ServiceManual_UR10_zh_3.2.6 - 第40页
保留所有 权 利 在插头顶部增加 个锁环。 锁环必须尽量深 地压入。 注意,锁环上的 宽凸起适 合两个螺钉之间的宽槽。 应该不可能插入 错误。 将扁型环放入原 来的位置。 如果扁型环有损坏 松动的迹象 ,必须更换为套 件中提供的扁型 环。
保留所有权利
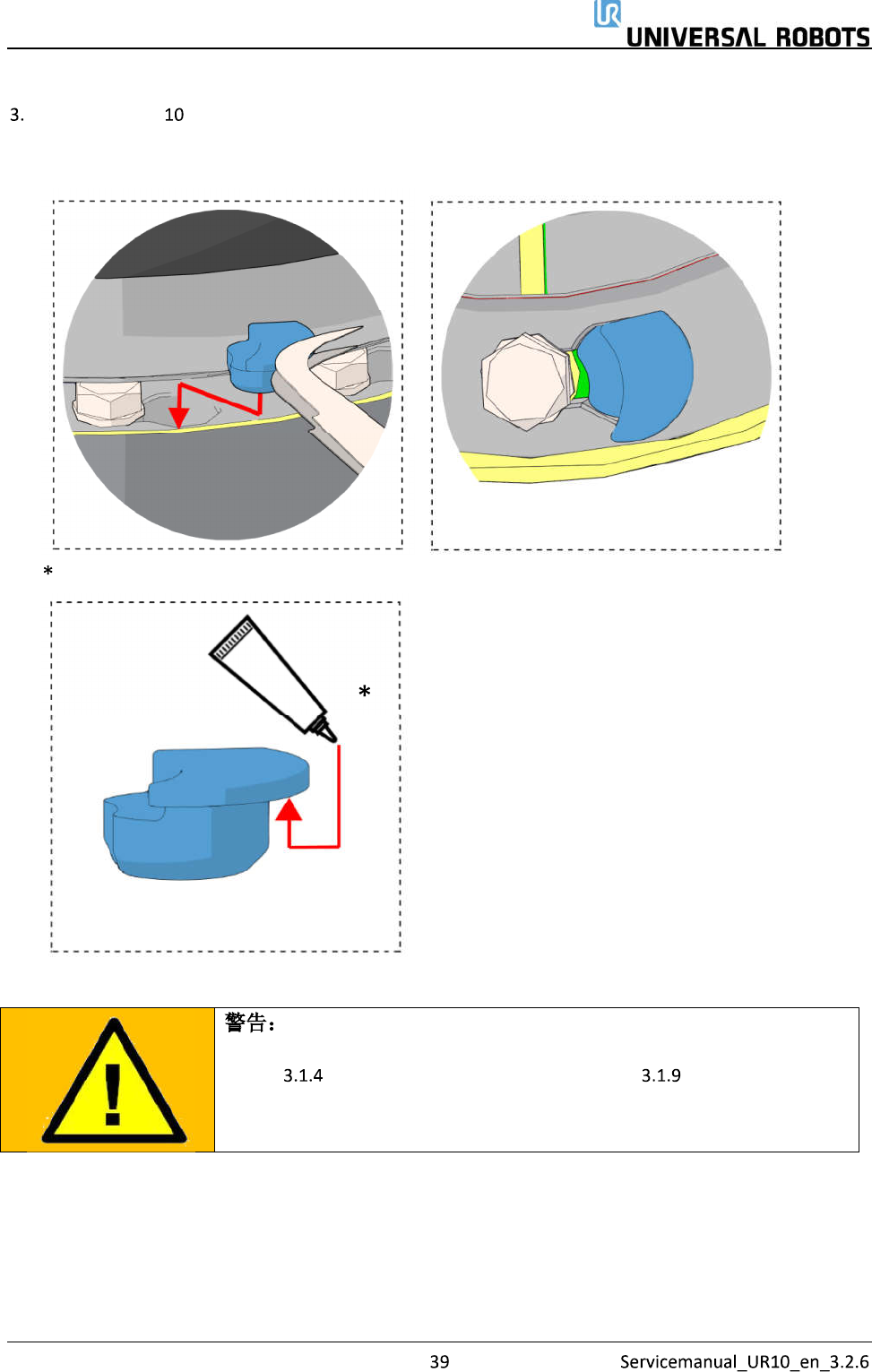
如图所示,在 个锁孔中各插入一个插头。
平面应该朝上,平面上的凹槽应该朝向螺钉。应该不可能插入错误。对于该目的,可以使用镊
子。
机器人定位时,如果肘部不能低于底座关节,可以使用少量硅脂,确保插头保持在原位
如果插头无法安装到孔中,关节可能会错位。必须纠正这种情形。
请参见 将关节与配对关节分离的一般指引、 肘部关节—上臂
保留所有权利
在插头顶部增加 个锁环。锁环必须尽量深地压入。
注意,锁环上的宽凸起适合两个螺钉之间的宽槽。
应该不可能插入错误。
将扁型环放入原来的位置。如果扁型环有损坏 松动的迹象,必须更换为套件中提供的扁型环。
保留所有权利
—
有关详情和照片,请参见: 将关节与配对关节分离的一般指引
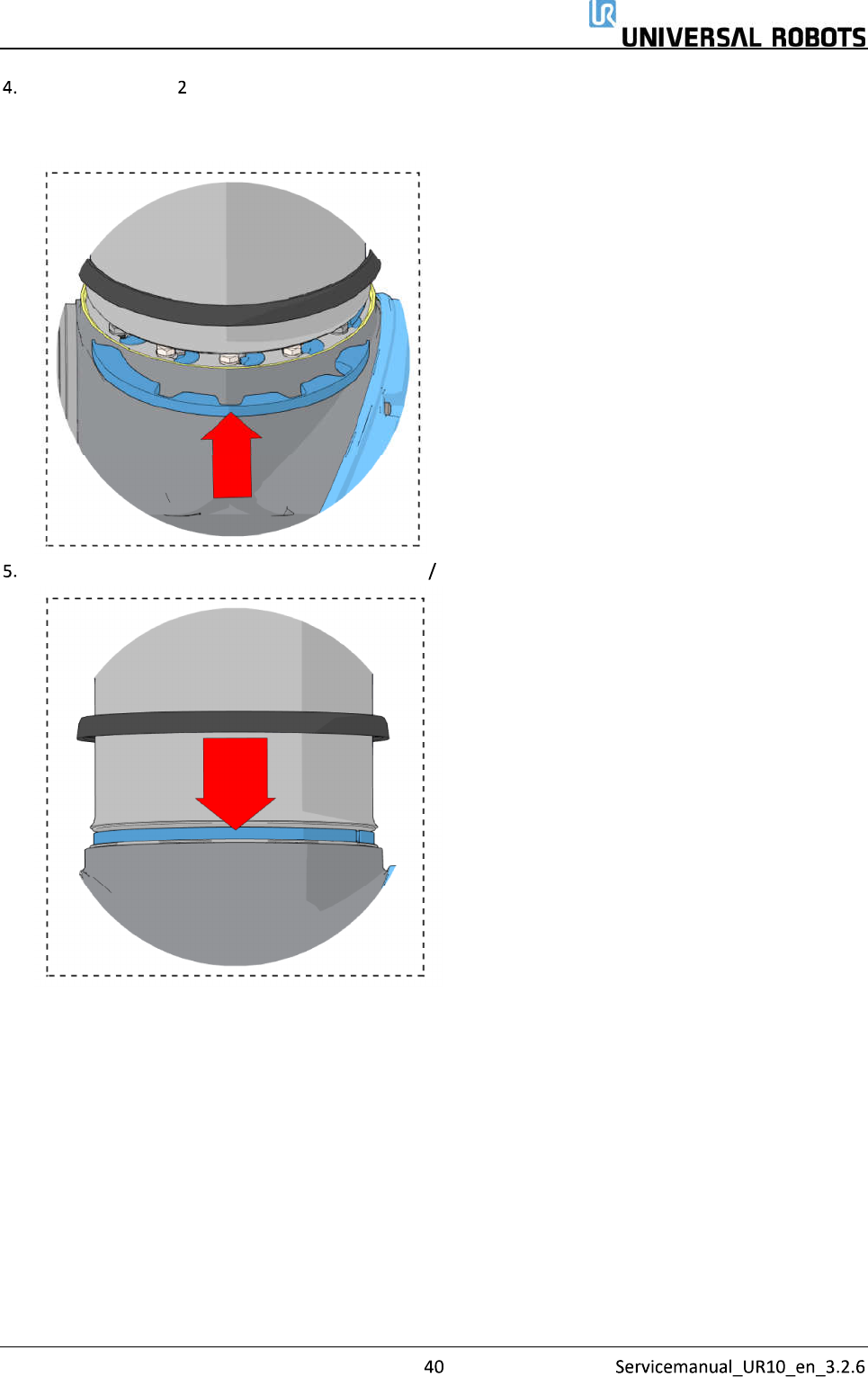
使用螺钉和垫圈,将肘部关节轻轻插入肘部配对的关节。
确保垫圈完全插入并与螺栓头齐平(这至关重要),然后,沿相反方向轻轻扭转零件,直到
达到机械止动。
轻微拧紧 个螺钉,然后,交叉上紧
将灰色特氟隆环滑动到位,并轻轻地将扁型环放回至特氟隆环的顶部。
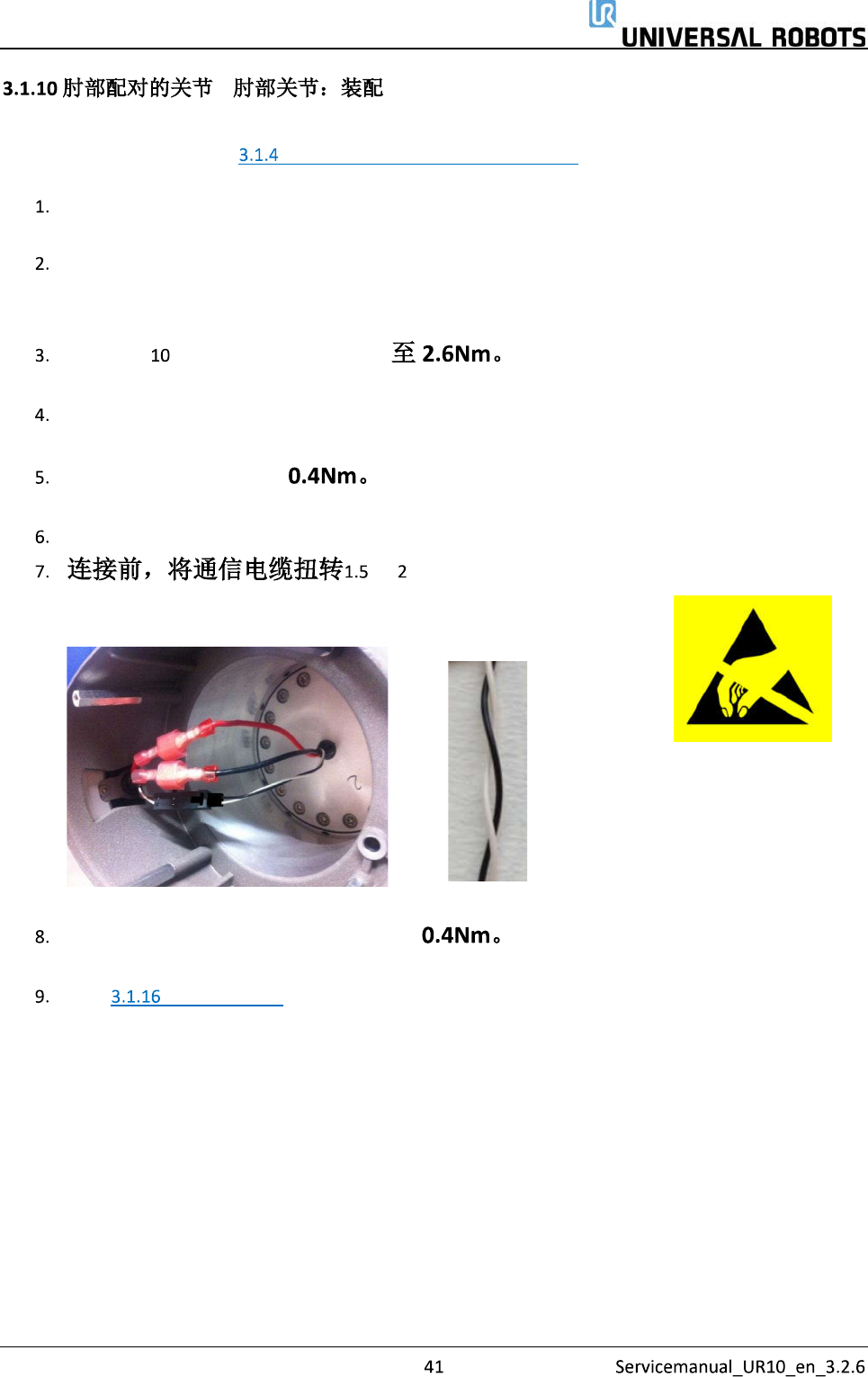
安装定位螺钉,并拧紧至
重新连接 连接器,如图所示。
至 个整圈。
(可降低系统中的电气噪声)
将蓝色盖子安装在肘部关节上,并上紧至
继续 双机械臂校准 章节,对机器人进行校准。