00191369-02.pdf - 第290页
6 Vision functions User M anual HS-50 6.6 Test Component Software V ersion SR.501.xx 12/99 Issue U S 290 t I I t The followi ng combi nation s of meas ureme nt methods are u sed: 6 – Size — corne r — lead (see table in S…

User Manual HS-50 6 Vision functions
Software Version SR.501.xx 12/99 Issue US 6.6 Test Component
289
t IIt
6.6.4.14 Information on Measurement Modes
As far as conventional components with lead connections are concerned, component centering is
essentially based on four measurement methods used to determine the position (X and Y-coordi-
nates, Φ = skew) of the component and the lead parameters: 6
– Size mode
– Row mode
– Corner mode
– Lead mode
For BGAs (B
all Grid Arrays) and flip-chips new algorithms have been implemented in order to de-
termine the position (X and Y-coordinates, Φ = skew) of the component and the ball parameters
(see Section 6.6.4.4
on page 263 ): 6
– Grid mode
– Ball mode
In accordance with your specifications any measurement method can be omitted from this se-
quence. However, it is not possible to change the way this sequence runs. 6
Definition of the measuring methods 6
– Size
This measurement method has been especially developed for small components. On the basis
of the information on dimension parameters the position and rotation of small components is
determined rapidly and reliably.
This method is very resistant to unwanted intrusive elements such as ink markings.
The size mode also employs profiling. You can have the profile formed along either the width
or
the length of the component. You should make your choice within the options field. The de-
fault selection is for profiling along the longer side.
– Row
This measurement method is based on information from one row of leads.
This method is very fast and supplies approximate values for the coordinates and rotational
angle of the component.
– Corner (Component inspection)
The measurement results provide precise information on the coordinates and rotation of the
component, the number of leads, the pitch and the row offset.
This method is not sensitive to fluctuations in the lead dimensions.
– Lead (Leads inspection)
This method is used to obtain information from an inspection of every single lead.
6 Vision functions User Manual HS-50
6.6 Test Component Software Version SR.501.xx 12/99 Issue US
290
t IIt
The following combinations of measurement methods are used: 6
– Size — corner — lead (see table in Section 6.6.4.15
) or
– Row — corner — lead (see table in Section 6.6.4.15
)
– Grid (component inspection with the 80F
4
or 80F
5
machines)
The measurement results will provide information on the approximate coordinates and approx-
imate rotation of the component. In addition, you will be informed of the quality of measure-
ment.
– The measurement results will provide precise information on the approximate coordinates and
approximate rotation of the component. In addition, you will be informed of the maximum ball
offset and the quality of measurement.
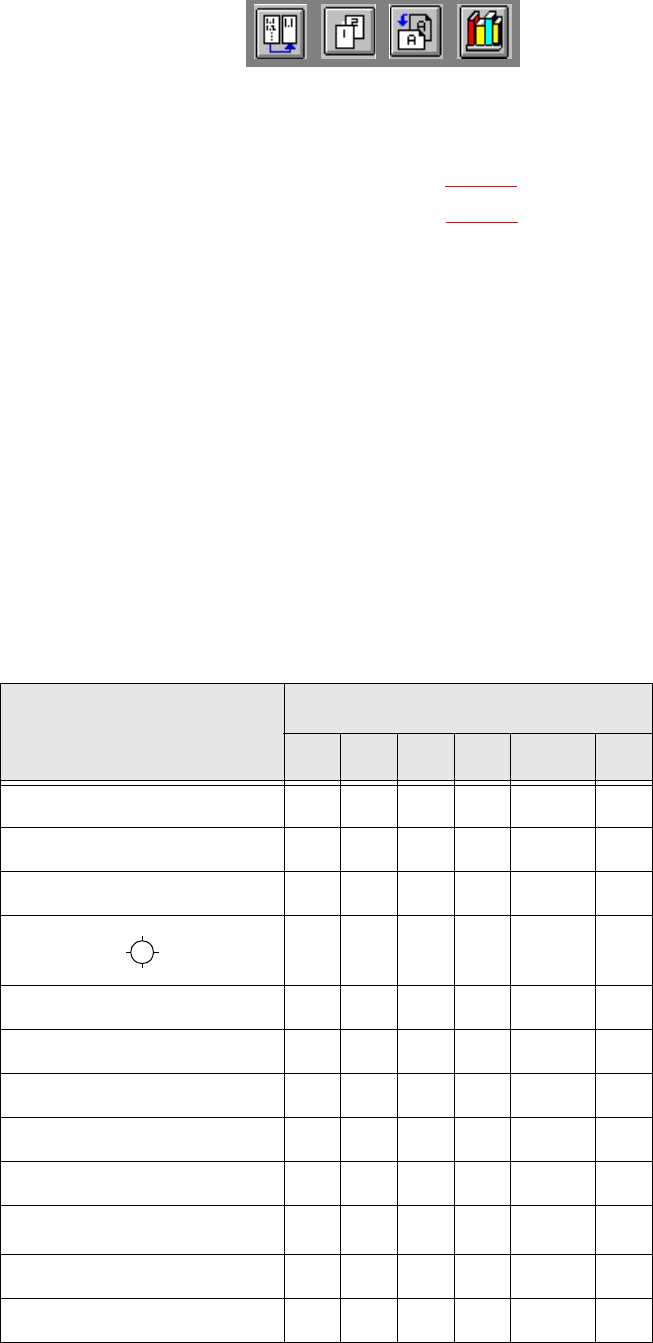
6.6.4.15 Recommendations regarding the Optimum Sequence of Measurement Methods
The following table contains our recommendations for the optimum sequence of measurement
methods for particular components. The following abbreviations are used: 6
B = ball C = corner G = grid
L = lead R = row S = size
*)
L applies to irregularly shaped components with separate windows 6
Component
Measurement sequence
S R G C L B
MELF S L
CHIP S L
SOT S C L
SL
SOJC6 S C
SOJC14 R C
LCC R C L
PLCC R C L
QFP R C L
TAB R C L
*)
BGA, flip-chip S G B
Bare dies S
User Manual HS-50 6 Vision functions
Software Version SR.501.xx 12/99 Issue US 6.6 Test Component
291
t IIt
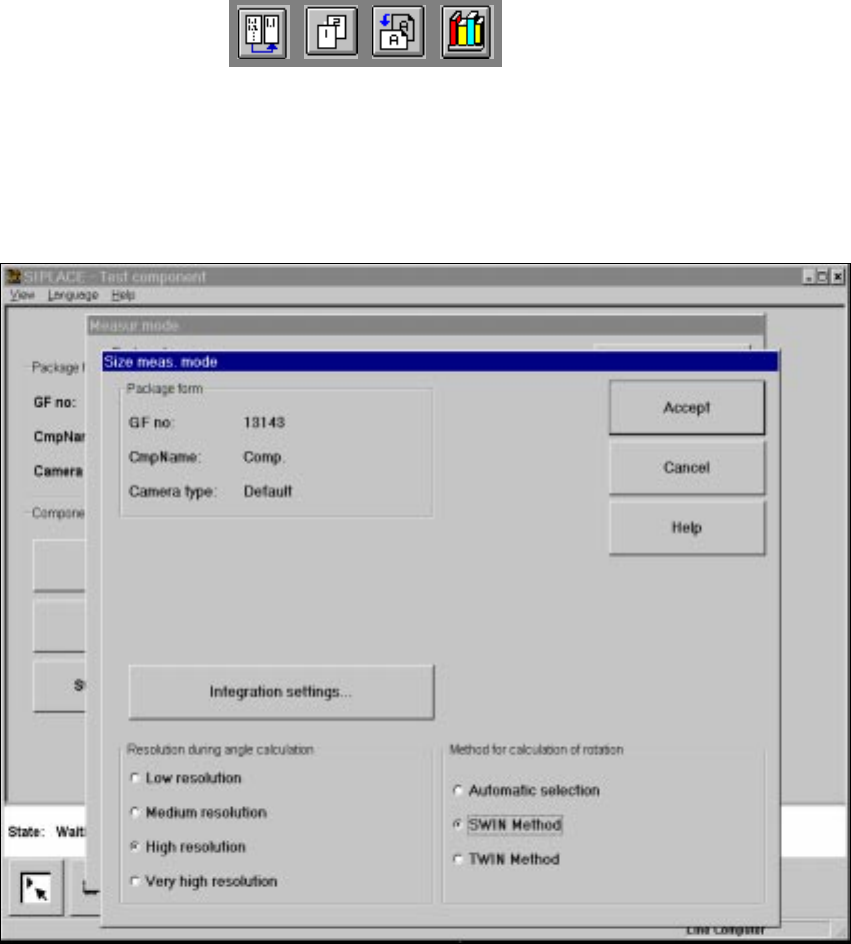
6.6.4.16 ‘Size’ measuring mode
Click on the ‘Setting’ field for the ‘Size’ measuring mode to overlay the Size measuring mode
menu on the screen. 6
6
Fig. 6.6 - 35 Measuring mode option, Size measuring mode menu
This menu is used to 6
– vary the resolution the angle calculation.
– specify the method for the rotation calculation and
– vary the integration settings.
Resolution for the angle calculation 6
In this measuring mode, if the component rotation has been calculated incorrectly on account of
ambiguity, you can increase the angular resolution in order to determine the angle of rotation. The
following increments may be used in relation to the resolution in order to determine the angle of
the components: 6
– Simple components: Low resolution:
– Complex components: High resolution