EasyOLP_V6.1中文说明书.pdf - 第372页
10-40 lvswG}] lvswG}] 10.5.3.5. QFP 设定 QFP 、 PLCC 、 SOP 、 SOJ 、 SO P2 及 SOJ2 元件的 Align 数据。 各细项的说明如下。 X Lead Num X 轴方向的一边的 Lead 数量 Y Lead Num Y 轴方向的一边的 Lead 数量 To t a l X X 轴方向 Lead 的总数量 To t a l Y Y 轴方向 Lead 的总数量 B…
10-39
Part Browser
Camera 及 OptCamera及 Option请参阅[10.5.3.1. 共同区域,第 10-29页]
Threshold
在元件识别的前处理过程中,把 Gray Level的图像转换成Binary(二
进位)时区分黑白的基准值。可以区别背景与元件,该值的范围介于
0 - 255(0:黑,255:白 )。设定值为0时,将自动设定数值(等同于圈
选Auto Threshold)。
Total X
元件的X方向尺寸
Total Y
元件的Y方向尺寸
Left Lead Num
左侧Lead的数量
Left Foot W
左侧Lead Foot的Y方向长度
Left Foot L
左侧Lead Foot的X方向长度
Left Lead P
左侧第一个Lead与最后一个Lead的中心线之间的距离
Right Lead Num
右侧Lead的数量
Right Foot W
右侧Lead Foot的Y方向长度
Right Foot L
右侧Lead Foot的X方向长度
Right Lead P
右侧第一个Lead与最后一个Lead的中心线之间的距离
Align Z
识别高度。以元件的底面为基准,如果要识别上侧则设定为负数 (-
)、如果要识别下侧则设定为正数 (+)。
White Body
元件本体(Body)的颜色为白色时予以设定
Heat
元件本体(Body)上安装了冷却板时进行设定。
10-40
lvswG}]
lvswG}]
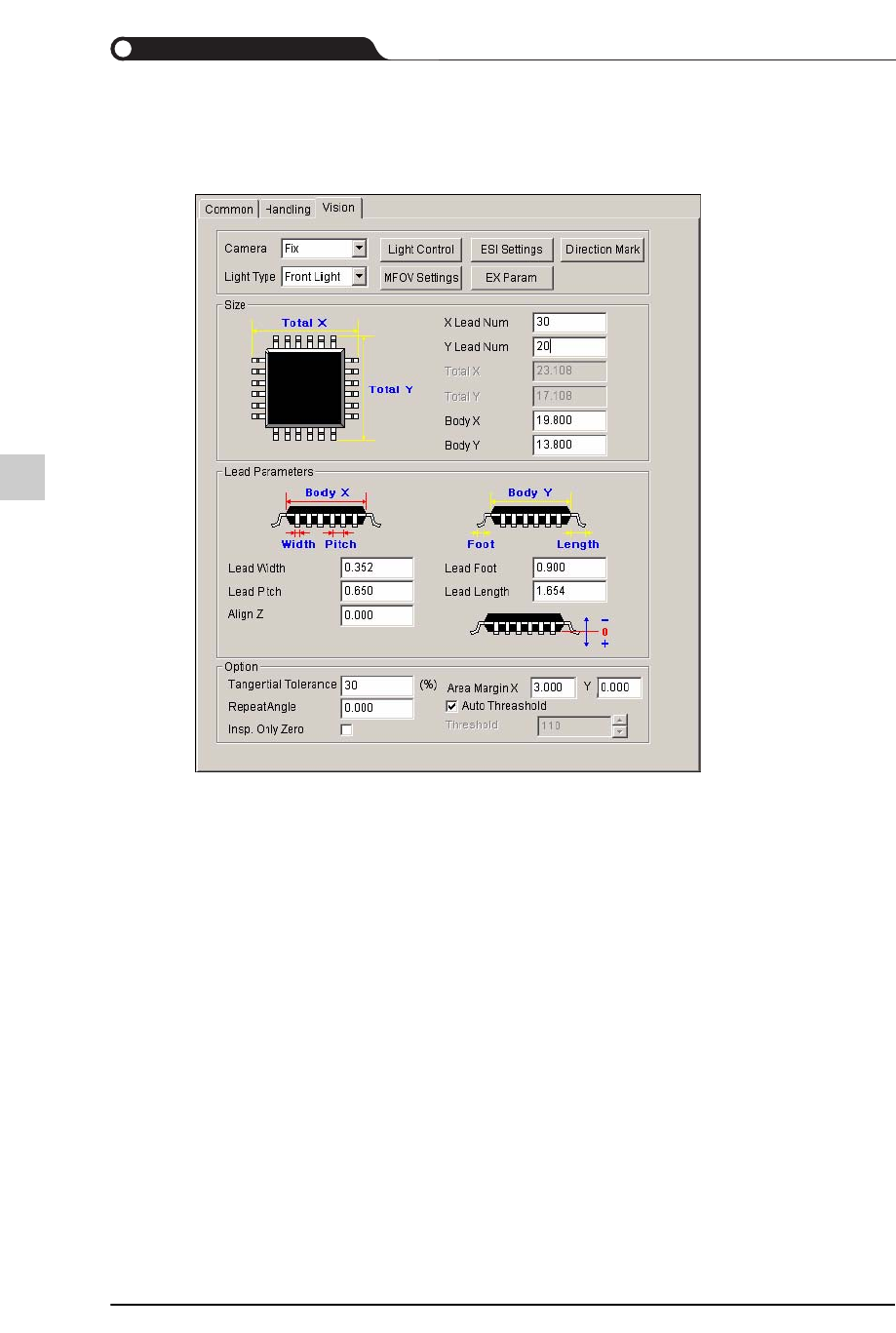
10.5.3.5. QFP
设定QFP、PLCC、SOP、SOJ、SOP2及 SOJ2元件的Align数据。
各细项的说明如下。
X Lead Num
X轴方向的一边的 Lead数量
Y Lead Num
Y轴方向的一边的 Lead数量
Total X
X轴方向 Lead的总数量
Total Y
Y轴方向 Lead的总数量
Body X
元件本体(Body)的 X方向尺寸
Body Y
元件本体(Body)的 Y方向尺寸
Lead Width
Lead的宽度
Lead Pitch
相邻Lead的中心线之间的距离
AlignZ
识别高度。以元件的底面为基准,如果要识别上侧则设定为负数 (-
)、如果要识别下侧则设定为正数 (+)。
Lead Foot
与底面接触的Lead的长度
Lead Length
在Optical Aligner或者Vision System识别的 Lead的长度
10-41
Part Browser
Camera及Option的其余内容请参阅[10.5.3.1. 共同区域,第 10-29页]
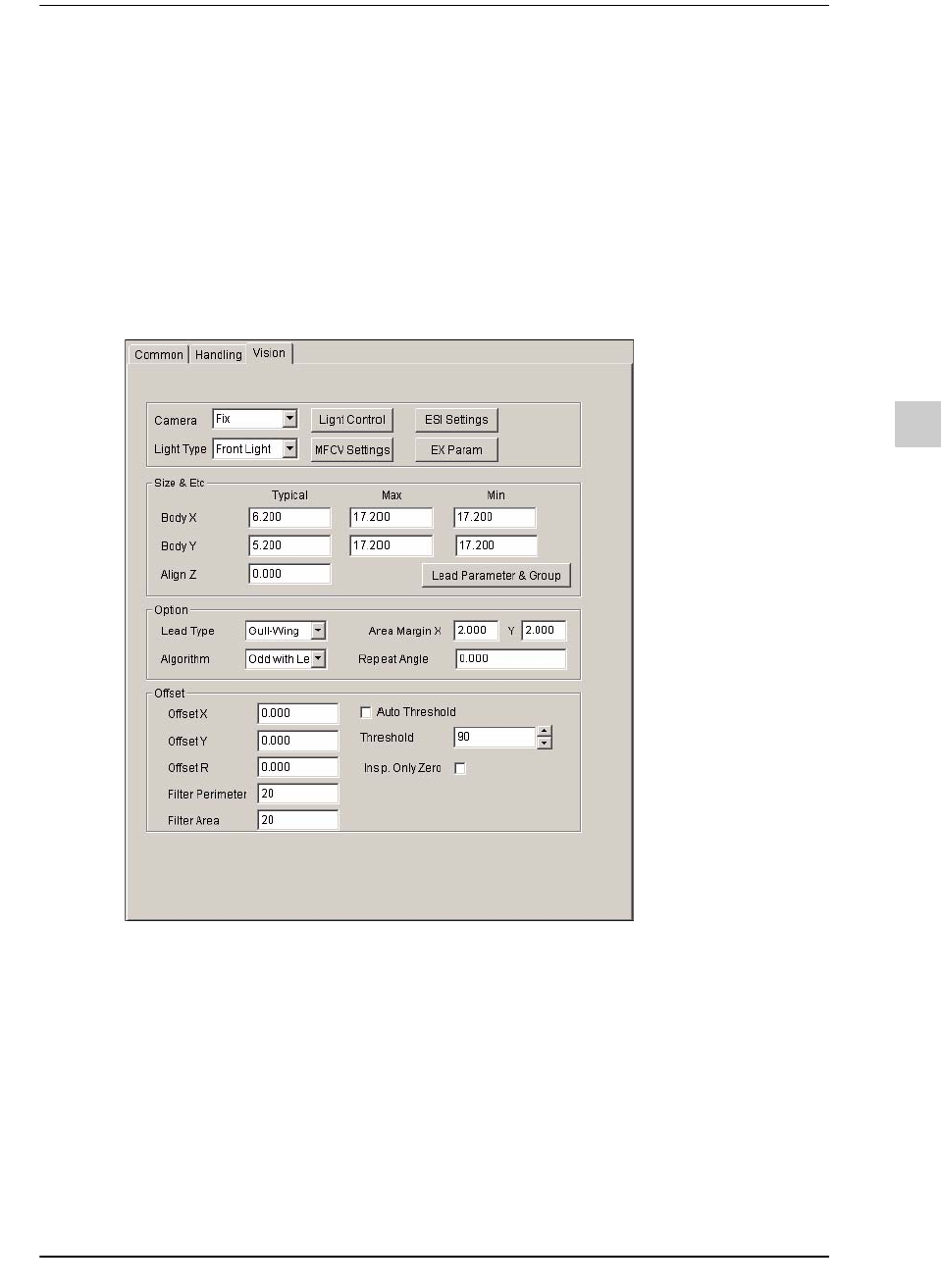
10.5.3.6. User IC
设定User IC、Connector-1、Connector-2及Hemt元件的 Align数据。
各细项的说明如下。
Repeat Angle
装贴高精密元件时所使用的功能,针对角度补正之前与之后的结果
值进行比较后决定是否装贴。
Repeat Angle值设定为0.1时,在进行了初始视觉识别后根据视觉
识别结果而补正角度并且重新识别,如果识别后的差异大于0.1则
重新补正后再重新识别,小于 0.1则装贴。
Body X
元件本体(Body)的X方向尺寸
Body Y
元件本体(Body)的Y方向尺寸
Align Z
识别高度。以元件的底面为基准,如果要识别上侧则设定为负数 (-)、如果要
识别下侧则设定为正数(+)。