00191755-01 - 第288页
6 Funciones ópticas Instrucciones de uso S IPLACE HS-50 6.6 Probar el componente Versión d e software SR.501.xx Edición 12/99 ES 288 t I I t – Size — corner — lead (ver tabla en el aparte 6.6.4.15 ) o – Row — corner — le…
Instrucciones de uso SIPLACE HS-50 6 Funciones ópticas
Versión de software SR.501.xx Edición 12/99 ES 6.6 Probar el componente
287
t IIt
6.6.4.14 Aclaraciones referentes a la metodología de medición
El centrado de componentes para componentes convencionales con conexiones de patillas se
basa esencialmente en cuatro métodos de medición para determinar la posición (coordenadas X,
Y, Φ = ángulo de giro) del componente y los parámetros de patillas: 6
– Size Mode (Cuerpo)
– Row Mode (Hilera)
– Corner Mode (Esquina)
– Lead Mode (Pin)
Para BGAs (B
all Grid Arrays) y Flip-Chips se implementaron nuevos algoritmos para determinar
la posición (coordenada-X-, -Y, Φ = ángulo de giro) del componente y los parámetros - "Bolita"
(ver aparte 6.6.4.4
, página 261): 6
– Grid Mode (Arreglo)
– Ball Mode (Bolita)
Conforme a sus especificaciones puede omitirse cualquier método de medición en esta secuen-
cia. Una modificación durante el ciclo de esta secuencia no es posible. 6
Definición de los métodos de medición 6
– Cuerpo (Size)
Este método de medición se desarrolló especialmente para componentes pequeños. En base
a la información sobre parámetros dimensionales se determina de forma rápida y segura la
posición y rotación de componentes pequeños.
El proceso es bastante estable a perturbaciones como son las marcas de color.
Size utiliza la formación de perfil. Usted puede ejecutar la formación de perfil a lo largo de la
longitud o el ancho de los componentes. La respectiva selección la puede marcar en el campo
de opción. La formación de perfil se forma como estándar del lado de mayor longitud.
– Hilera (Row)
Este método de medición se basa en la información de una fila de patillas.
Este es bastante rápido y proporciona valores aproximados de las coordenadas y el ángulo
de giro del componente.
– Esquina (Corner) (control del componente)
Los resultados de medición ofrecen una información exacta de las coordenadas y rotación del
componente, el número de patillas, la distribución y el desplazamiento de las filas.
Este método no es sensible a las variaciones de dimensiones de patillas.
– Pin (Lead) (control de patillas)
Con este método la información se obtiene del control de cada una de las patillas.
Se utilizan las siguientes combinaciones de métodos de medición:
6 Funciones ópticas Instrucciones de uso SIPLACE HS-50
6.6 Probar el componente Versión de software SR.501.xx Edición 12/99 ES
288
t IIt
– Size — corner — lead (ver tabla en el aparte 6.6.4.15) o
– Row — corner — lead (ver tabla en el aparte 6.6.4.15)
– Arreglo (Grid) (control de componentes en máquinas automáticas 80F
4
o 80F
5
)
Los resultados de medición suministran informaciones sobre las coordenadas y giro aproxi-
mados del componente. Además obtiene una información sobre la calidad de la medición.
– Bolita (Ball) (determinación de la posición de la "bolita" en máquinas automáticas 80F
4
o 80F
5
)
Los resultados de medición ofrecen datos exactos sobre la posición y el ángulo de giro del
componente. Además obtiene una información sobre el desplazamiento máximo de la "bolita"
y la calidad de la medición.
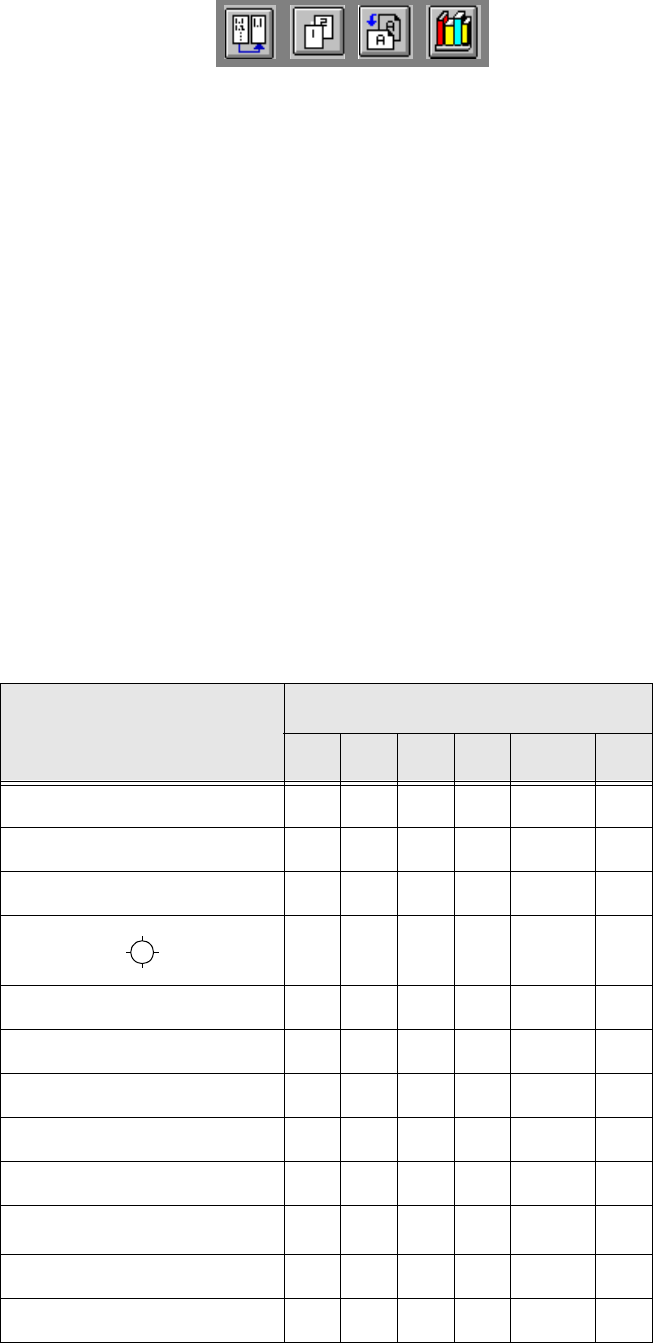
6.6.4.15 Recomendaciones para una secuencia óptima de métodos de medición
En las siguientes tablas le ofrecemos recomendaciones de la secuencia óptima de métodos de
medición para componentes: En ello son válidas las siguientes abreviaturas: 6
B = ball (Bolita) C = corner (Esquina) G = grid (Arreglo)
L = lead (Pin) R = row (Hilera) S = size (Cuerpo) 6
*) L para componentes irregulares con ventanas independientes 6
Componente
Secuencia de medición
S R G C L B
MELF S L
CHIP S L
SOT S C L
SL
SOJC6 S C
SOJC14 R C
LCC R C L
PLCC R C L
QFP R C L
TAB R C L
*)
BGA, Flip-Chip S G B
Bare dies S
Instrucciones de uso SIPLACE HS-50 6 Funciones ópticas
Versión de software SR.501.xx Edición 12/99 ES 6.6 Probar el componente
289
t IIt
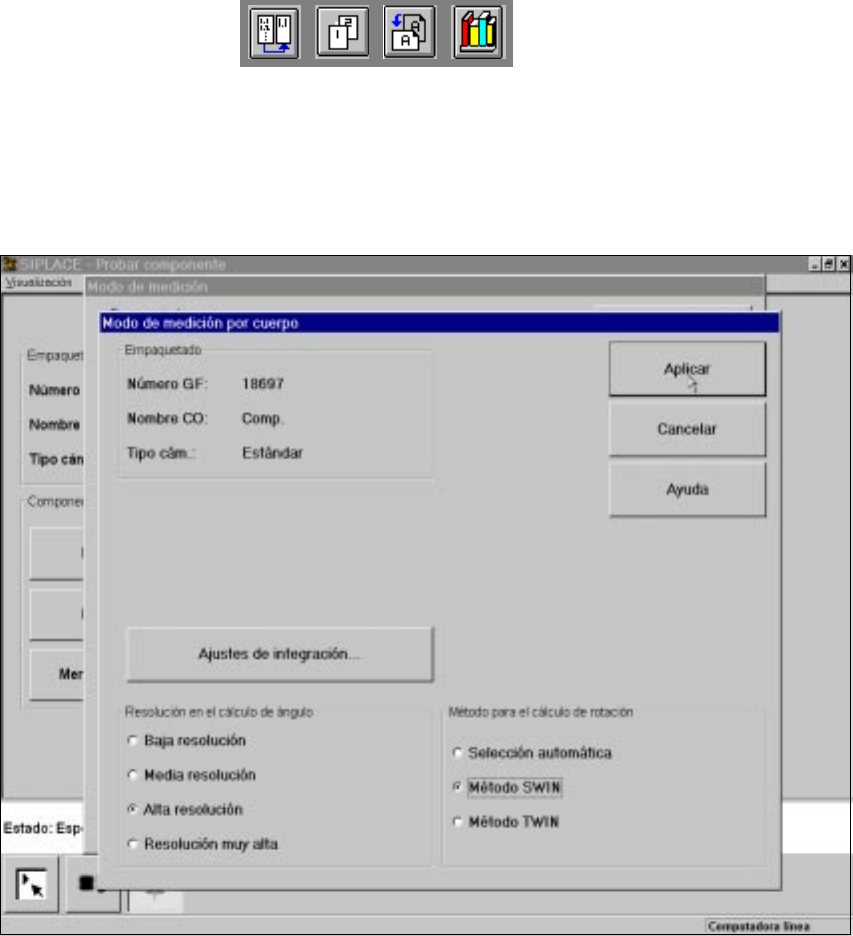
6.6.4.16 Modo de medición "Cuerpo" (Size)
Después de hacer clic en el botón "Ajustar" del modo de medición "Cuerpo" se visualiza el menú
"Modo de medición por cuerpo" en la pantalla. 6
6
Fig. 6.6 - 35 Opción "Modo de medición", menú "Modo de medición por cuerpo"
En este menú tiene la posibilidad de 6
– variar la resolución del cálculo angular.
– fijar el método para el cálculo de rotación y
– variar los ajustes de integración.
Resolución del cálculo angular 6
Si en este modo de medición se determina de forma incorrecta el giro del componente debido a
ambigüedad, usted puede aumentar la resolución angular para determinar el ángulo de giro. En
dependencia de la resolución se utilizan para la determinación angular del componente los
siguientes pasos: 6
– Componente sencillo: baja resolución
– Componente complejo alta resolución