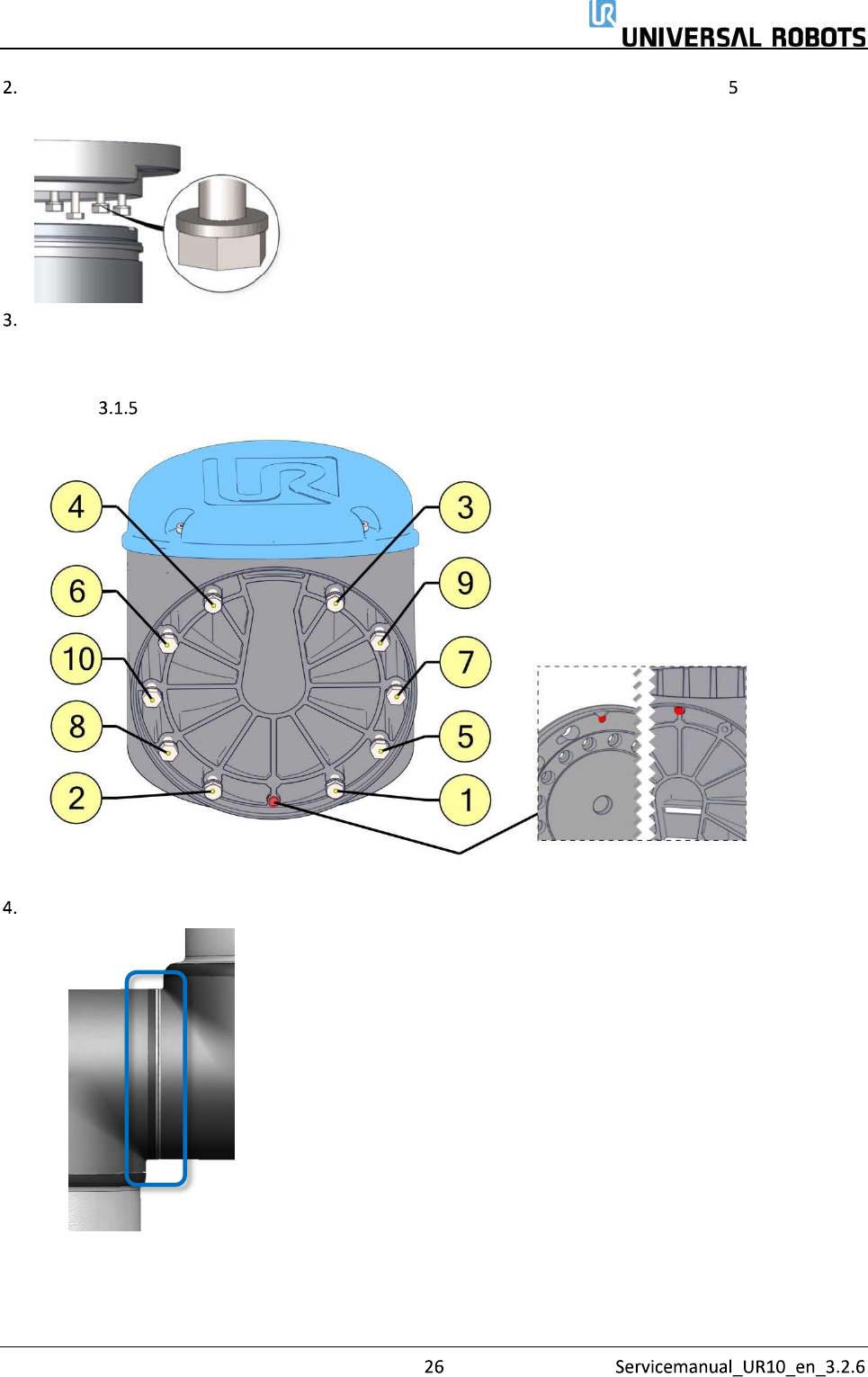
将正确的螺钉放在正确的孔中至关重要。蓝色标记的螺钉比其余的
短。
组装前,对准丝锥应当对准。如果丝锥彼此相对(偏移 度),关节
无法正确合并,且随着时间的推移,关节自身有松动的风险。
确保 肘部锁安装在上臂和肘部关节之间。
请参见 肘部关节—上臂的特殊装配说明
保留所有权利
确保所有垫圈均与螺栓头齐平(这至关重要),然后,顺时针轻轻扭转零件大约 度,直至到达
机械止动位置。
轻轻拧紧螺钉,直到其几乎处于正确位置,然后,交叉拧紧(如下图所示)。
始终从位于对准丝锥的螺钉开始
上紧至正确的扭矩,确保两个面平行。
请参见 扭矩值
将灰色特氟隆环滑动到位,并轻轻地将扁型环放回至特氟隆环的顶部。
保留所有权利
安装定位螺钉(如果有),并拧紧至
至 个整圈,之后连接起来。
(可降低系统中的电气噪声)
将蓝色盖子安装在关节上,并上紧至
继续 双机械臂校准 章节,对机器人进行校准。