ServiceManual_UR10_zh_3.2.6 - 第27页
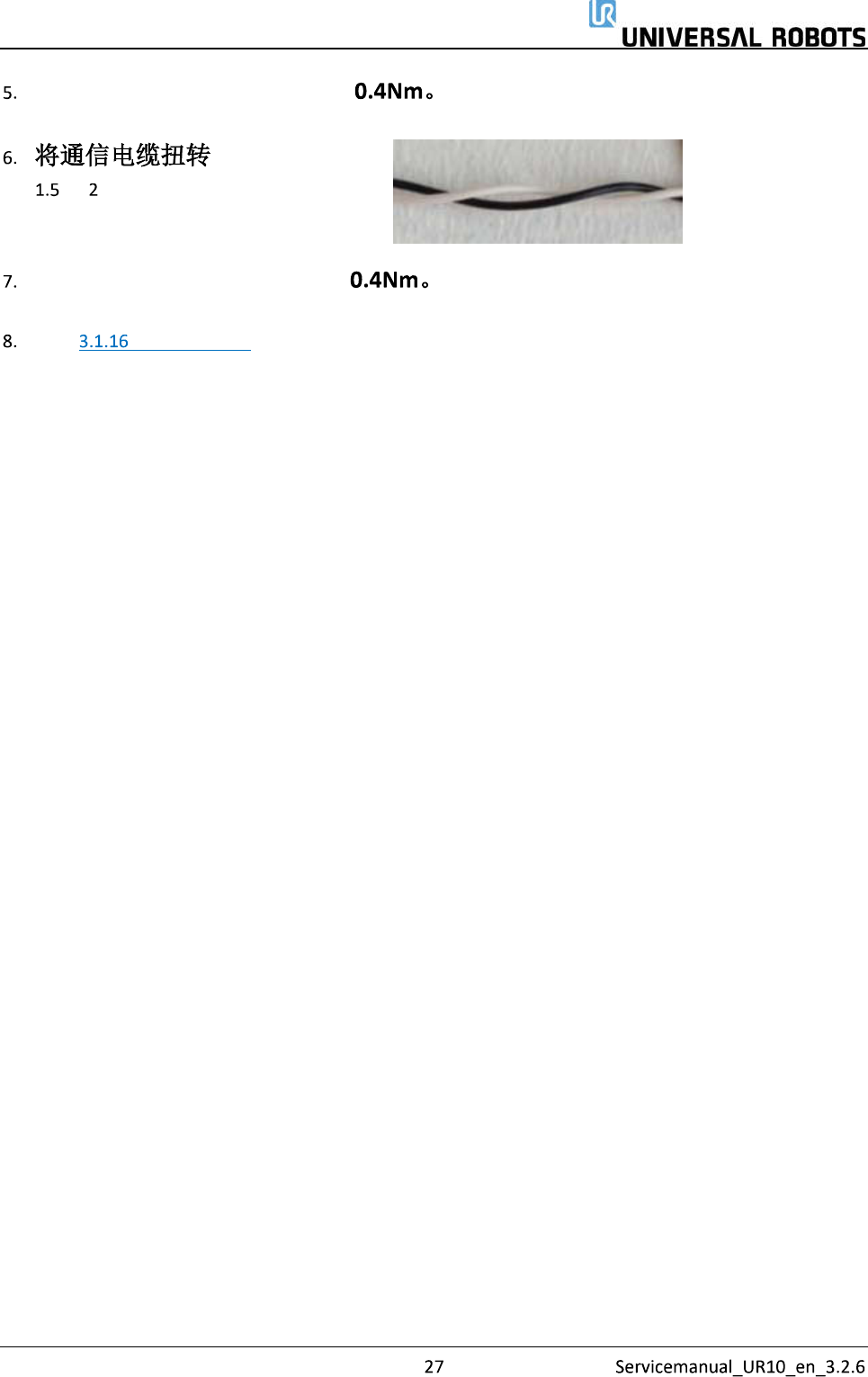
保留所有 权 利 安装定位螺钉( 如果有), 并拧紧至 至 个整圈,之后连 接起来。 (可降低系统 中的电气 噪声) 将蓝色盖子安装 在关节上, 并上紧至 继续 双机械臂 校准 章节,对机器人 进行校准。
保留所有权利
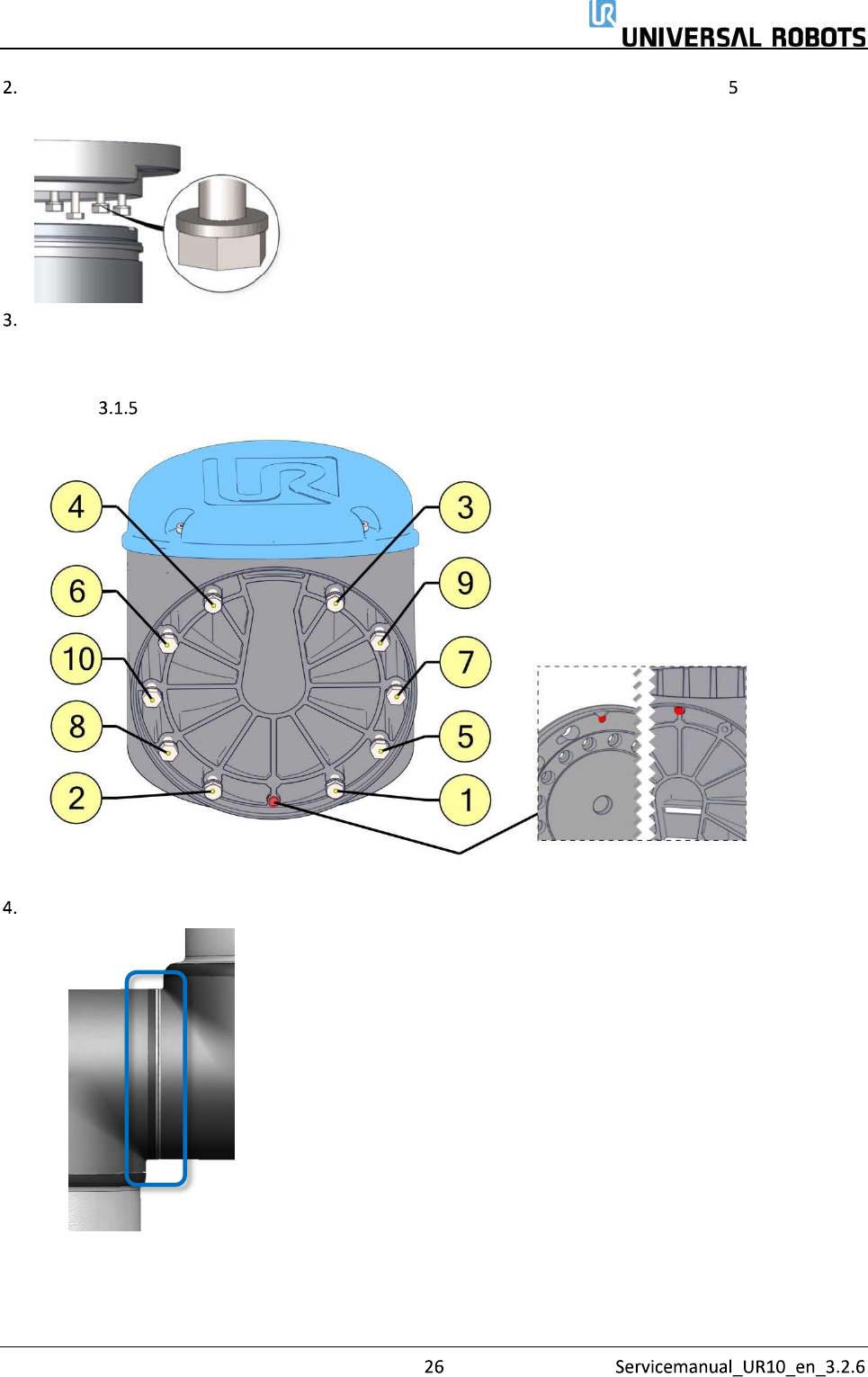
确保所有垫圈均与螺栓头齐平(这至关重要),然后,顺时针轻轻扭转零件大约 度,直至到达
机械止动位置。
轻轻拧紧螺钉,直到其几乎处于正确位置,然后,交叉拧紧(如下图所示)。
始终从位于对准丝锥的螺钉开始
上紧至正确的扭矩,确保两个面平行。
请参见 扭矩值
将灰色特氟隆环滑动到位,并轻轻地将扁型环放回至特氟隆环的顶部。
保留所有权利
安装定位螺钉(如果有),并拧紧至
至 个整圈,之后连接起来。
(可降低系统中的电气噪声)
将蓝色盖子安装在关节上,并上紧至
继续 双机械臂校准 章节,对机器人进行校准。
保留所有权利
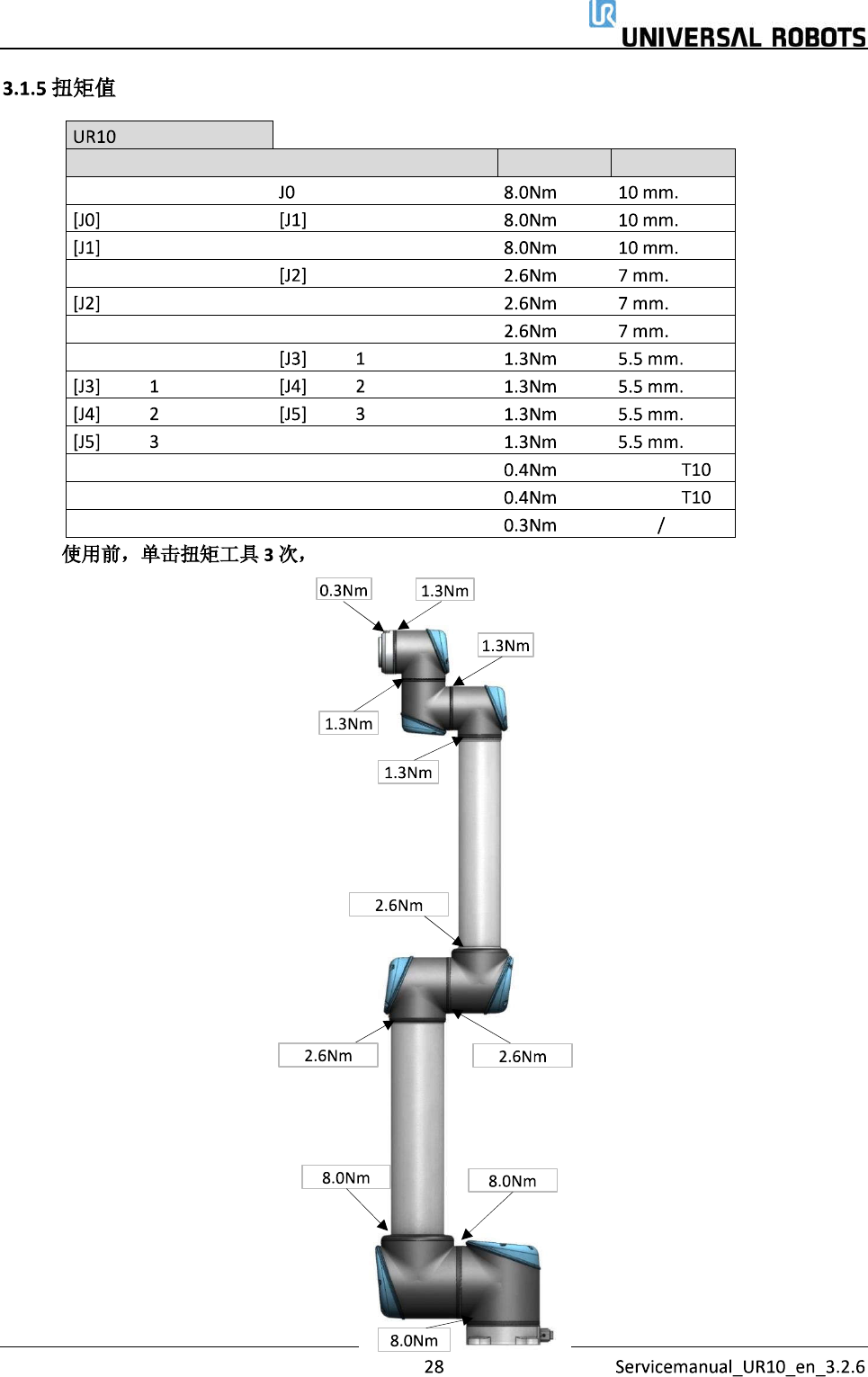
扭矩值
连接 扭矩 头部尺寸
底座安裝支架 底座
底座 肩部
肩部 上臂
上臂 肘部
肘部 肘部计数器零件
肘部计数器零件 下臂
下臂 手腕
手腕 手腕
手腕 手腕
手腕 工具固定托架
对准螺钉 梅花头
蓝色盖子 梅花头
工具连接器 手指 手
注意: 以确保正确的校准扭矩。