EasyOLP_V6.1中文说明书.pdf - 第376页
10-44 lvswG}] lvswG}] Camera 及 Option 区的其余内容请参阅 [10.5. 3.1. 共同区域 , 第 10-29 页 ] Black Body 由于元件本体 (Body) 呈黑色而只由 Lead 发亮时。 Odd without Lead 仅识别异型元件的外廓事。 Odd with Lead 识别异型元件的外廓并且还识别引脚时, Algorithm 选择 Odd without Lead …
10-43
Part Browser
No
Lead Group编号。
Group L. No
该Lead Group所具有的Lead数量。
Group P. No
Lead Group所参照的Lead Parameter编号。
Group Angle
Lead Group位于元件的方向。以右侧边为基准(0),以 逆
时针方向设定正数(+)值。
Center Tan
从元件的基准点(一般为元件中心)到Lead Group的中
心为止的切线方向距离。
Center Rad 从元件的基准点(一般为元件中心 )到Lead Group的中
心为止的法线方向距离。
各键的说明如下。
<Add Param>
在Lead Parameter区添加参数。
<Apply
Param>
适用参数。输入的参数值不正确时,将弹出下列画面。
<Delete
Param>
删除参数。删除时,需要单击 No列的相应参数编号加以
选择后再删除。在没有选择的情形下删除时,将弹出下
列画面。
<Add Group>
在Lead Group区添加群。
<Apply
Group>
适用群。
<Delete
Group>
删除群。
Lead Type Lead的种类
Gull- Wing
J-Lead
Algorithm
元件的识别算法。
All Body
由于元件本体(Body)的杨色较亮而使Lead与本体
(Body)全部发亮时。
10-44
lvswG}]
lvswG}]
Camera及Option区的其余内容请参阅[10.5.3.1. 共同区域,第 10-29页 ]
Black Body
由于元件本体(Body)呈黑色而只由Lead发亮时。
Odd without
Lead
仅识别异型元件的外廓事。
Odd with
Lead
识别异型元件的外廓并且还识别引脚时,Algorithm选择
Odd without Lead或Odd with Lead,即可激活下列
Offset区的Offset X、Offset Y、Offset R、Filter
Perimeter及 Filter Area。
Offset X
元件的重心与实际中心之间的X方向偏移值。
Offset Y
元件的重心与实际中心之间的Y方向偏移值。
Offset R
元件的主轴角度与实际角度之间的偏移值。
Filter
Perimeter
为了在元件的Vision图像消除噪音成分而设定的值。图像上的物体外缘小
于设定值时,视为噪音并进行处理。
Filter Area
为了在元件的Vision图像消除噪音成分而设定的值。图像上的物体面积小
于设定值时,视为噪音并进行处理。
Auto
Threshold
在元件数据库编辑器(Part Editor)自动设定Threshold值。Threshold将处
于非激活状态。
Threshold 在元件识别的前处理过程中,把Gray Level的图像转换成Binary(二进位)
时区分黑白的基准值。可以区别背景与元件,该值的范围介于 0 - 255(0:
黑,255:白 )。设定值为0时,将自动设定数值(等同于圈选Auto
Threshold)。
10-45
Part Browser
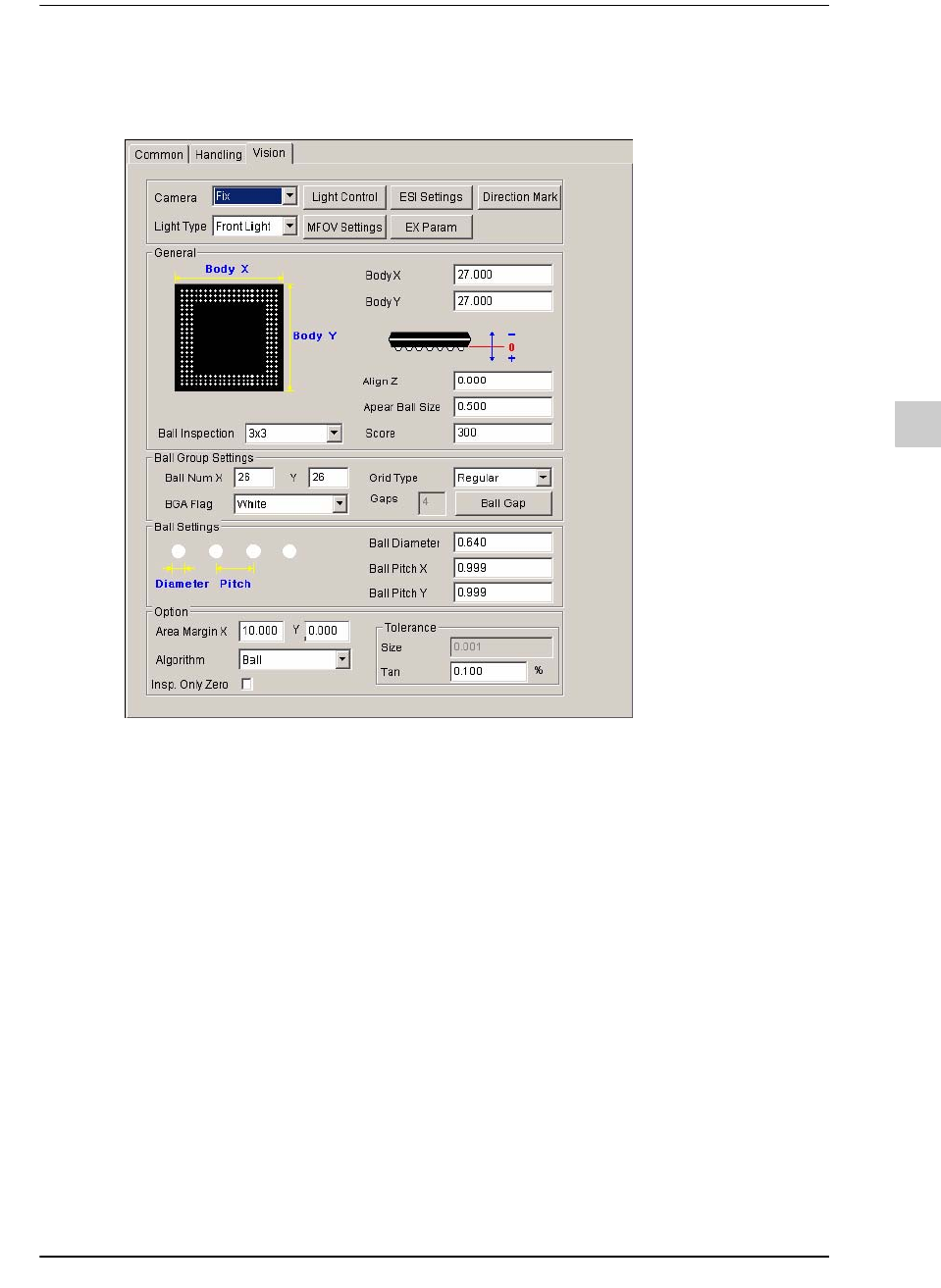
10.5.3.7. BGA
设定BGA元件的Align数据。
各细项的说明如下。
Ball
Inspection
为了检查Ball的异常与否而设定基准线。
Full
检查所有的Ball。虽然可以获得准确结果,但需时较多。
3x3
从元件边缘起的3线
4x4
从元件边缘起的4线
5x5
从元件边缘起的5线
6x6
从元件边缘起的6线
7x7
从元件边缘起的7线
Body X
X元件的 X方向尺寸
Body Y
Y元件的 Y方向尺寸
Align Z
识别高度。以元件本体 (Body)的底面为基准,如果要识别上侧则设定为
负数(-)、如果要识别下侧则设定为正数 (+)。