JUKI_2050说明书_.pdf - 第353页
第 5 堂 其 它功能 RfivO3 5-6^2 设置组 5-6-2T 激 光传感 器高度 设置从 基板上 方看 到的各 激光传 感器的 高度. 当 频繁发 生激光 识别措 误盹. 请检 情生产 程序的 “北 件数 据”, 然 k 直新设 置机器 设置的 KA TC 吸 嘴配置 ”。说 无 改善, 清重 新设置 “激 光传 感器高 度*. 重新 设置“ 激光传 感器高 度” 后, 务必重 新设置 UTC 吸嘴配 置”. (设 置向尚 废…
第
5
堂
其
它功能
RfivO3
5-6
自
动校准
用自
动校港
M
对
机器的
部分基
本设置
储息州
参数域
行变
更.
A
如
果设置
错误,
有可能
出现误
动作。
注意
在
进行设
置时,
请与
本公司
商洽后
再进行
操作二
5-6-1
概要
用
自动校
准设
置的项
I
!
如下表
所示「
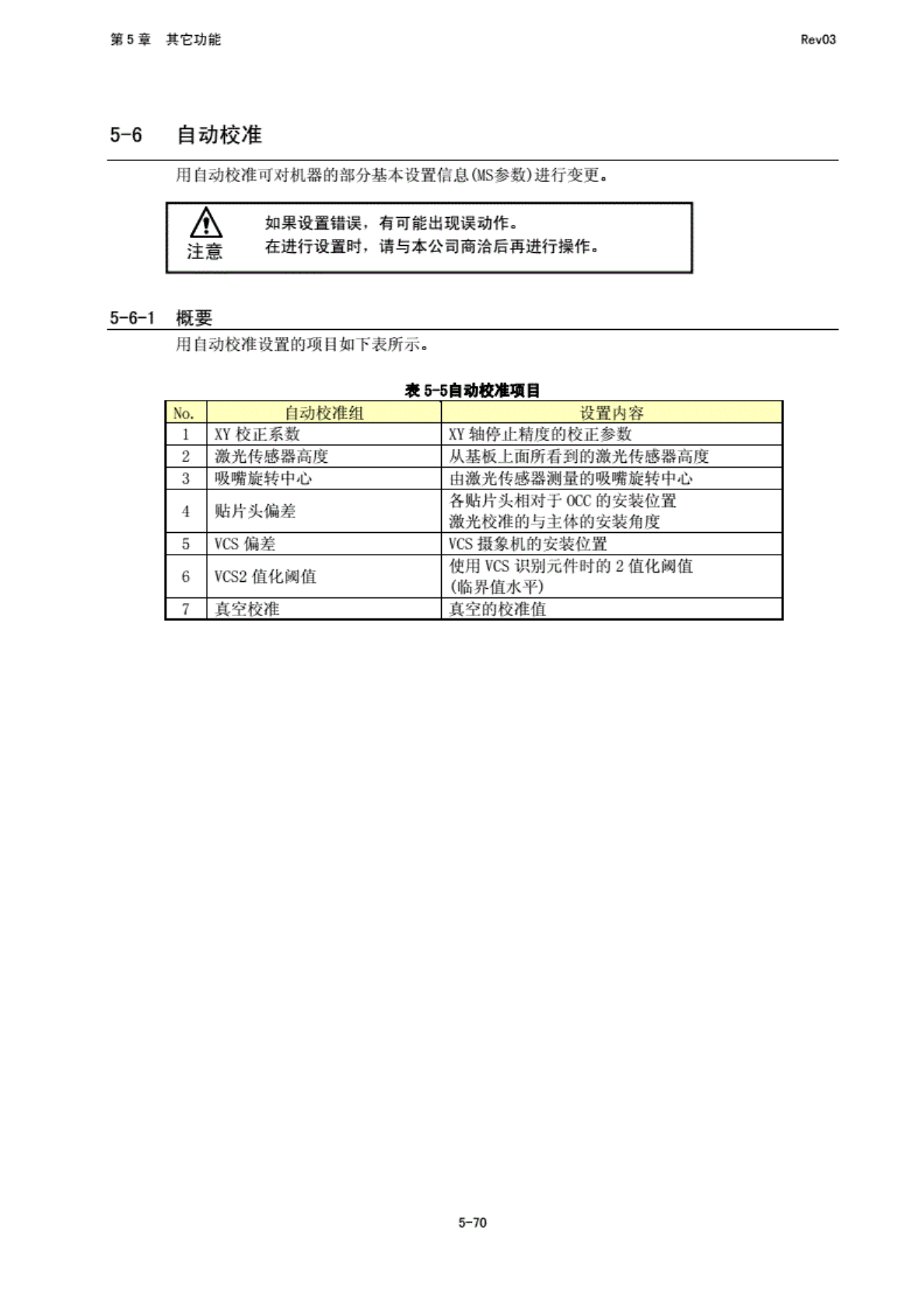
表
5~5
自动
目
Nd
白动
校睢组
设置
内容
1
虹校
正系数
XY
轴停止
精度的
校
正参数
2
激光
传感器
高度
从基
板」:
面所
看到
的
激光传
感那尚
度
3
吸嘴旋
传中心
由激光
传感器
测量的
吸嘴旋
转中心
4
贴片
头偏差
各
贴片头
相对于
OCC
的安
装位置
激光
段淮的
与主:
体的安
装角度
5
VCS
偏差
收
5
摄象机
行安装
位置
6
VCS2
值化
网值
使用
VCS
识别元
件时的
2
值化
网值
(临
界值
水平)
7
真空
校席
真空的
校推值
5-70
第
5
堂
其
它功能
RfivO3
5-6^2
设置组
5-6-2T
激
光传感
器高度
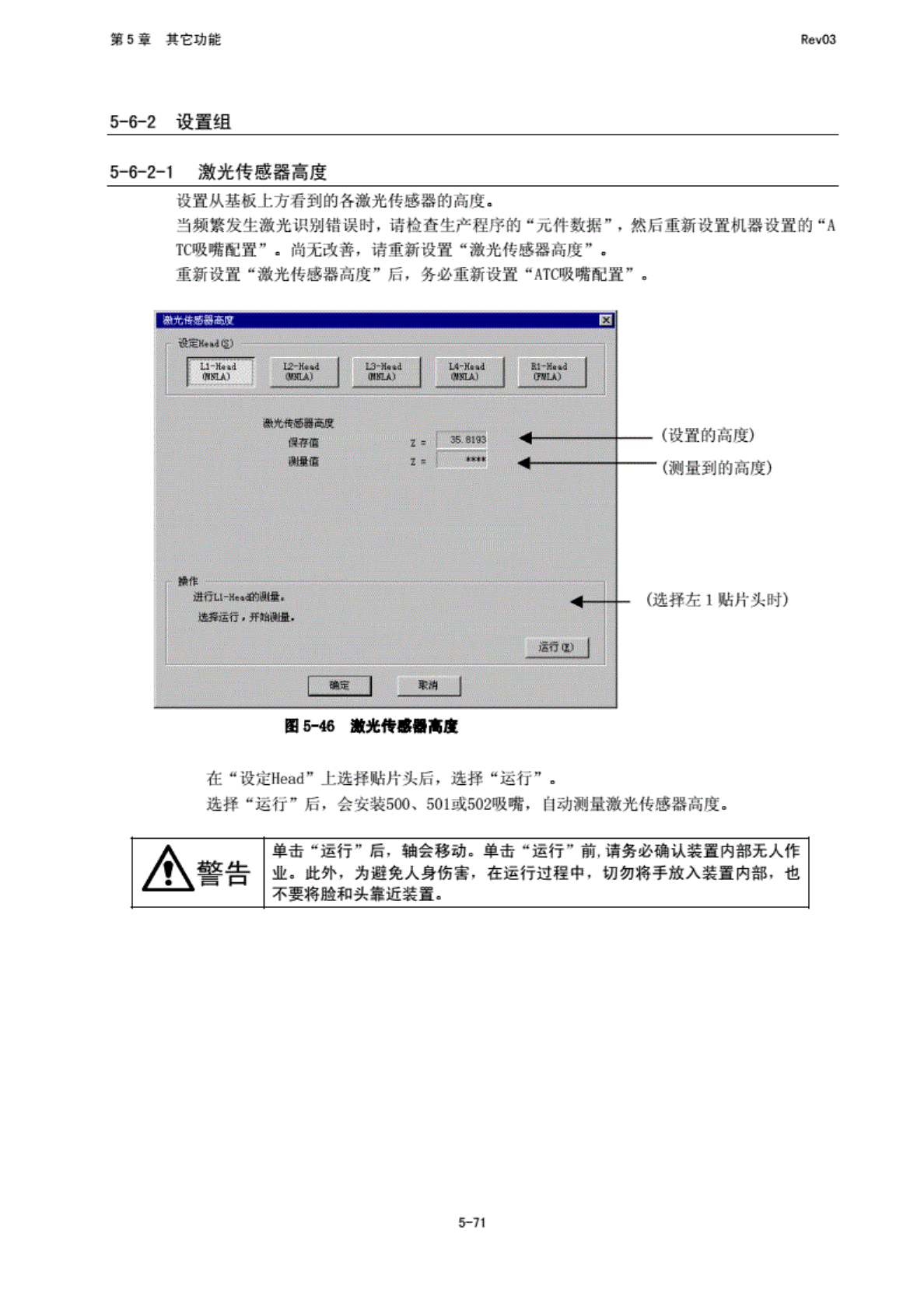
设置从
基板上
方看
到的各
激光传
感器的
高度.
当
频繁发
生激光
识别措
误盹.
请检
情生产
程序的
“北
件数
据”,
然
k
直新设
置机器
设置的
KA
TC
吸
嘴配置
”。说
无
改善,
清重
新设置
“激
光传
感器高
度*.
重新
设置“
激光传
感器高
度”
后,
务必重
新设置
UTC
吸嘴配
置”.
(设
置向尚
废)
(测
量到的
高度)
(选
择左
1
贴片
头时)
图6婷
激
光得想
后高度
在
.设定
Head"
上选择
贴片头
好,
选择
“运
行
”
.
选择"
运行
"后
,会
安装
500、
和
1
或
302
吸嘴,
自动测
量激光
传感器
高度。
单击
“运
行”
后,
轴会
移动‘
单击
“运
行”
前,
请务必
确认装
置内部
无人作
业.
此外,
为避
免人身
饬害,
在
运行过
程中,
切匆
将手放
入装置
内部,
也
不要
将脸和
头靠近
装置。
5-71
第
5
至
其它
:功能
RfivOS
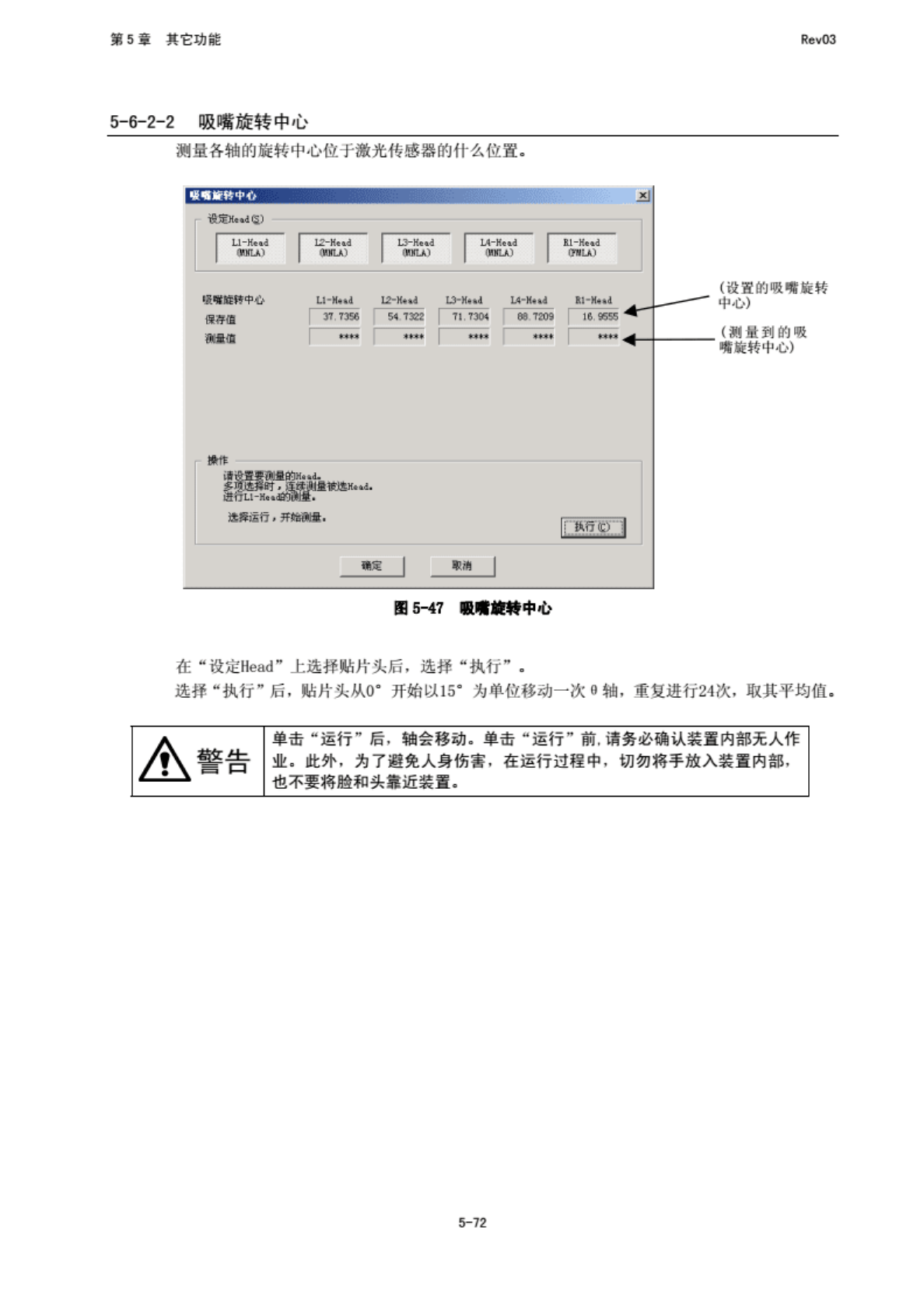
5-6-2-2
吸嘴旋
转中心
测
量各轴
的旋转
中心位
于激光
传感器
的什么
位置.
《测
量到
的粒
嘴旋转
中心)
(设置
的吸
嘴旋转
中心)
图
577
吸/
im
中心
在
”设定
Head”
上选
择贴片
共后,
选择
"执
行"
.
选择
“执行
”后,
贴
片头从
1
开始以
15。
为
单位移
动一次
9
轴,
重登
进行2
4
次,
取其平
均值.
出警告
单击
”运
行”
后,
轴会
移动.
单击
“运
行”
前,
清务必
确认装
置内部
无人作
业.
此外,
为了避
免人身
伤害,
在
运行过
程中,
切匆
将手放
入装置
内部,
也不要
招脸和
头靠近
装置。
5-72