ServiceManual_UR10_zh_3.2.6 - 第48页
保留所有 权 利 更换后,需要校 准新关节 ,以找到正确的零位。 如果可能(准备 好双机械 臂校准套件和相同型号 的第二个机 器人)且需要(需 要尽可能高的位 置精 度,和与关节更 换前示教 位置的最小偏差),请 执行 双机械臂校 准 或者,执行如下 所示的简 单关节校准。 校准关节的说明 : 机器人点动至原 点 图示显示原点位置 ,该位 置定义为所有关节的零位 。 从左向右滑动, 穿过 主屏幕上的 标志。
保留所有权利
–
有关详情和照片,请参见: 将关节与配对关节分离的一般指引
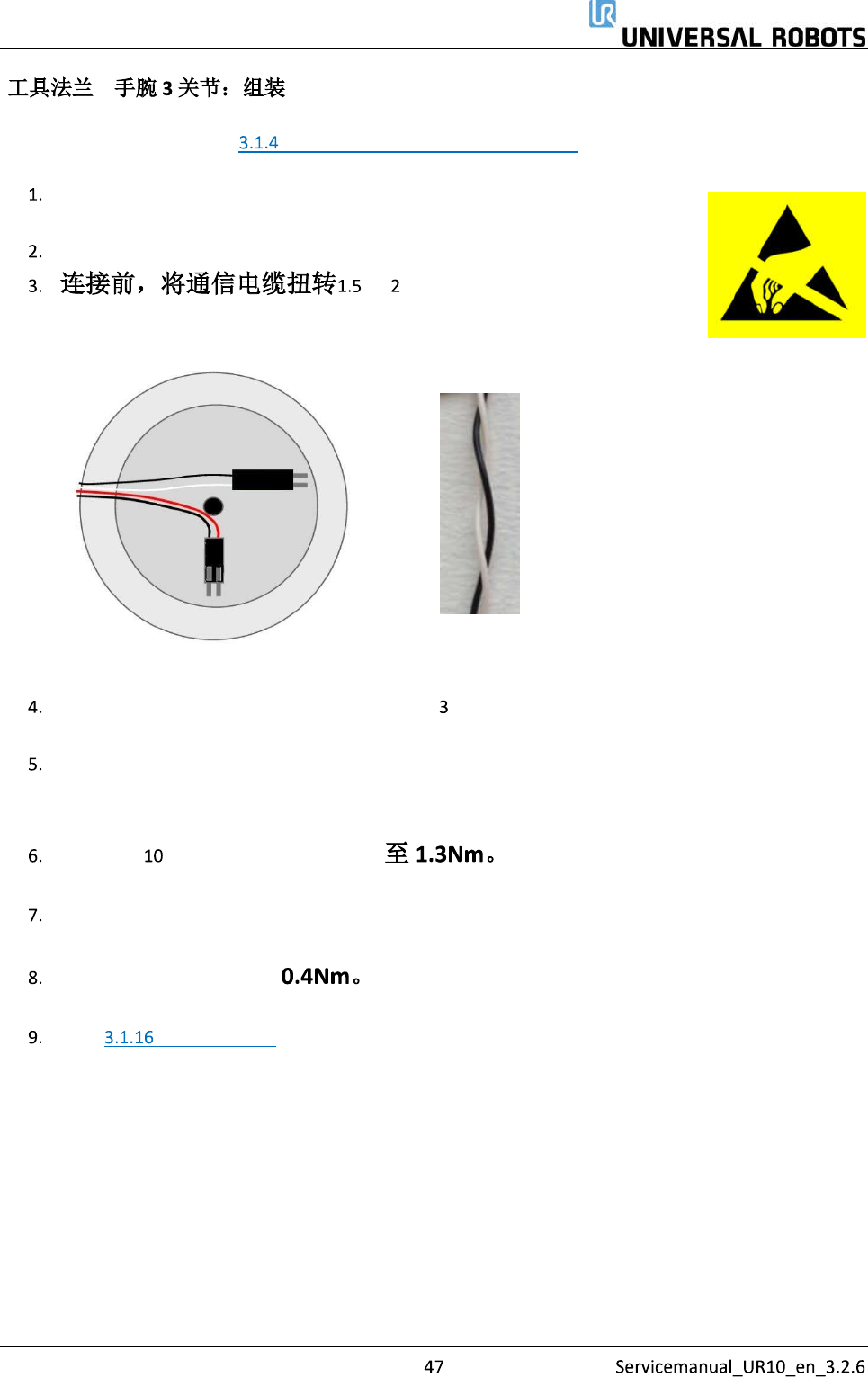
连接防静电腕带
放回工具法兰 ,并重新连接连接器,如图所示。
至 整圈
(可降低系统中的电气噪声)
使用螺钉和垫圈,将工具法兰轻轻插入手腕 关节。
确保垫圈完全插入并与螺栓头齐平(这至关重要),然后,沿相反方向轻轻扭转零件,直到
达到机械止动。
轻微拧紧 个螺钉,然后,交叉上紧
将灰色特氟隆环滑动到位,并轻轻地将扁型环放回至特氟隆环的顶部。
安装定位螺钉,并拧紧至
继续 双机械臂校准 章节,对机器人进行校准。
保留所有权利
更换后,需要校准新关节,以找到正确的零位。
如果可能(准备好双机械臂校准套件和相同型号的第二个机器人)且需要(需要尽可能高的位置精
度,和与关节更换前示教位置的最小偏差),请执行 双机械臂校准
或者,执行如下所示的简单关节校准。
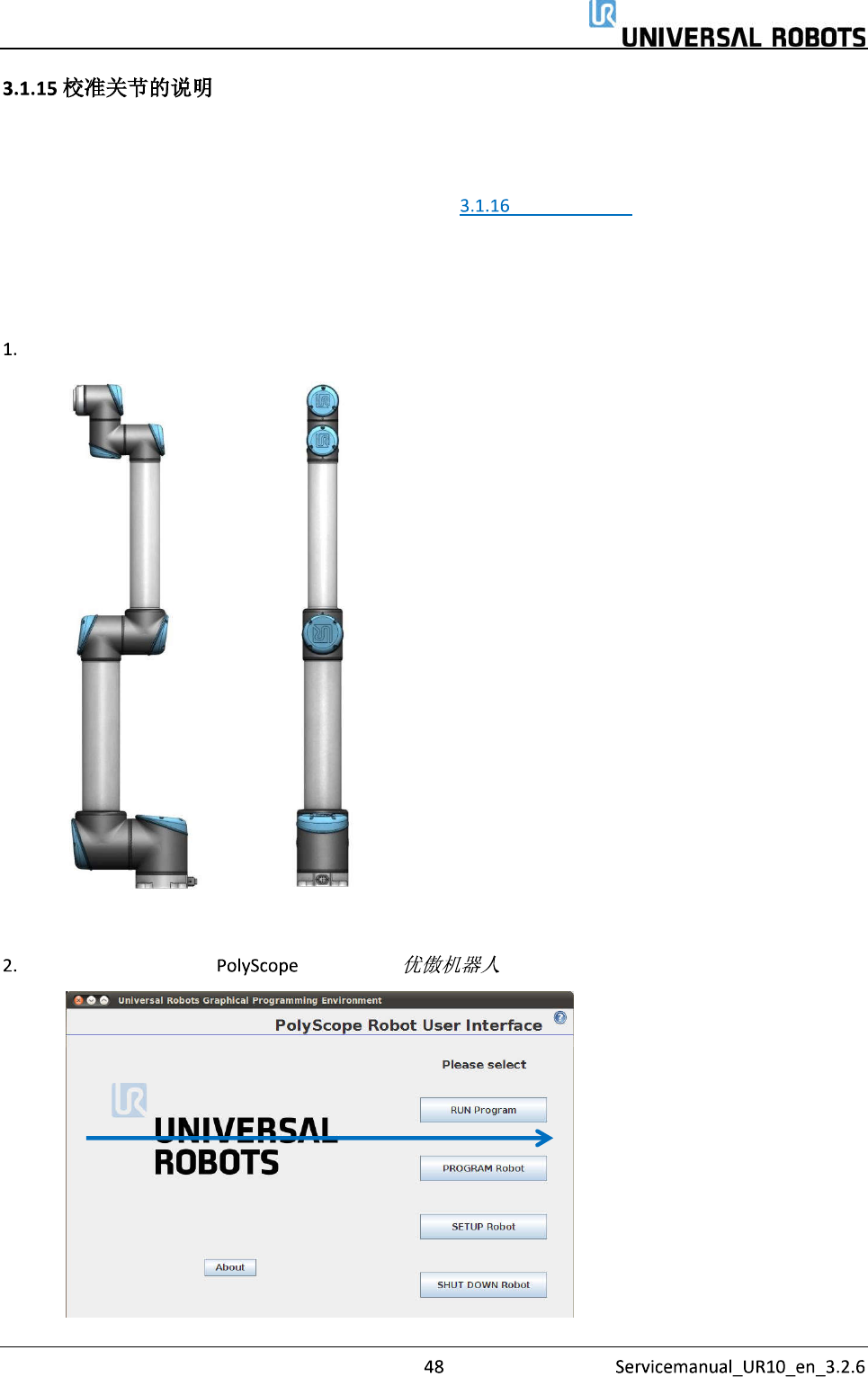
校准关节的说明:
机器人点动至原点
图示显示原点位置,该位置定义为所有关节的零位。
从左向右滑动,穿过 主屏幕上的 标志。
保留所有权利
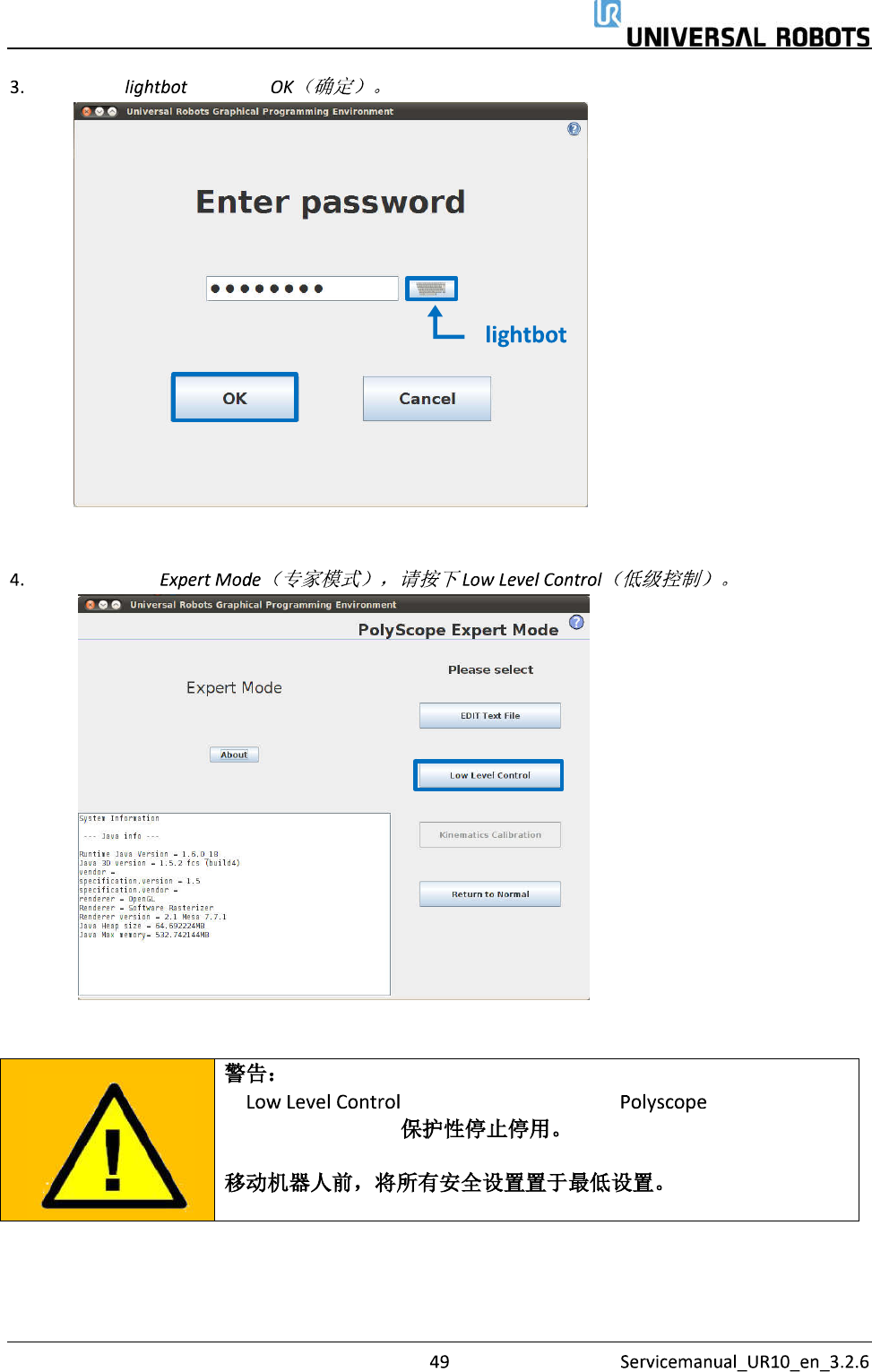
输入密码 ,并按下
现在,您进入
在 (低级控制)中,只有 装置选项卡中
的安全设置活动。