EasyOLP_V6.1中文说明书.pdf - 第358页
10-26 lvswG}] lvswG}] 10.5.2. Handling 选项卡 选择 Handling 选项卡时, 将弹出下列对话框。 <Adv . Settings> 设定其它参数。 Force Control Settings 可以设定是否在元件吸附或装贴过程中使用 Force Control 。 3MO Settings 可以设定是否进行 3MO(3 维检查 ) 。 Flux Setting 设定 F…

10-25
Part Browser
Align
设定元件识别用参数(40/50/20 only)。
Etc
设定其它Pickup参数。
Aligner
type
元件对齐方式
None
没有Align参数。Nozzle拾取了元件后,为了识别元件
并调整装贴角度而选择元件时,将省略对齐过程并直接
装贴。大型元件有时候会使用该选项。
Optical
Aligner
通过Optical Aligner识别元件。
利用心轴(spindle)驱使元件旋转,
Optical Aligner则在旁边识别元件。
激活Optical Aligner(40/50/20 Only)区。
Vision
通过Vision系统识别元件。
出现Vision选项卡。
Optical
Aligner
(40/50/20
Only)
设定使用Optical Aligner时的参数。
Scan Type
识别元件时的Scan方法(BODY,LEAD,CYLINDER,
SEMI
CYLINDER,FINE PITCH QFP,FINE PITCH PLCC).
Speed
元件识别速度(SLOW,MIDDLE,FAST)
Align
Height
元件识别高度。以上面为基准,到底面方向的元件识别
地点为之的距离。如果元件识别面为元件的上端(Top)
则输入正数(+)、否则输入负数 (-)值。
Scan Size
元件的X方向、Y方向的外观尺寸
Scan
Tolerance
(%)
扫描元件时容许的误差范围(X,Y)
Sync. Pick % X
同时Pick Up时的X方向容许误差。以相对于
Size X的百分率进行设定。
Y
同时Pick Up时的Y方向容许误差。以相对于
Size Y的百分率进行设定。
R
同时Pick Up时的R方向容许误差。以相对于R
的百分率进行设定。
Picku
p Retry
Pick Up失败使重试的次数,可以设定1-3的数值。
Placement
Angle
装贴角度
10-26
lvswG}]
lvswG}]
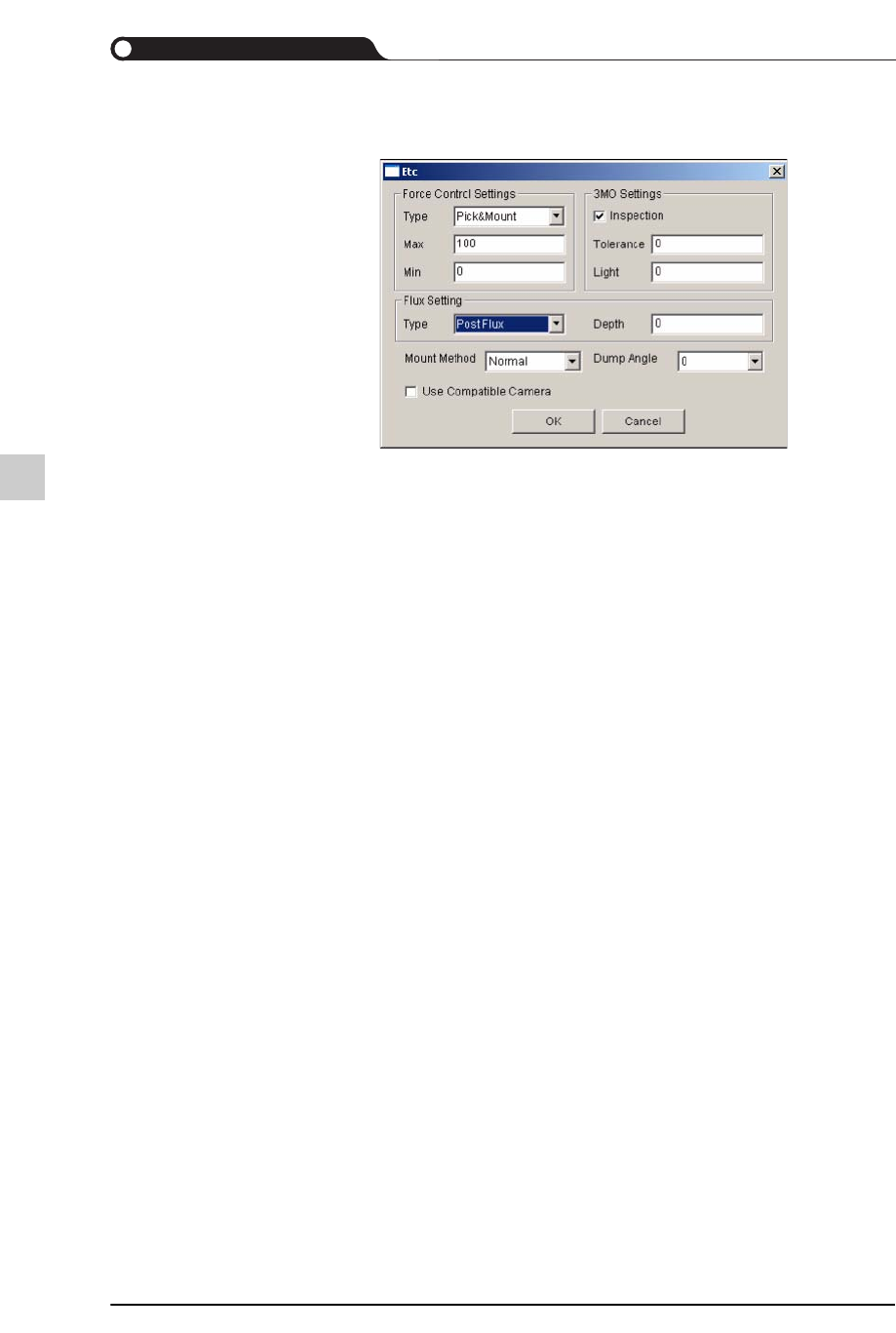
10.5.2. Handling 选项卡
选择Handling选项卡时,将弹出下列对话框。
<Adv.
Settings>
设定其它参数。
Force Control
Settings
可以设定是否在元件吸附或装贴过程中使用
Force Control。
3MO Settings
可以设定是否进行3MO(3维检查)。
Flux Setting
设定Flux的相关事项。
Mount
Method
设定Normal或Virtual Pick。
Dump Angle
在0,45,90,135,180,225,270,315中进行
设定。
Use
Compatible
Camera 复选
框
为了提高作业效率,可以在登记元件时设定是
否允许FOV相同的其它摄像机进行作业。
10-27
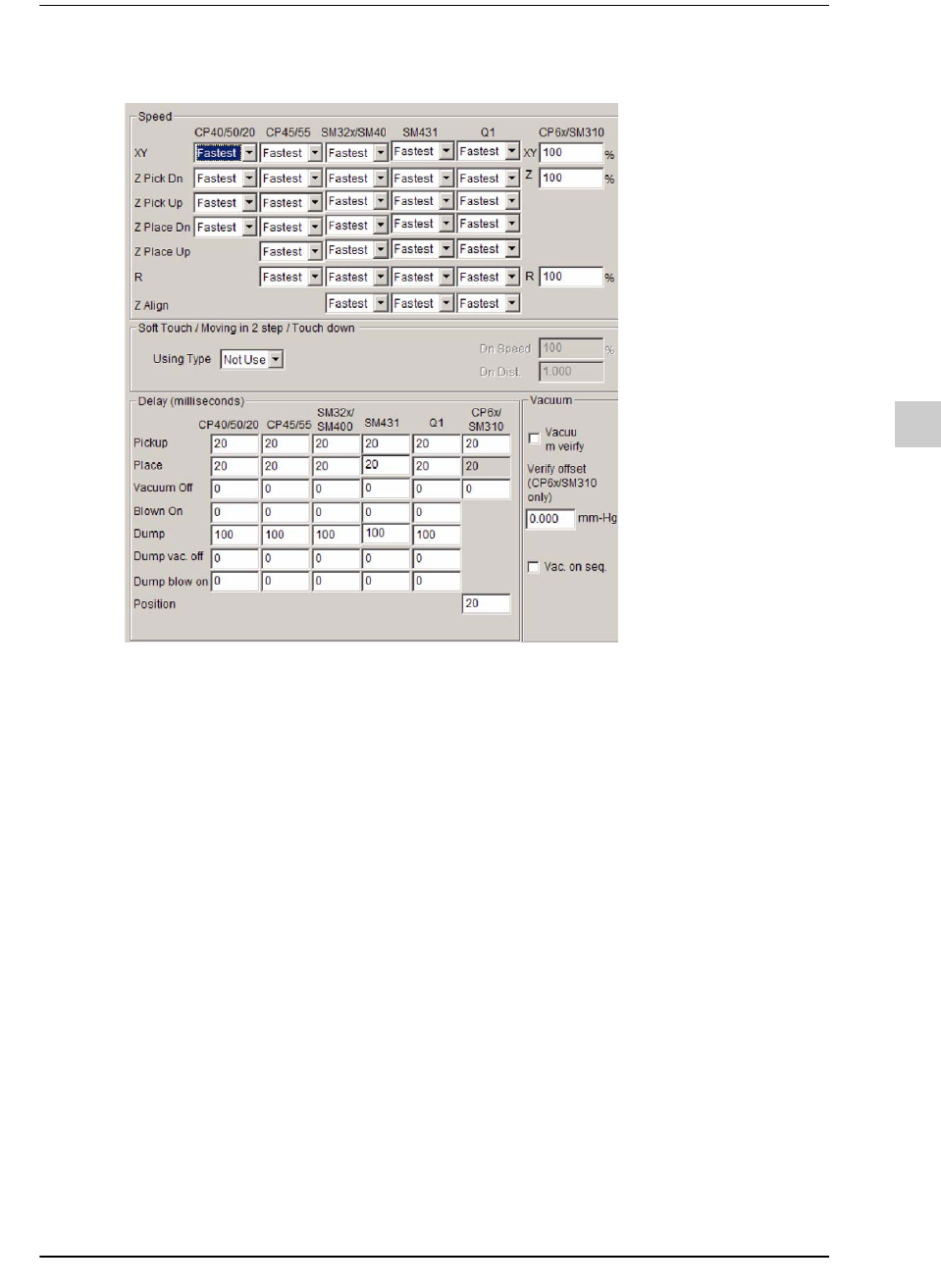
Part Browser
可以设定元件Pickup时的设备速度、设定元件装贴时的迟滞(Delay)。
Speed
可以设定各设备在拾取元件时的速度。
XY
XY驱动轴的移动速度
Z Pick Dn
为了吸附元件而使Head下降时,Z驱动轴的移动速度
Z Pick Up
吸附元件后Head上升时,Z驱动轴的移动速度
Z Place Dn
为了装贴元件而使Head下降时,Z驱动轴的移动速度
Z Place Up
装贴元件后Head上升时,Z驱动轴的移动速度
R
元件的旋转速度
Z Align
识别元件时Z驱动轴的移动速度
XY(%)
XY驱动轴的移动速度 (%单位)。数值介于30-100之间,100%时
最快。
Z(%)
Z驱动轴的移动速度 (%单位)。数值介于 30-100之间,100%时最
快。
R(%)
R轴的旋转速度 (%单位)。数值介于 30-100之间,100%时最快。