EasyOLP_V6.1中文说明书.pdf - 第382页
10-50 lvswG}] lvswG}] PosY 以 Bo dy Center 为基准, 到 Grid Group 的 Center 为之的 Y 方向坐标。 Current Group 区的细项如下。 Group 当前选定 Grid Group 的序列号。 No 列的编号从 0 开始, 因此是 No 列的编号上多加 1 的值。 GAP 在当前选定 Grid Group 中空 Ball 的数量。 Ball Gap 显示当前…
10-49
Part Browser
各细项的说明如下。
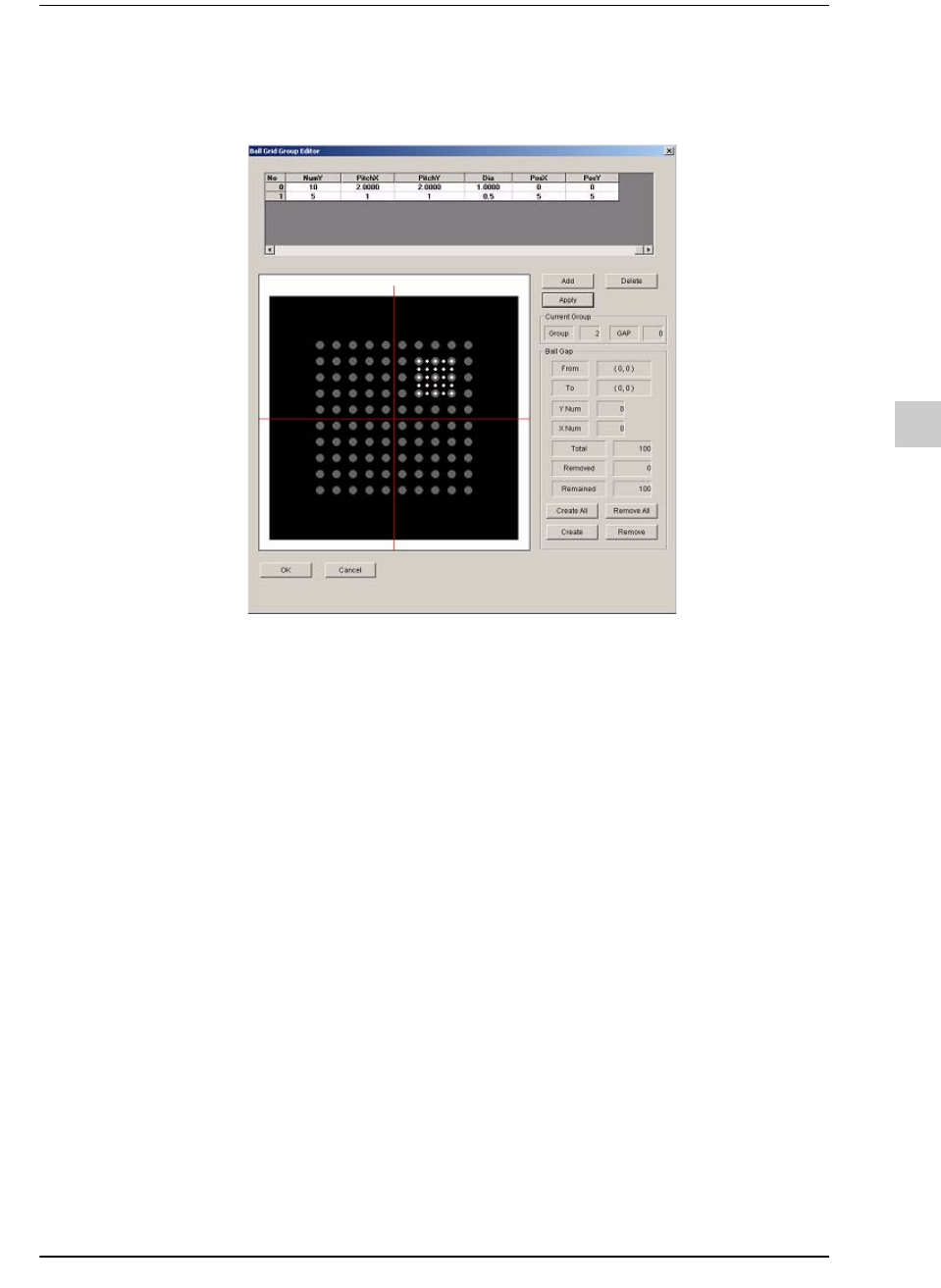
<Edit Grid
Group>
编辑Multi BGA元件 Grid Group。
Graphics Area区的说明如下。
Multi BGA元件的 Ball配置状态. 当前作业中的Group显示为亮色,其它群
显示为灰色。
在当前作业中的Group利用鼠标按住单击一定区域后拖拉时,可以选择
Ball。
Ball Grid Group区的各列的说明如下。
显示当前登记的Grid Group。
No
Grid Group编号。适用范围是0-9。
NumX
Grid Group的X方向的 Ball排列数量。
NumY
Grid Group的Y方向的 Ball排列数量。
PitchX
在Grid Group中沿着X方向的相邻 Ball中心之间的距
离。
PitchY
在Grid Group中沿着Y方向的相邻 Ball中心之间的距
离。
Dia
在Grid Group的Ball直径。
PosX
以Body Center为基准,到Grid Group的 Center为之的
X方向坐标
10-50
lvswG}]
lvswG}]
PosY
以Body Center为基准,到Grid Group的 Center为之的
Y方向坐标。
Current Group区的细项如下。
Group
当前选定Grid Group的序列号。No列的编号从 0开始,
因此是No列的编号上多加1的值。
GAP
在当前选定Grid Group中空Ball的数量。
Ball Gap显示当前选定区中已删除的 Ball的信息,细项如下。
From
选定区的第一个Ball的坐标。
To
选定区的最后一个Ball的坐标。
Y Num
选定区中Y方向的Ball数量。
X Num
选定区中X方向的Ball数量。
Total
当前选定Grid Group中Ball的总数量。
Removed
当前选定Grid Group中已删除的Ball的数量。
Remained
当前选定Grid Group中剩下的Ball的数量。
各键的说明如下。
<Add>
添加Grid Group。
<Delete>
删除Grid Group。
<Apply>
反映编辑内容。
<Create All>
把当前选定Grid Group中已删除的Ball全部加以复原。
<Create>
把选定区中已删除的Ball加以复原。
<Remove
All>
在当前选定Grid Group中删除所有的Ball。
<
Remo
ve>
在选定区中删除所有的Ball。
Body X
元件本体(Body)的X方向尺寸
Body Y
元件本体(Body)的Y方向尺寸
Appear
Size
实际Ball尺寸与Vision图像上的Ball尺寸的比率。如果该值为0.1,则表示
图像为实际Ball尺寸的90-110%,如果该值为 0.5,则表示图像为实际Ball
尺寸的50-150%。
Score
该值表示Ball的识别结果与设定值的一致程度。设定为1000时需要完全一
致,通常设定为600。该值太小会降低识别精密度,太大则会增加识别结果
的不良次数。
Algorithm
BGA元件的识别算法
Ball
只使用Ball识别元件。适用于可以明确区分Ball的BGA。
10-51
Part Browser
Camera及Option的其余内容清参阅[10.5.3.1. 共同区域,第 10-29页]
Ball &
Body
同时考虑本体(Body)与Ball后进行元件识别作业。主要适用于难以区分
Ball与本体的BGA。
Align Z
识别高度。以元件本体(Body)的底面为基准,如果要识别上侧则设定为负
数(-)、如果要识别下侧则设定为正数(+)。
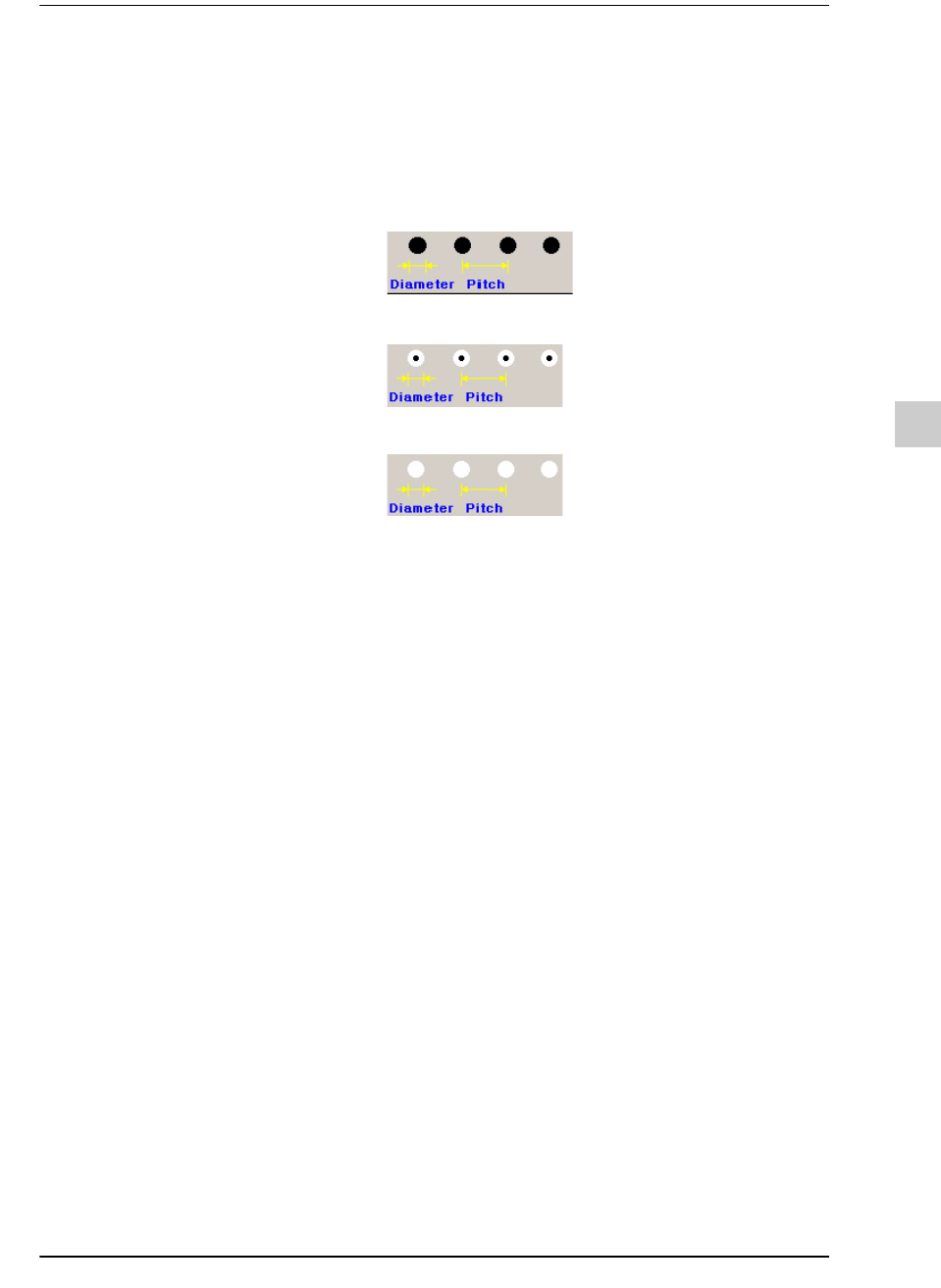
BGA Flag
Ball的颜色
Black
Ball的颜色为黑色。
W & B
中央部位是黑色,外廓是白色。
White
Ball的颜色为白色。
Repeat
Angle
装贴高精密元件时所使用的功能,针对角度补正之前与之后的结果值进行
比较后决定是否装贴。
Repeat Angle值设定为0.1时,在进行了初始视觉识别后根据视觉识别结
果而补正角度并且重新识别,如果识别后的差异大于0.1则重新补正后再重
新识别,小于0.1则装贴。