EasyOLP_V6.1中文说明书.pdf - 第387页
10-55 Part Browser 10.5.3.10.POLYGON 设定 Polygon 元件的 Align 数据。 各细项的说明如下。 Area Margin 元件识别区, 表示 Image 脱离实际元件尺寸的程度。 吸附元件时如果能以准确的基准点进行吸附, 就能把摄像机识别元件的 识别区设定成元件尺寸, 但实际上吸附点总是会多多少少脱离基准点。 鉴于上述事实, 为元件尺寸设定了识别元件时所容许的区域。 Repeat An gl…
10-54
lvswG}]
lvswG}]
Camera及Option的其余内容请参阅[10.5.3.1. 共同区域,第 10-29页]
Flip Chip Ball Position区的说明如下。
以表格形态的坐标显示Ball的位置。
No
所创建的Ball的序列号。编号从0开始。
PositionX
Flip Chip Body里的Ball的X方向位置(Unit:mm)
PositionY
Flip Chip Body里的Ball的Y方向位置(Unit:mm)
Position Display区的说明如下。
鼠标位于Graphics Area区时,在画面的右下角上显示鼠标 Cusor的当前位
置(Unit: mm)。
各键的说明如下。
<Add>
创建新Ball。
<Delete>
清除Graphics Area或Grid Area中选择的Ball。
<Apply>
储存所设定的内容。
<OK>
储存所设定的内容并结束对话框。
<Cancel>
不储存所设定的内容并结束对话框。
Use
Polygon
利用多边形数据编辑元件本体(Body)时使用。
10-55
Part Browser
10.5.3.10.POLYGON
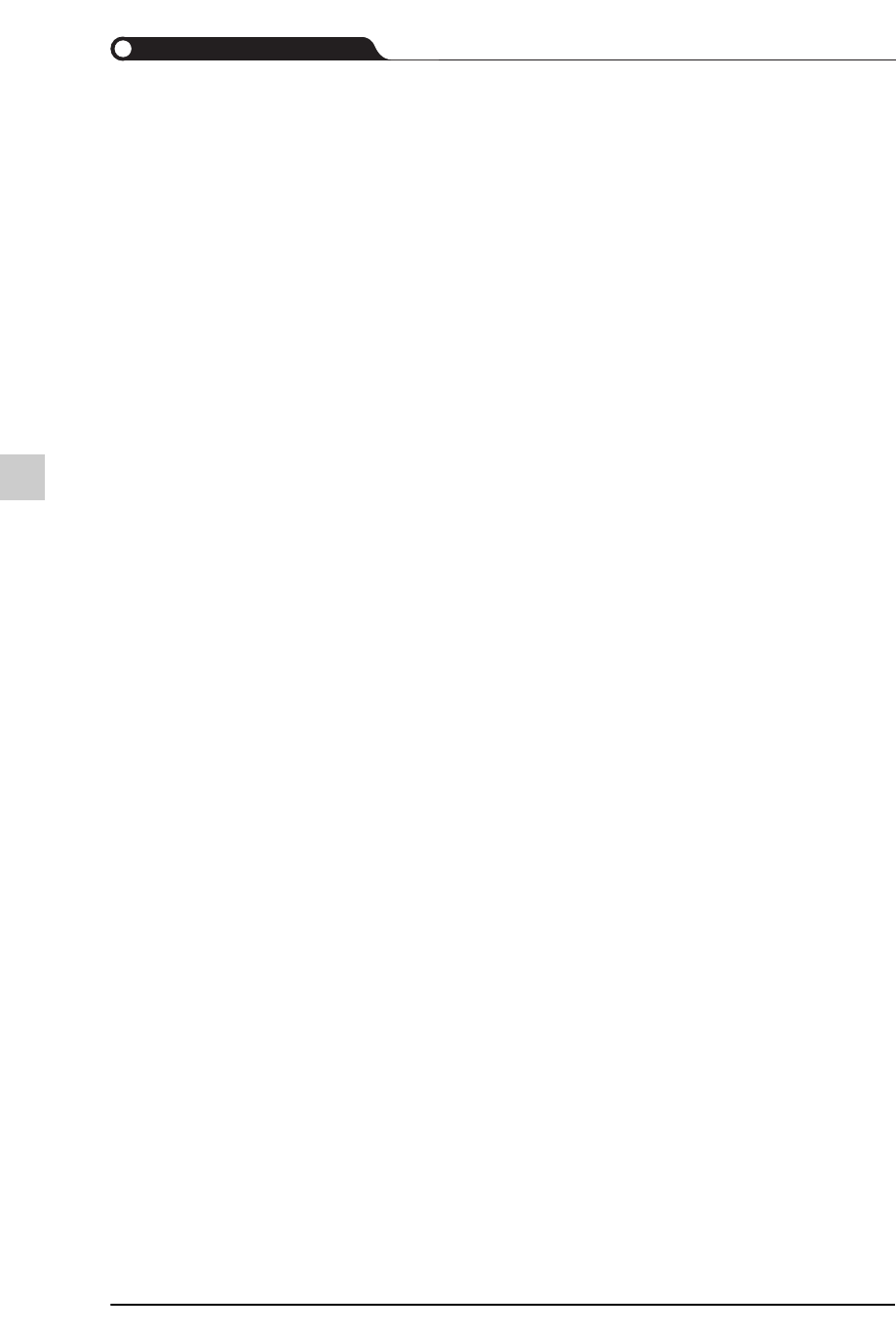
设定Polygon元件的Align数据。
各细项的说明如下。
Area Margin
元件识别区,表示 Image脱离实际元件尺寸的程度。
吸附元件时如果能以准确的基准点进行吸附,就能把摄像机识别元件的
识别区设定成元件尺寸,但实际上吸附点总是会多多少少脱离基准点。
鉴于上述事实,为元件尺寸设定了识别元件时所容许的区域。
Repeat Angle
装贴高精密元件时所使用的功能,针对角度补正之前与之后的结果值进
行比较后决定是否装贴。
Repeat Angle值设定为0.1时,在进行了初始视觉识别后根据视觉识别
结果而补正角度并且重新识别,如果识别后的差异大于 0.1则重新补正
后再重新识别,小于 0.1则装贴。
Insp. Only
Zero
识别元件时,始终以 0度为基准进行元件识别作业。
Score
该值表示Ball的识别结果与设定值的一致程度。设定为1000时需要完
全一致,通常设定为 600。该值太小会降低识别精密度,太大则会增加
识别结果的不良次数。
Polarity
设定元件的Polarity
10-56
lvswG}]
lvswG}]
Camera及Light请参阅 [10.5.3.1. 共同区域,第 10-29页 ]
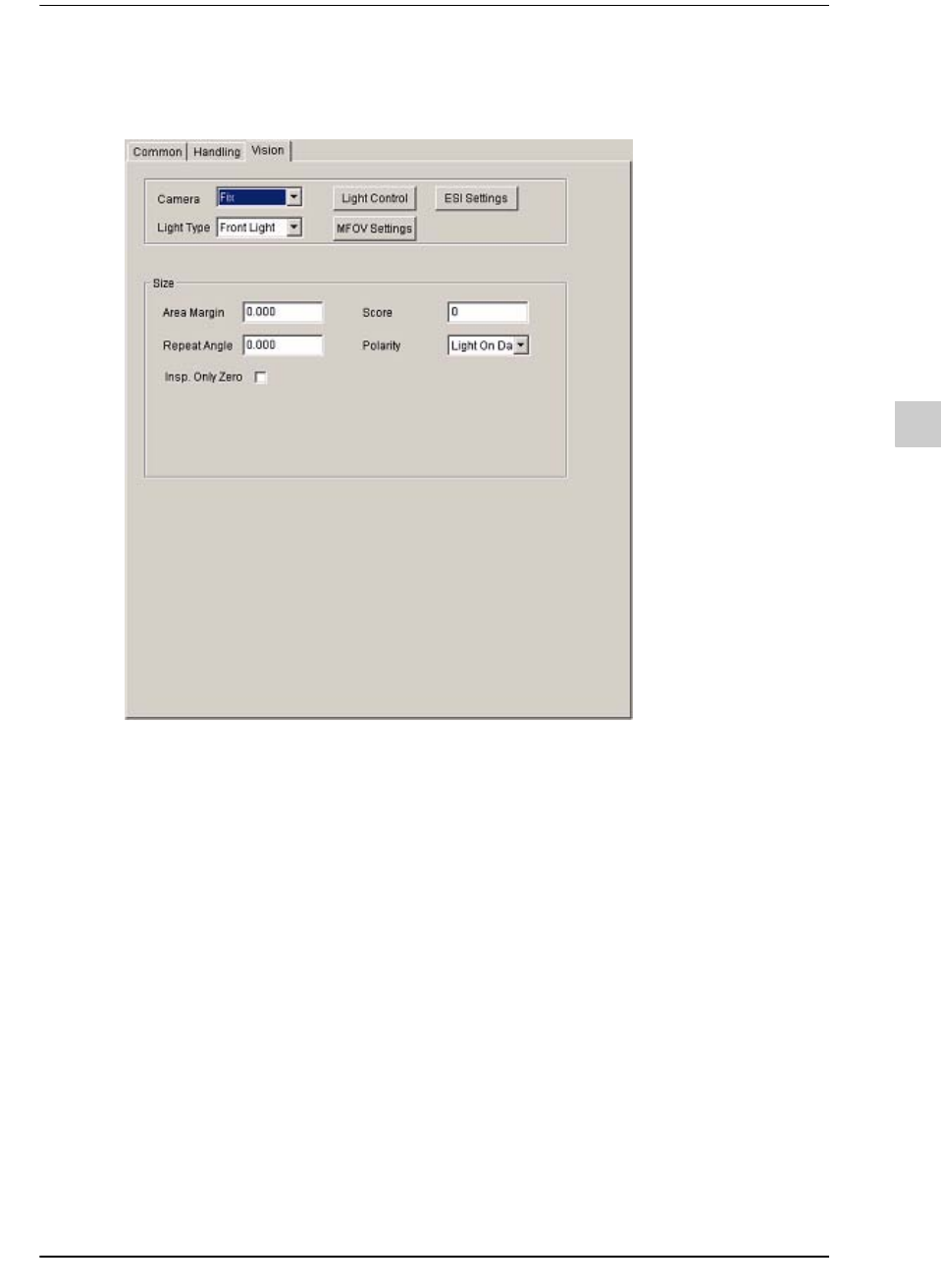
10.5.3.11.Odd Form
设定Odd Form元件的Align。
Odd Form是针对CP60系列设备进行异型元件作业时的元件群。上述元件在收到了
设备Camera的影像后设定元件数据,元件数据库编辑器与设备之间没有Interface,
因此无法直接编辑该元件群。
可以添加或删除Feature,但原则上的正确设定方法为,该元件群的数据应该在设备
进行输入并且从元件DB读入。
详细内容请参阅CP60手册。
Dark on Light
元件图像亮度低于背景时。
Light on Dark
元件图像亮度高于背景时。