1_3_TR7700_SIII_Series_Software_ch-v2.4_20140515 - 第76页
Test Research, Inc. 60 TR7700 SIII Series User G uide – Software 圖 91 : CorMath 框參數設定畫面 硬體設定: 燈光:選擇使用均勻光 、錫形燈源 、低角度燈源 或者白燈,預設為 白燈。 比對條件: 相似度:設定待測影像 與標準影像的相似 度標準值。當待測物與標準值的 相似度低於 設定值,即視為不良。 演算法與對應的條件屬性 : 影像模式:…
Test Research, Inc.
TR7700 SIII Series User Guide – Software 59
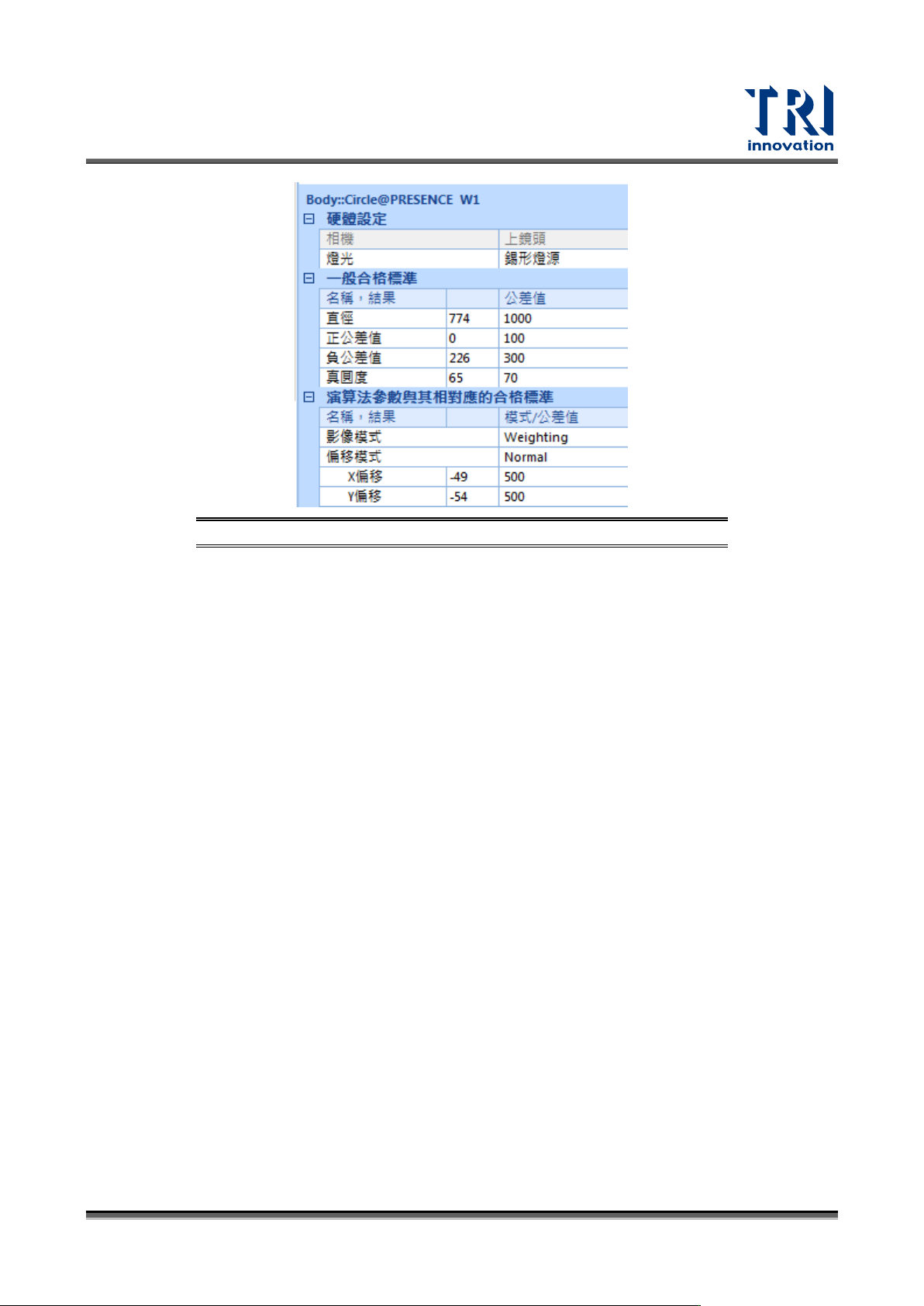
圖 90:Circle 框參數設定畫面
硬體設定:
相機:選擇使用哪個角度的相機,此機種只能選擇上鏡頭。
燈光:選擇使用均勻光、錫形燈源、低角度燈源或者白燈,預設為均勻光。
比對條件:
直徑:設定直徑的標準尺寸(單位為 μm)。
正/負公差值:設定待測物直徑量測結果與標準直徑值的差異(單位為 μm)。當小於設定
值視為合格。
真圓度:設定真圓度,為檢測圓的最大半徑減最小半徑差值(單位為 μm)。當檢測結果
小於設定值視為合格。
演算法與對應的條件屬性:
影像模式:選擇影像的比對方式為權重法或色彩空間法,預設為權重法。
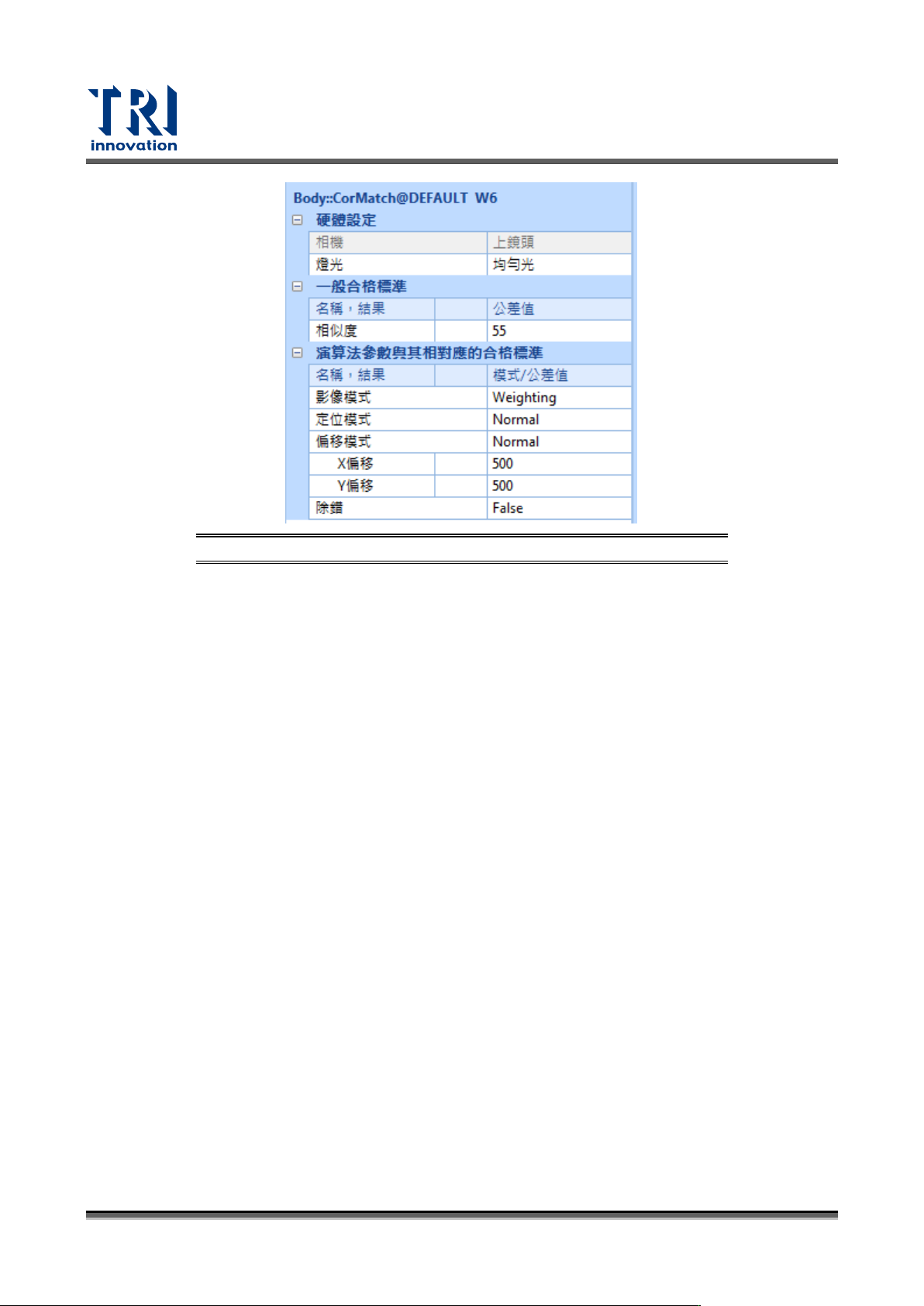
3.7.5 CorMatch 框
用途:主要用來檢查 IC 腳之缺件、偏移、腳彎與 0201 尺寸以下 Chip 元件的缺件、損件、偏
移、立碑、極性。
檢測原理:利用影像中一個個畫素的灰階值比對來計算其相似度。
參數畫面與說明:
Test Research, Inc.
60 TR7700 SIII Series User Guide – Software
圖 91:CorMath 框參數設定畫面
硬體設定:
燈光:選擇使用均勻光、錫形燈源、低角度燈源或者白燈,預設為白燈。
比對條件:
相似度:設定待測影像與標準影像的相似度標準值。當待測物與標準值的相似度低於
設定值,即視為不良。
演算法與對應的條件屬性:
影像模式:選擇影像的比對方式為權重法或色彩空間法,預設為權重法。
定位模式:區分為 Normal 及 Warp 模式,Normal 即一般檢測,Warp 為定位補償,
Fail 時不會顯示在測試視窗。
偏移模式:選擇使用 Normal、ShiftXY 或 Boundary 模式來測試位移。
Normal:可以個別設定 X 方向與 Y 方向的偏移公差值。
ShiftXY:設定 X 與 Y 方向的總位移量(X、Y 位移的平方根)的公差值。
Boundary:設定一個邊界作為檢測時的判定基準。當勾選此選項時,參數設定的
ShiftX 與 ShiftY 會變成 Boundary/X 與 Boundary/Y。當檢測結果超出此範圍時視
為不良。
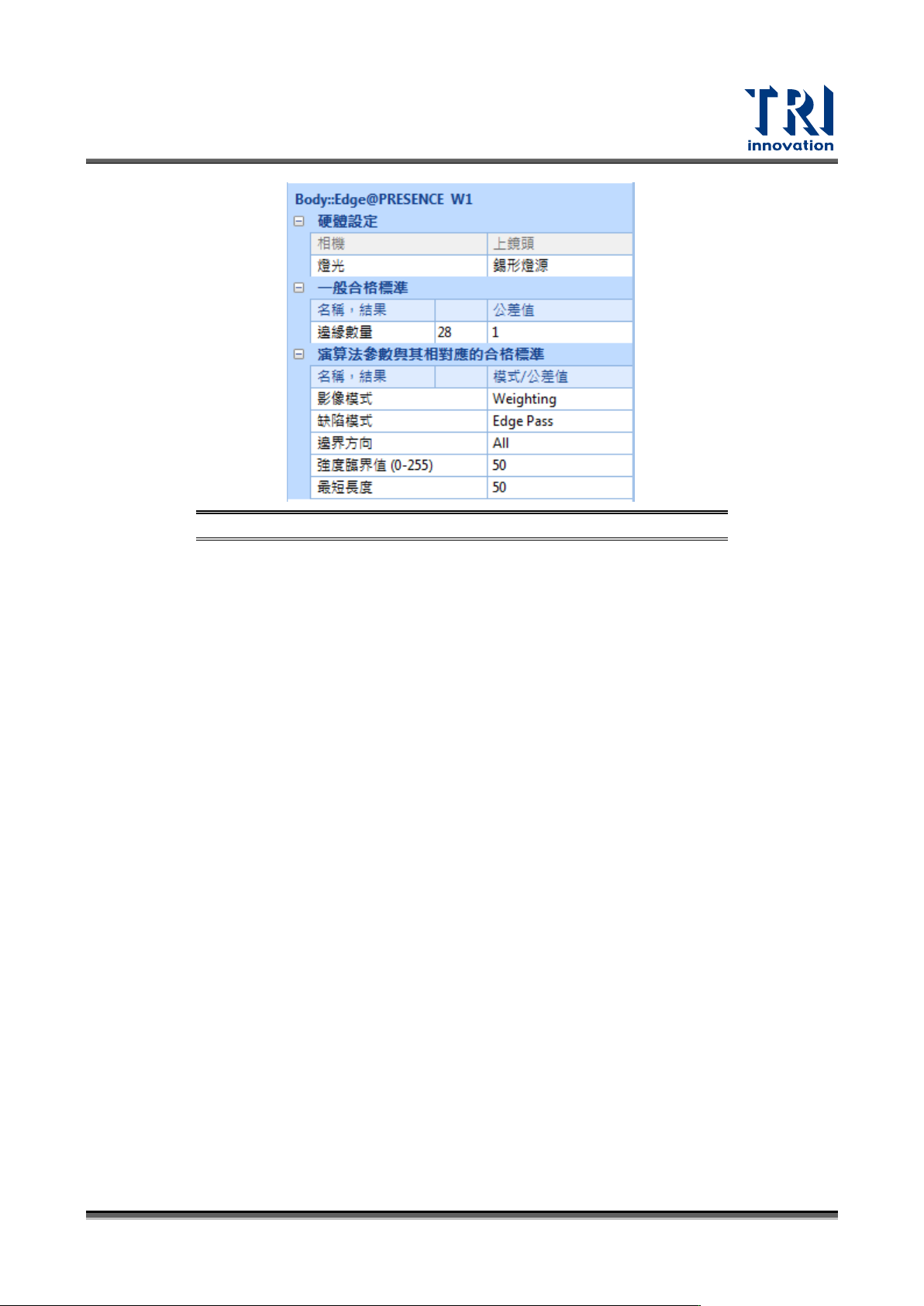
3.7.6 Edge 框
用途:用來檢測元件的邊緣缺陷。
檢測原理:利用影像中的色彩來計算元件的邊緣數量。
參數畫面與說明:
Test Research, Inc.
TR7700 SIII Series User Guide – Software 61
圖 92:Edge 框參數設定畫面
硬體設定:
相機:選擇使用哪個角度的相機,此機種只能選擇上鏡頭。
燈光:選擇使用均勻光、錫形燈源、低角度燈源或者白燈,預設為錫形燈源。
比對條件:
邊界數量:設定檢測框內的邊界數量的公差值,公差值預設為 1。
演算法與對應的條件屬性:
影像模式:選擇影像的比對方式為權重法、色彩空間法、RGB 法,預設為權重法。
偵測模式:設定有邊界為合格或者不良。
邊界方向:設定檢測的方向,有 All、Horizontal 和 Vertical 三種可以選擇。
強度臨界值 (0-255):設定強度臨界值。當值設定越小,靈敏度會越高(雜訊會增加)。
最短長度:設定邊界最小的長度。若檢測值長度小於設定值的邊界將不列入計算。
3.7.7 Lead 框
用途:用來檢查 IC 腳的缺件、偏移、腳彎或腳翹。
檢測原理:利用 IC 腳其頭端、尾端與 Pad 的色彩來進行定位。
參數畫面與說明: