2. SM471_Administrators_Guide(Kor_Ver1) - 第389页
12-73 Machine Calibration 11 . < G a nt ry > 콤보박스에서 Gantry2 를 선택하고 Gantry1 과 동일한 방식으로 캘리브 레이션을 수행하십시오 . 결과값은 System Setup 메뉴 의 Camera 대 화상자에서 확인할 수 있습니다 . 메 모 Fly Camera Offset 의 캘리브레이션 기준값은 다음과 같습니다 . (FOV 2 5 M…
12-72
Samsung Component Placer SM471 Administrator's Guide
8. Calibration이 완료되면, <Next> 버튼을 클릭하십시오.
9. “Next, Remove the Calibration No
zzle From Head 1. Click [Next] for Moving Down
Head. After Moving, Remove the Nozzle Manually.”라는 메시지를 나타냅니다. 헤
드 1 번의 노즐 홀더에서 Calibration Tool을 수동으로 제거하기 위해서 <Next> 버
튼을 클릭하십시오.
10. Head 2번에서 10번까지도 H
ead 1번에 대해서 Calibration을 수행한 것과 동일한
방법으로 Calibration을 수행하십시오.
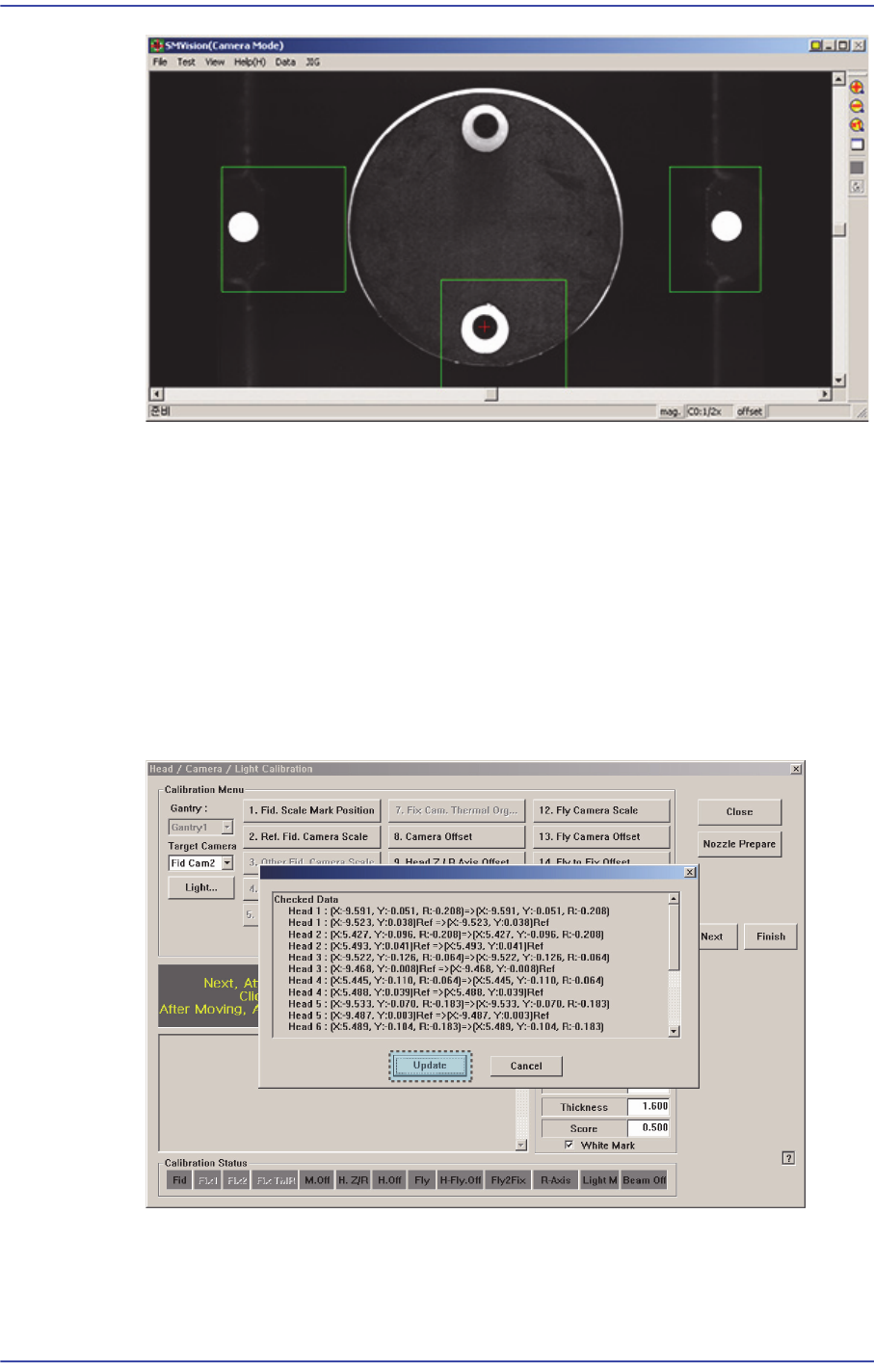
모든 헤드에 대해서 Calibration 절차
가 정상적으로 완료되면 다음 그림과 같은
결과값을 보여줍니다.
12-73
Machine Calibration
11. <Gantry> 콤보박스에서 Gantry2를 선택하고 Gantry1과 동일한 방식으로 캘리브
레이션을 수행하십시오.
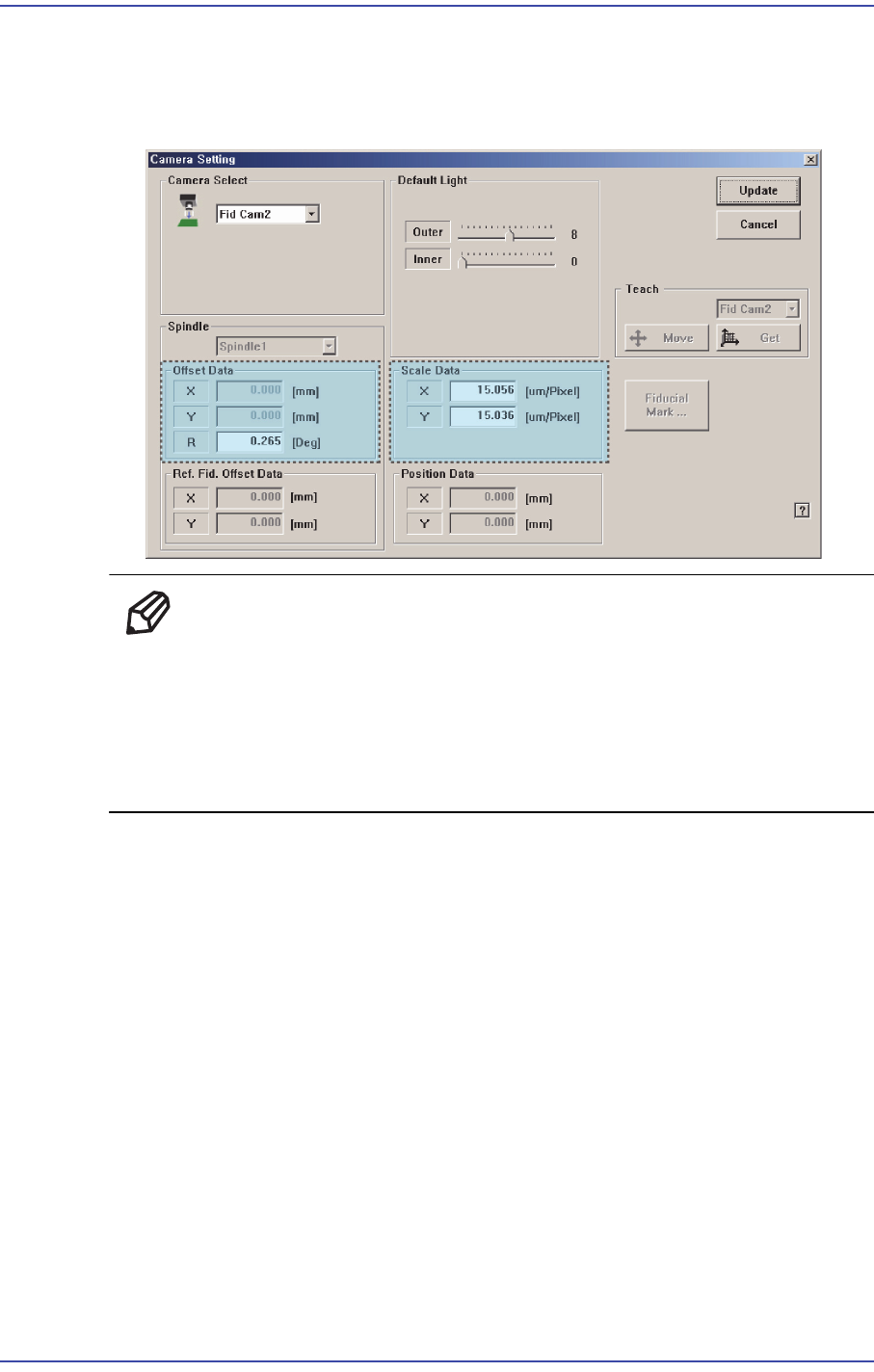
결과값은 System Setup메뉴
의 Camera대화상자에서 확인할 수 있습니다.
메 모 Fly Camera Offset의 캘리브레이션 기준값은 다음과 같습니다.
(FOV 25 MEGA) [단위 : X(mm) , Y (mm) , R (°) ]
Of
fset X: 0.60 ~ 0.60
Of
fset Y: 0.60 ~ 0.60
Of
fset R: -1.0 ~ 1.0

12-74
Samsung Component Placer SM471 Administrator's Guide
12.3.10.7. Fly to Fix Camera & Fly Runout Offset Calibration
Fly-Camera 에서 부품 인식 후 장착 시 부품정렬 높이와 장착 높이가 서로 다름으로
써 발생하는 Offset을 보상하기 위한 것입니다.
이때 발생
하는 Offset은 축의 휨, Run-Out등에 의한 것이다. 장착 높이와 같은
Fiducial Camera 의 인식 높이와 Fly-Camera의 인식 높이에서의 값을 각도에 따라 보
상합니다.
이 Calibr
ation을 수행하기 위해서는 먼저 작업 전에 전면 ANC의 Calibration Tool 위
치에 Calibtation Tool이 놓여 있는지 확인해야 합니다.
다음은 ‘Fly to Fix Of
fset’ 을 캘리브레이션하는 과정입니다.
1. <Nozzle Prepare> 버튼
을 클릭하여 수동으로 ANC 1 번 홀에 CN400노즐을 삽입
하십시오.
2. <Automatic Next> 체
크박스를 선택하고 <14. Fly to Fix Offset> 버튼을 클릭하면
자동으로 선택된 Gantry에 대해서 캘리브레이션을 수행합니다
<No Real Motion[Manual]> 체크
박스를 선택하고 캘리브레이션을 수행하면 수동
으로 각 헤드별로 노즐을 삽입하면서 <Next> 버튼을 클릭하여 다음 단계로 진행
합니다.
<Automatic> 또는 <
Manual> 중 어느 체크박스도 선택하지 않고 캘리브레이션을
수행하면 현재 선택된 헤드에 대해서 자동으로 노즐을 교환하지만 <Next> 버튼
을 클릭하여 다음 단게로 진행합니다 .
<14. Fly to Fix Offset> 버튼
을 선택하면 “First, We must Put all Nozzles From
Heads manually. To Moving Down Z Axis, Click [Next].” 라는 메시지가 나타납니
다. 헤드에 삽입되어 있는 모든 노즐을 수동으로 제거하기 위해서 헤드의 Z축을
하강시키려면 <Next> 버튼을 클릭하십시오.
3. 그러
면, Head Assembly가 장비의 지정된 위치로 이동한 후, 모든 Z축을 하강합