EasyOLP_V6.1中文说明书.pdf - 第363页
10-31 Part Browser Angle Check 可以设定是否针对 T het a 值使用系统所设定的基本识 别容许范围。 Presence Check 可以设定是否检查元件包含 Le ad 与否。 Pitch Check 可以设定是否针对 Le ad Pitch 使用系统所设定的基本 识别容许范围。 Tip Dev Check 可以设定是否以 Le ad 的平均对齐线为基准检查 Lead 位置。 Missing Ball …
10-30
lvswG}]
lvswG}]
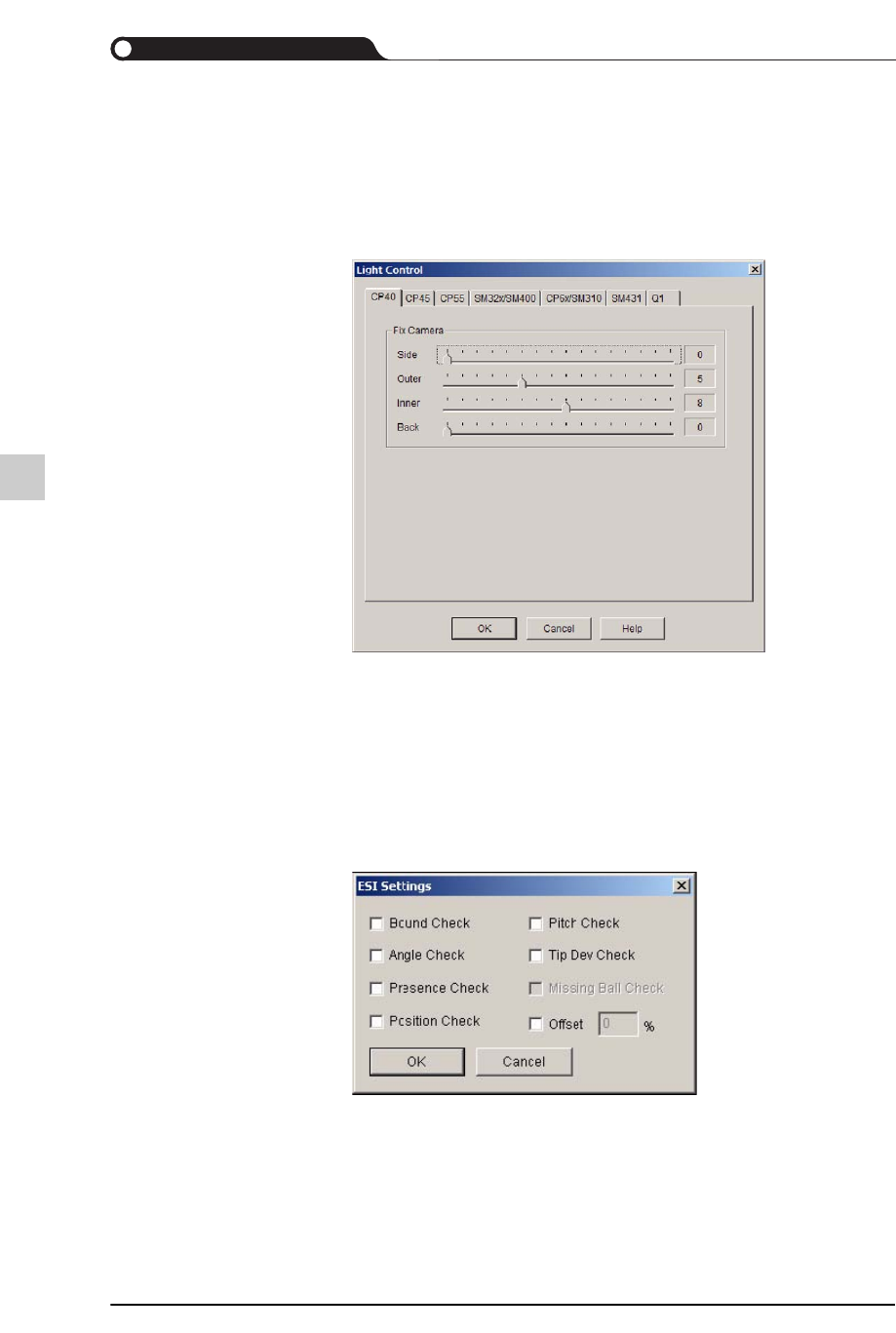
<Light
Control>
设定元件识别摄像机的照明。
元件DB含有各设备的照明值。因此使用者需要设定各照明值。读入元
件时,Teaching值将于以更新,其余的现有设定值则维持不变。
Export时,使用者在元件数据库编辑器(Part Editor)设定了适合各设备
的照明值后,将按照符合照明形式的照明值创建元件数据。
各细项的说明如下。
Side Side照明值(0 - 15)
Outer
Outer照明值 (0 - 15)
Inner
Inner照明值 (0 - 15)
Back
Back Linght照明值(0 - 15
<ESI
Settings>
设定CP60设备的元件特定参数。
各细项说明如下,需要使用该功能时只要圈选该复选框即可。
Bound
Check
在识别元件的本体与包含引脚的引脚外廓区X、Y
时,可以设定是否使用系统所设定的基本识别容许范
围
10-31
Part Browser
Angle Check
可以设定是否针对Theta值使用系统所设定的基本识
别容许范围。
Presence
Check
可以设定是否检查元件包含Lead与否。
Pitch Check
可以设定是否针对Lead Pitch使用系统所设定的基本
识别容许范围。
Tip Dev
Check
可以设定是否以Lead的平均对齐线为基准检查Lead
位置。
Missing Ball
Check
可以设定是否检查元件包含Ball与否。
Offset
与元件尺寸进行比较,离元件中心低于一定比率以内
的范围内吸附元件时进行装贴动作,如果脱离该距离
则废弃。
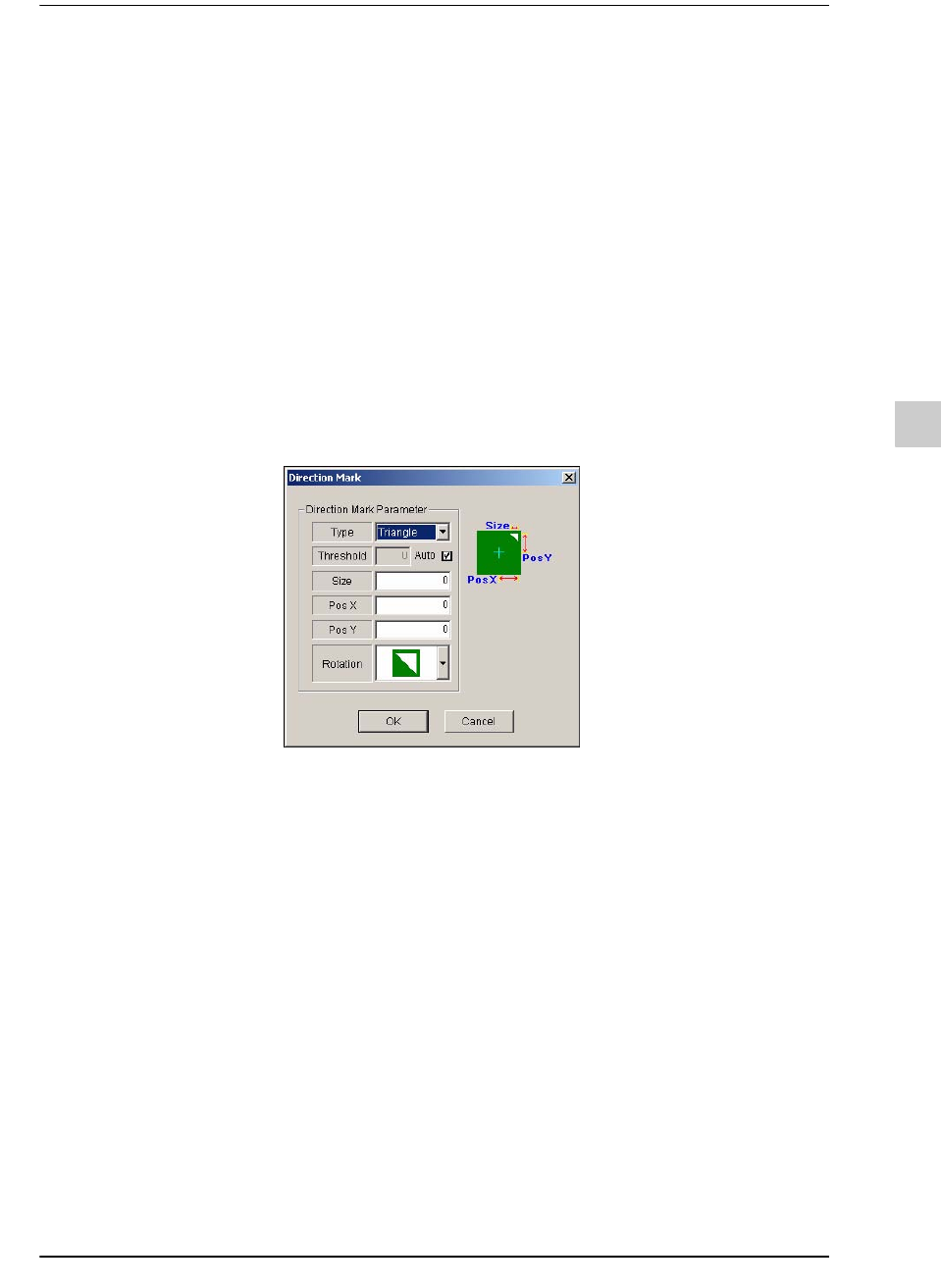
<Direction
Mark>
设定Direction Mark的参数。
Type
Direction Mark的种类
Threshold
在元件识别的前处理过程中,把Gray Level的图像转
换成Binary(二进位)时区分黑白的基准值。可以区别
背景与元件,该值的范围介于0 - 255(0:黑,255:白
)。设定值为0时,将自动设定数值(等同于圈选
Auto)。
Size
Direction Mark的X方向的长度
Pos X
元件的中心到Direction Mark的X方向距离
Pos Y
元件的中心到Direction Mark的Y方向距离
Rotation
设定元件的旋转程度。
10-32
lvswG}]
lvswG}]
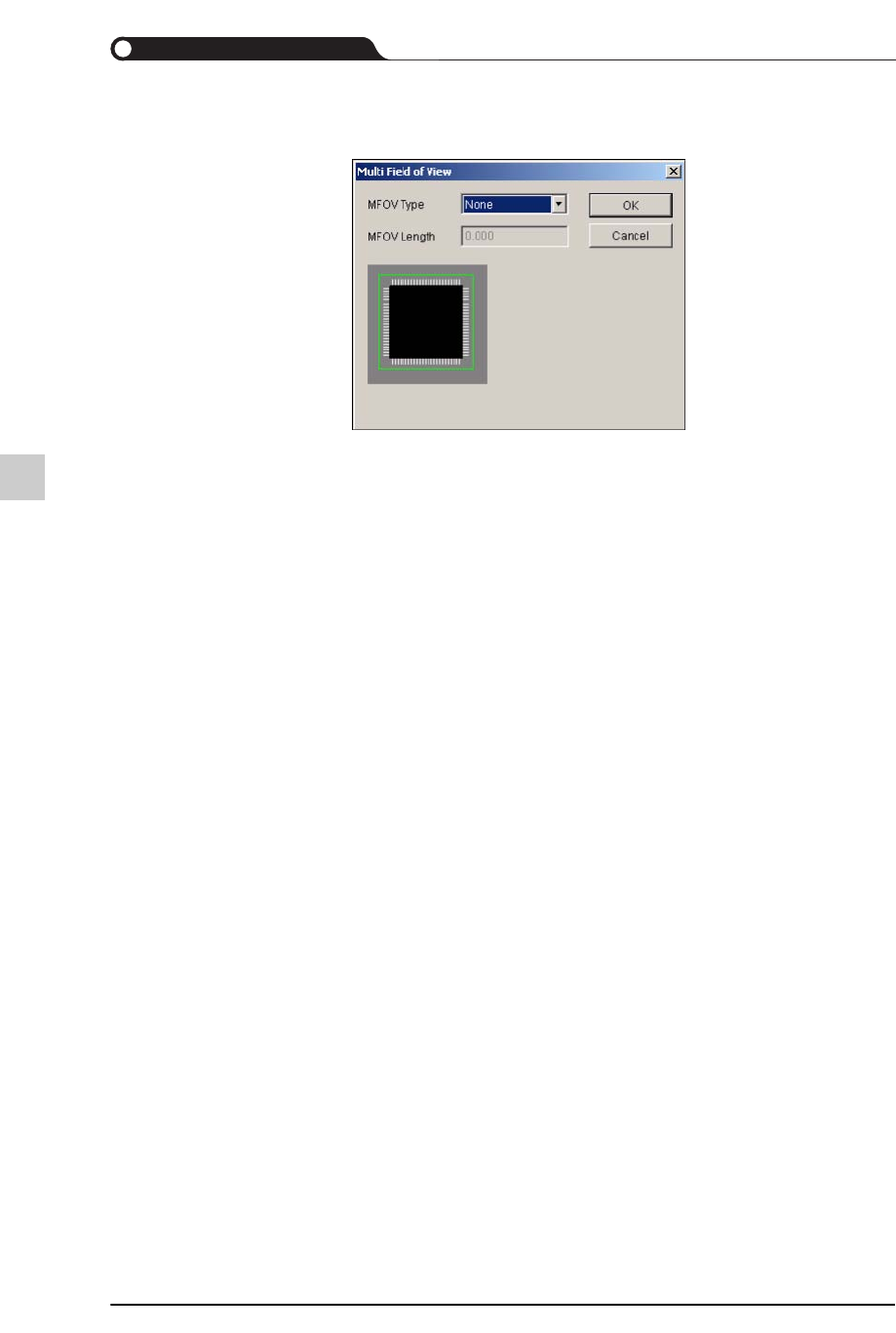
<MFOV
Settings>
设定分隔识别的形式。
MFOV Type Cross 2P
对于对角相对的2个角部进行分隔识别。
Cross 4P
对于4个角部进行分隔识别。
Linear 2H
以水平方向进行2分隔识别。
Linear 2V
以垂直方向进行2分隔识别。
Linear 3H
以水平方向进行3分隔识别。
Linear 3V
以垂直方向进行3分隔识别。
Linear 4H
以水平方向进行4分隔识别。
Linear 4V
以垂直方向进行4分隔识别。
MFOV
Length
分隔识别时,各View的元件移动距离。