EasyOLP_V6.1中文说明书.pdf - 第364页
10-32 lvswG}] lvswG}] <MFOV Settings> 设定分隔识别的形式。 MFOV T ype Cross 2P 对于对角相对的 2 个角部进行分隔识别。 Cross 4P 对于 4 个角部进行分隔识别。 Linear 2H 以水平方向进行 2 分隔识别。 Linear 2V 以垂直方向进行 2 分隔识别。 Linear 3H 以水平方向进行 3 分隔识别。 Lin…
10-31
Part Browser
Angle Check
可以设定是否针对Theta值使用系统所设定的基本识
别容许范围。
Presence
Check
可以设定是否检查元件包含Lead与否。
Pitch Check
可以设定是否针对Lead Pitch使用系统所设定的基本
识别容许范围。
Tip Dev
Check
可以设定是否以Lead的平均对齐线为基准检查Lead
位置。
Missing Ball
Check
可以设定是否检查元件包含Ball与否。
Offset
与元件尺寸进行比较,离元件中心低于一定比率以内
的范围内吸附元件时进行装贴动作,如果脱离该距离
则废弃。
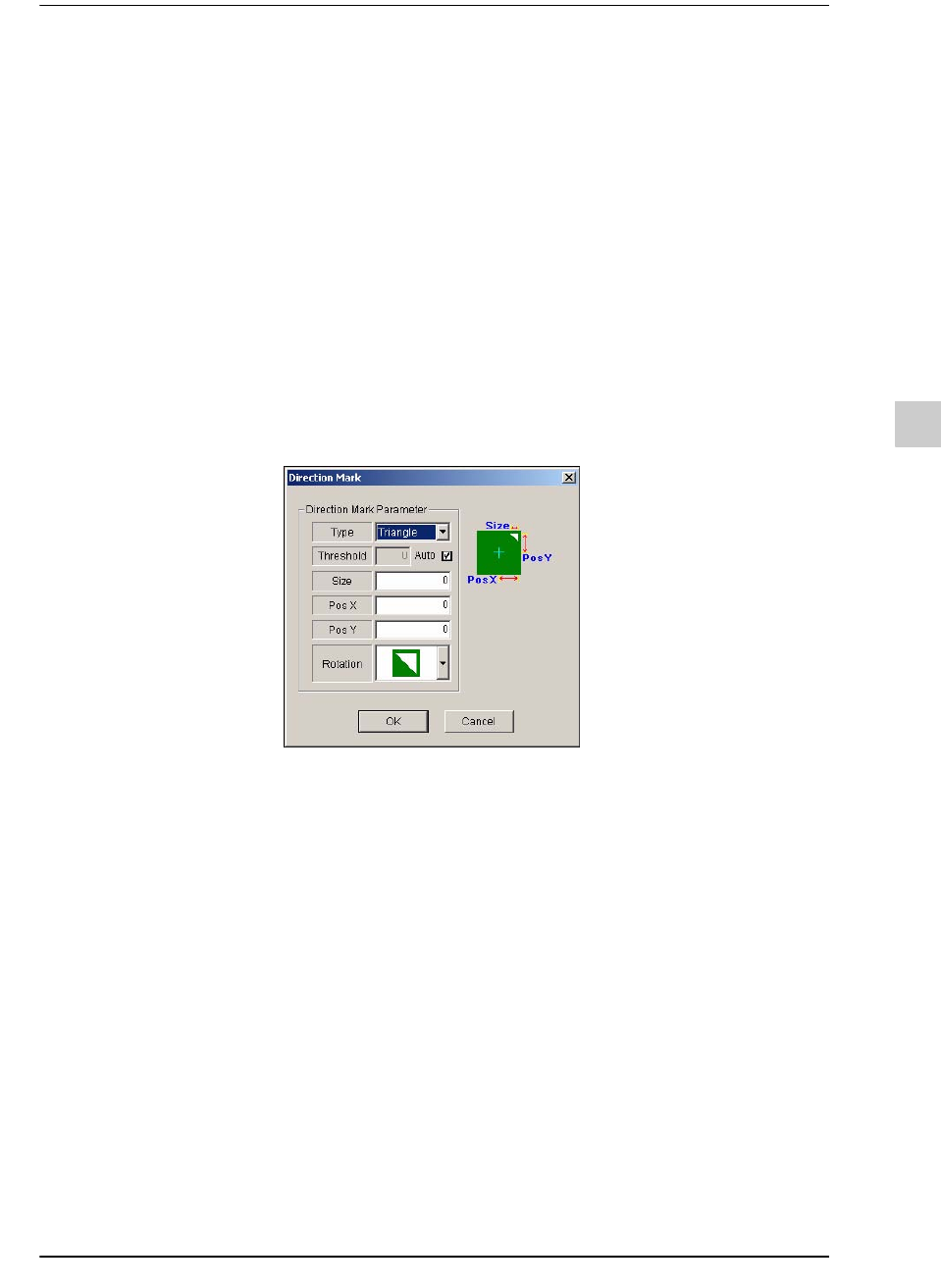
<Direction
Mark>
设定Direction Mark的参数。
Type
Direction Mark的种类
Threshold
在元件识别的前处理过程中,把Gray Level的图像转
换成Binary(二进位)时区分黑白的基准值。可以区别
背景与元件,该值的范围介于0 - 255(0:黑,255:白
)。设定值为0时,将自动设定数值(等同于圈选
Auto)。
Size
Direction Mark的X方向的长度
Pos X
元件的中心到Direction Mark的X方向距离
Pos Y
元件的中心到Direction Mark的Y方向距离
Rotation
设定元件的旋转程度。
10-32
lvswG}]
lvswG}]
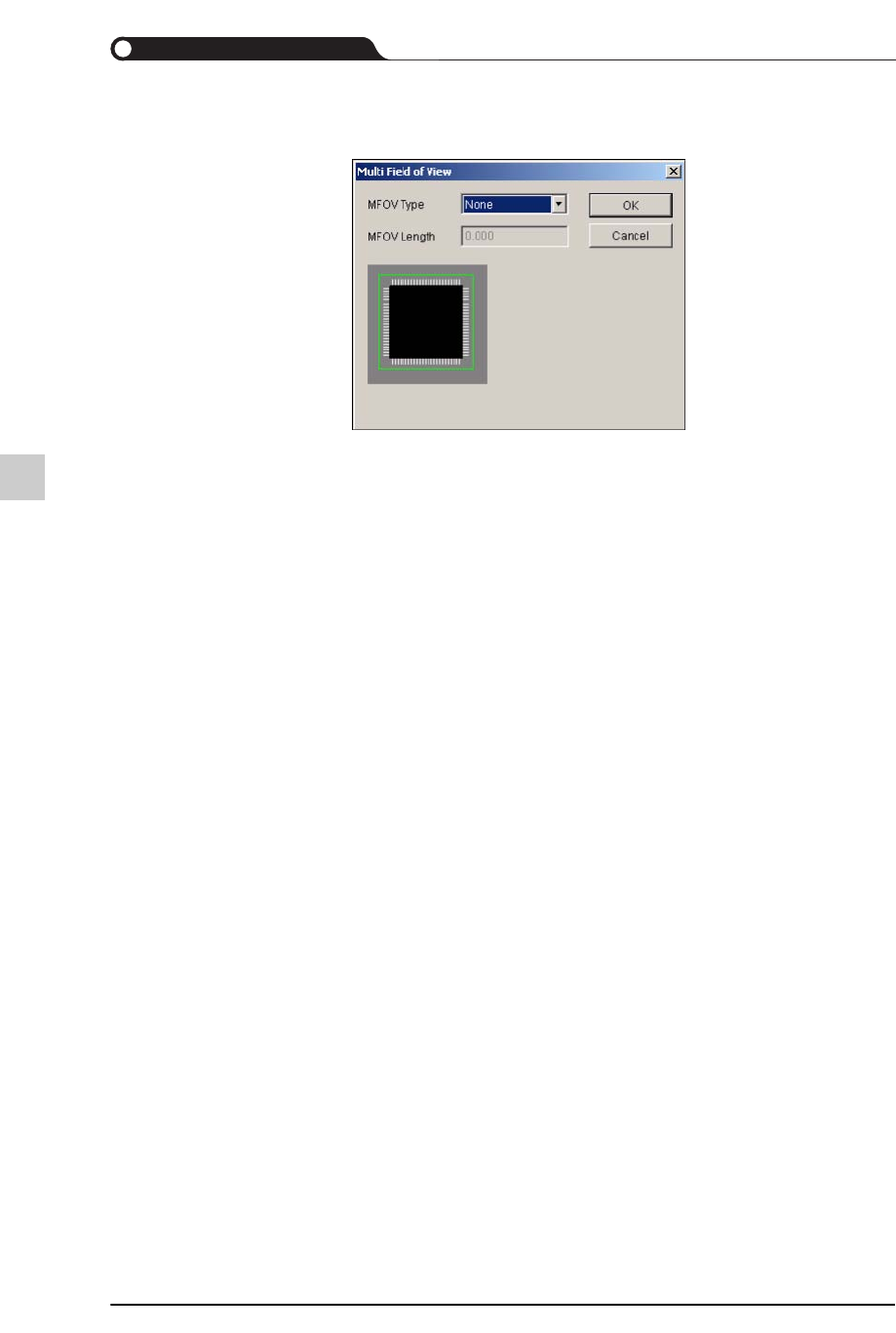
<MFOV
Settings>
设定分隔识别的形式。
MFOV Type Cross 2P
对于对角相对的2个角部进行分隔识别。
Cross 4P
对于4个角部进行分隔识别。
Linear 2H
以水平方向进行2分隔识别。
Linear 2V
以垂直方向进行2分隔识别。
Linear 3H
以水平方向进行3分隔识别。
Linear 3V
以垂直方向进行3分隔识别。
Linear 4H
以水平方向进行4分隔识别。
Linear 4V
以垂直方向进行4分隔识别。
MFOV
Length
分隔识别时,各View的元件移动距离。
10-33
Part Browser
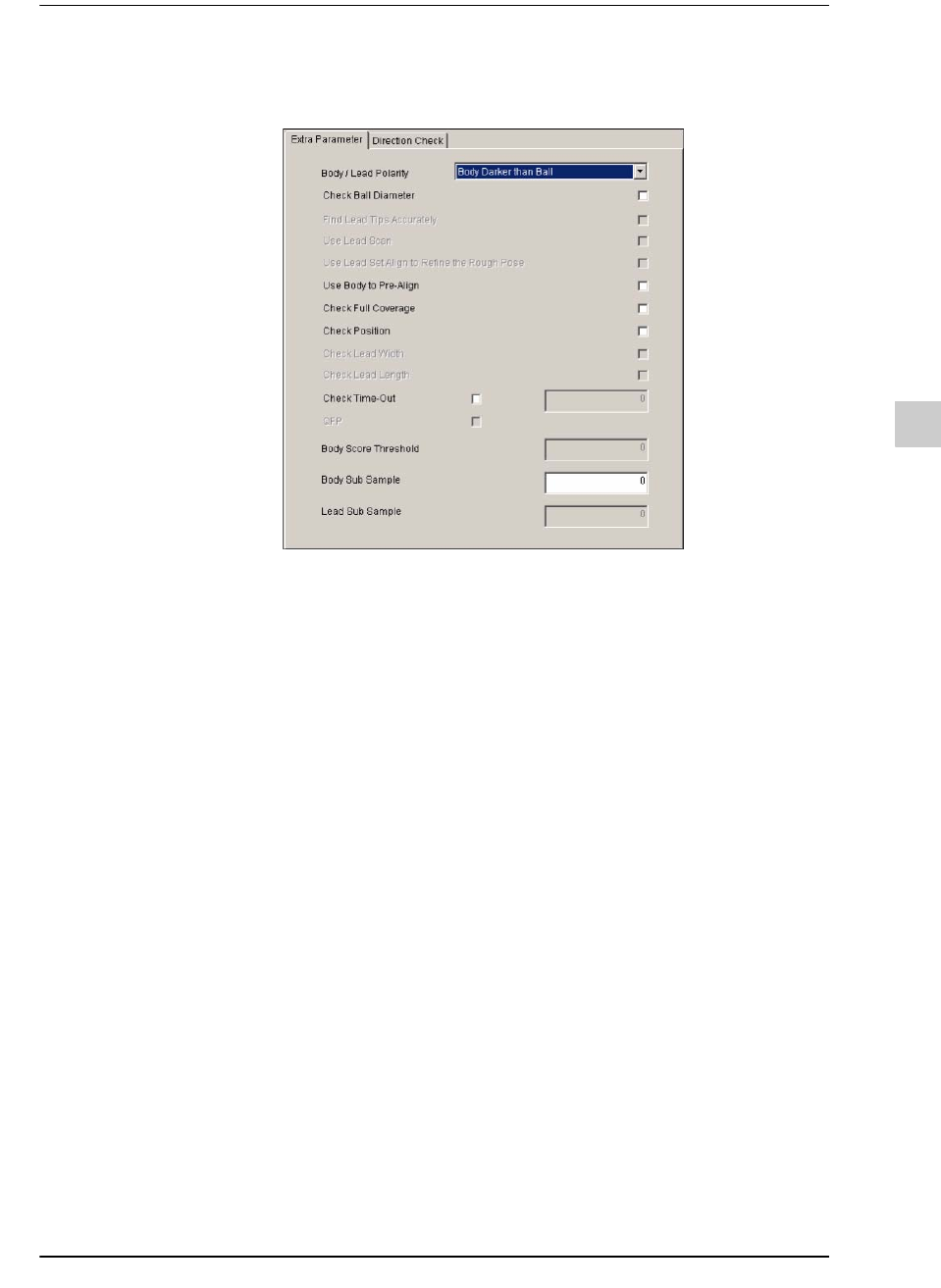
<EXPara
m>
设定其它参数,包括Extra Parameter选项卡与Direction Check选项
卡。
Extra Parameter选项卡的设定事项如下。
Body/Lead
Polarity
元件本体(Body)的亮度高于 Lead时设定为Body
Lighter than Lead,显得较暗时设定为Body Darker
than Lead。
Check Ball
Diameter
检查Ball的直径是否在容许值以内。
Find Lead
Tips
Accurately
准确地识别Lead尾端。
Use Lead
Scan
通过Lead Scan检索Lead。
Use Lead
Set Align to
refine the
Rough Pose
识别元件时利用元件的Lead信息计算元件的大略位
置。
Use Body to
Pre-Align
识别元件时利用Body信息计算元件位置。
Check Full
Coverage
可以设定为检查整体Ball后要求所有的Ball都在容许
误差范围以内,或者设定为即使一部分Ball脱离了容
许误差范围也利用其余Ball计算元件中心。
Check
Position
检查各Ball的位置是否在容许值以内。
Check Lead
Width
检查Lead宽度是否在容许值以内。