JUKI_2050说明书_.pdf - 第357页
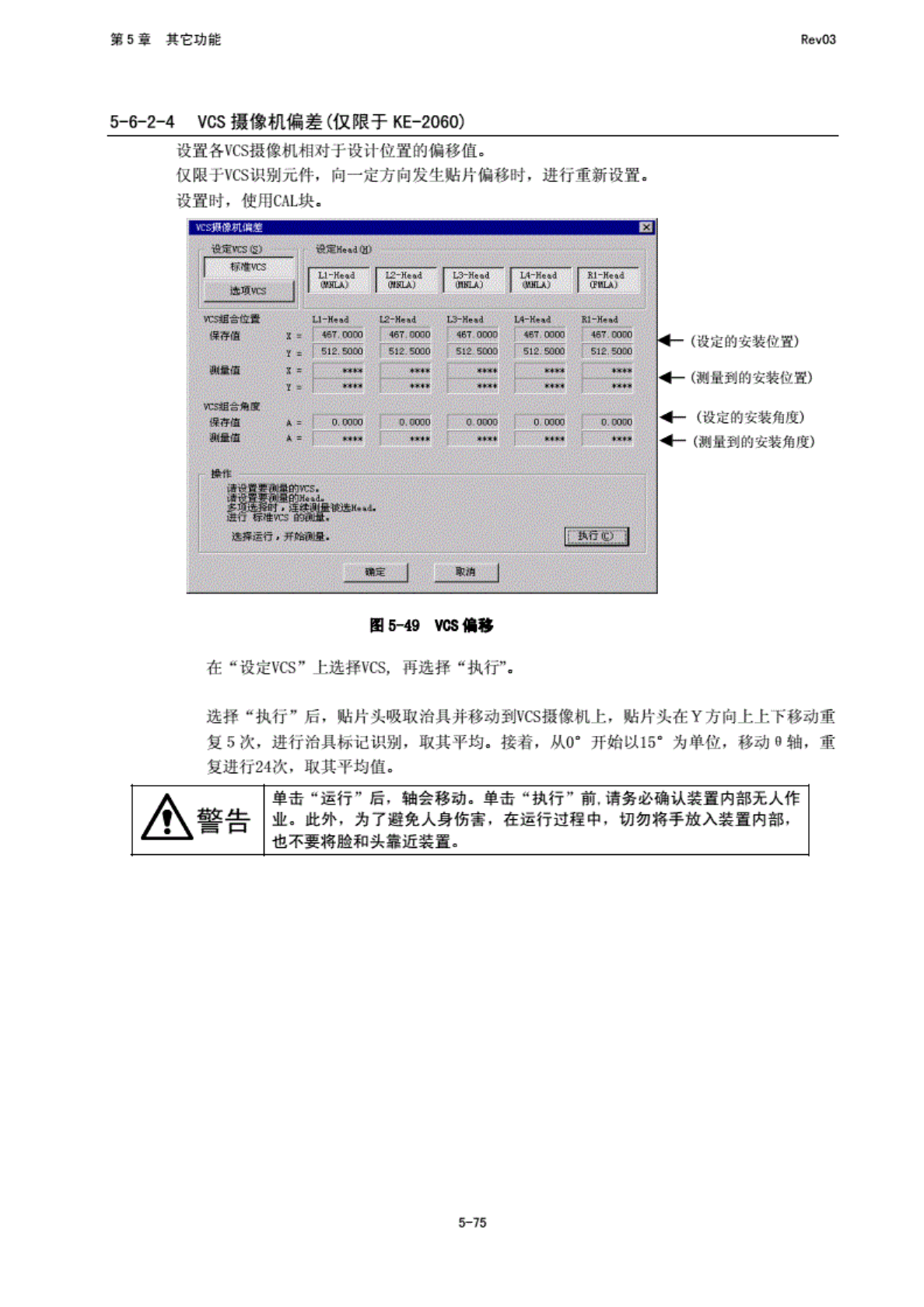
第 5 堂 其 它功能 RfivO3 ,一 (设定 的安装 位置) -一 知 1 量利的 安装 位置》 + 《设定 的安装 角度) v 一 源 g 注到的 安装用 度) 5-6-2-4 MCS 摄像 机偏差 (仅 限于 KE-2060) 设置各 yCS 摄像机 相对于 设汁位 置的偏 移值. 但限于 YCS 识别 元件 ,向 一定方 向发生 贴片偏 程时. 进 行重新 设置。 设 置时, 使用 CAL 块。 fflE-49 VCS 催移…

第
5
堂
其
它功能
RfivO3
OCC
来识别
治具的
位置.
此时
,’若
相对
F
校
正跳的
位置,
偏差为
绝对值
1
加以
上时即
出错.
出
错肘,
有可
能必须
重
新设置
MS
参数。
©
重
复④到
(的
操作
,使
吸取
治具前
的设定
Head
从
0"
开始以
450
为
单位一
边转动
8
轴,
反
复说几
取其平
均值.
5-74
第
5
堂
其
它功能
RfivO3
,一
(设定
的安装
位置)
-一
知
1
量利的
安装
位置》
+
《设定
的安装
角度)
v
一
源
g
注到的
安装用
度)
5-6-2-4
MCS
摄像
机偏差
(仅
限于
KE-2060)
设置各
yCS
摄像机
相对于
设汁位
置的偏
移值.
但限于
YCS
识别
元件
,向
一定方
向发生
贴片偏
程时.
进
行重新
设置。
设
置时,
使用
CAL
块。
fflE-49
VCS
催移
在
“设
定院并
上选择
YCS.
再选择
“执
行”.
选择
“执行
”后.
贴片头
吸取
治具井
移的到
WS
摄像
机上
,贴
片头在
Y
方向
上上再
移动重
费
5
快.
进行
治具拉
i
己识
别.
取其
平均.
接着,
从
0。
开始以
150
为
单位,
移确
9
轴,
重
复进行
24
次,
取其
平均噪
.
后警告
单击
“运
行”
后.
轴会
移幼.
单击
“执
行”
前,
请务必
确认装
置内部
无人作
业.
此外,
为了避
免人身
痛害,
在
运行过
程中,
切匆
招手放
入装置
内部,
也不要
将脸和
头靠近
装置.
5-75
第
5
堂
其
它功能
RfivO3
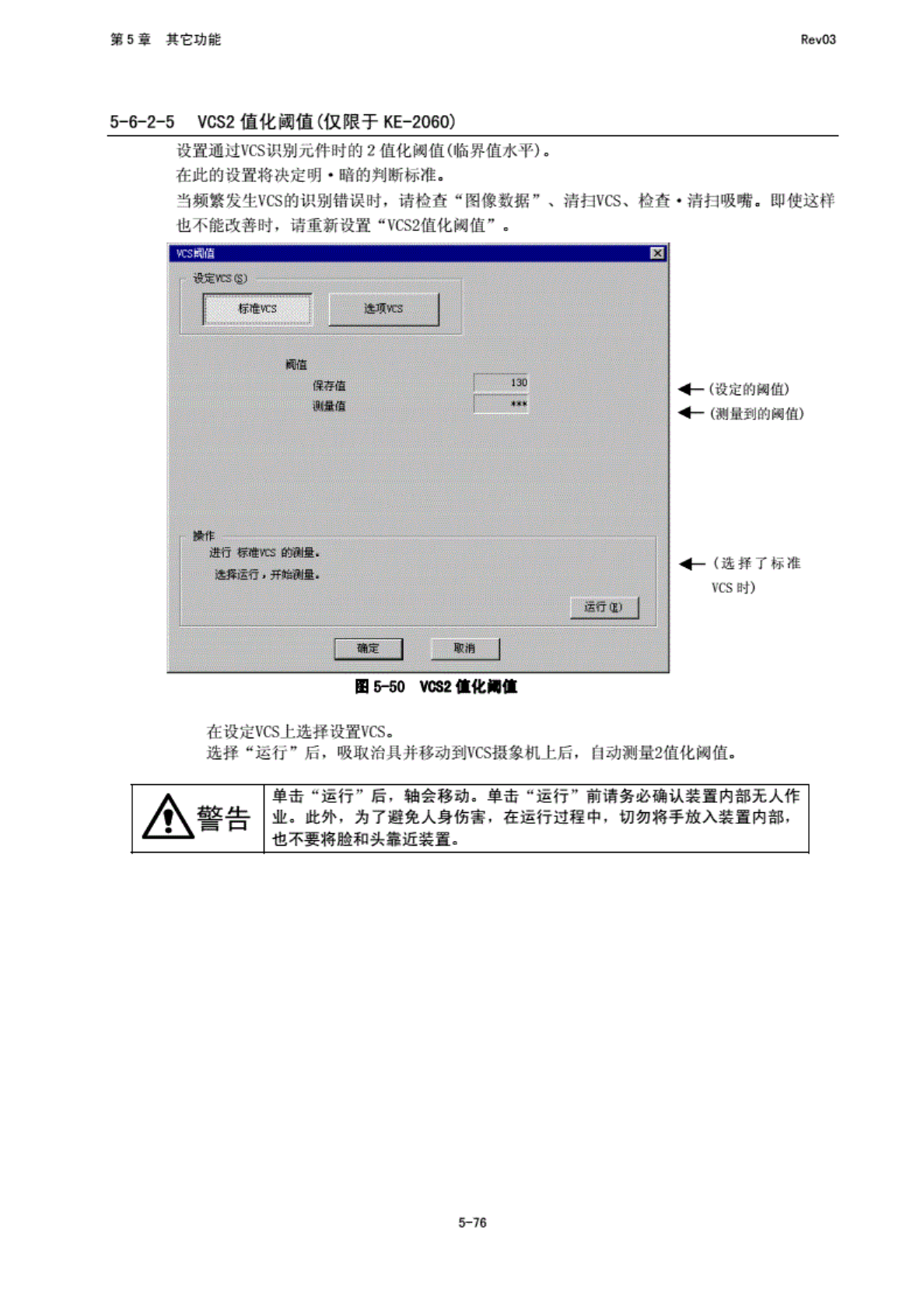
5
一七2-
5
VCS2
值
化阈值
(仅
限于
KE-2060)
注
置通过
VCS
识别
死件
时的
2
值
化阈值
(临
界值水
平)
.
花此的
设置将
决定明
•
此
的判断
标准二
当频
繁发生
VCS
的识
别错
误时,
请检直
“图像
数据”
、
清
EVCS、
检查
,清也
吸嘴.
即使这
样
也
不能改
善时,
请重
新设置
“VCS2
值
化阈值
"二
B5-50
候
2
值
化周值
—
(设
定的
M
值)
*一
(:
割量
到的
田值)
十
《选择
了标唯
YCS
时)
在设定
ICS_E
选择设
置忙心
选择
“运行
”后.
吸取
治具并
移动到
YCS
摄
象机上
后,
自
动测量
2
值化
阈值.
企警告
单击
“运
行”
后,
轴会
移动.
单击
“运
行”
前清
务必确
认装
置内部
无人作
曲.
此外,
为了避
免人身
伤害,
在
运行过
程中,
切匆
将手放
入装置
内部,
也
不要将
脸和
头非近
装置.
5-76