CX-1_OPE.pdf - 第208页
第 4 章 生产程序制作 13) 贴片真空停止偏移量 在贴片 Z 轴下降、真空也处于 ON 时进行设置。 在通常情况下,不能由用户来变更贴片时的真空 OFF 控制(机器参数项目)。 但是,可采用在此项目中输入真空停止前的经过时间的方法,来变更真空 OFF 的时间 (单位: ms)。 将鼠标的光标放在编辑框上,会出现下列图形 化提示窗口,显示真空停止时间、真空停止偏 移量、电磁阀 ON/OFF 状态。 移动高度 贴片高度 时间 真空停止时…
第 4 章 生产程序制作
7) 释放检查
检查激光定心元件贴片后,元件是否仍附在吸嘴上。
检查元件释放会影响节拍速度(需要在停止状态下进行)。所以通常情况下,请将
初始值设置为“不进行”。
8) 吸取位置校正(激光)
是以激光定心的带状元件为对象,根据激光识别结果来自动修正吸取位置偏差的功能。修正
的结果被反映到“吸取数据”的吸取坐标中。
如果选择吸取位置修正,则有时会因生产过程中吸取坐标变化而导致不能从生产
中途进行同时吸取。
9) 自动示教
只有包装方式为纸带、元件外形尺寸为0603~3216时才可设置为[执行]。除此以外,常
设状态为[不执行]。
设置为[执行]后,在跟踪吸取位置时自动示教。
10) 元件忽略
把元件忽略设置为“是”,则生产时指定的元件将被跳过不进行贴片。
指定跳过的元件贴片行,虽然生产时不进行贴片,但不列入未贴片列表中。
从数据库读入元件信息时,“元件忽略”数据被更改为“否”。
11) MTS 标记识别
使用MTS时,如果将吸取基准位置标记识别设为“进行”,则在拉出安置有设置元件的托盘时,
进行吸取基准位置标记的识别,修正吸取、元件返回等执行坐标。
如果选择“进行”,可提高吸取精度,但识别要花时间。
12) 元件层
设置元件层,排列同一贴片层内各元件的优先顺序。
这项设置仅在进行优化顺序的生产时有效。
此外,与贴片层不同,元件层不变为元件用尽暂停状态。
请右击一览表中所显示的层1(优先度高)到层7(优先度低),
进行选择设置。
4-45
第 4 章 生产程序制作
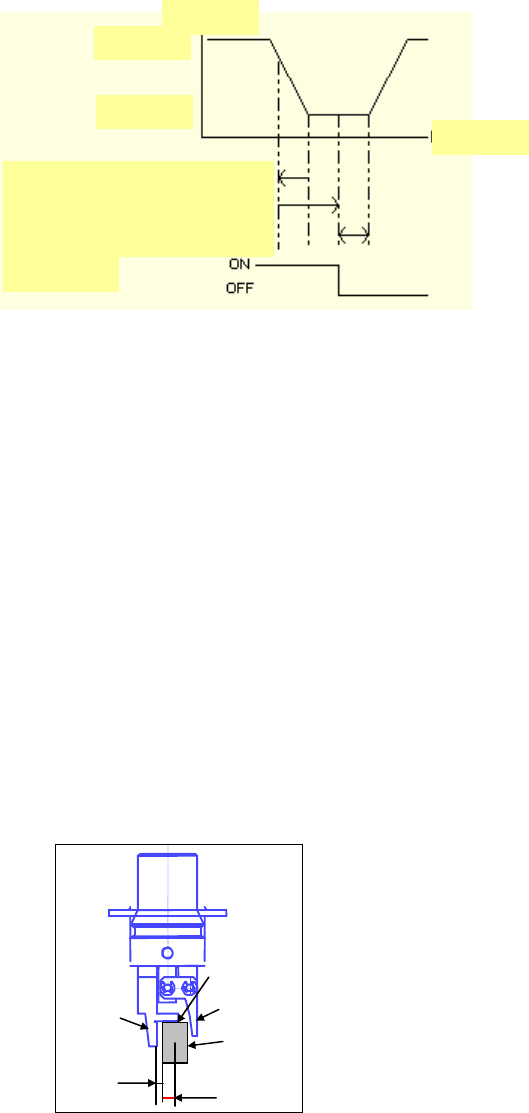
13) 贴片真空停止偏移量
在贴片 Z 轴下降、真空也处于 ON 时进行设置。
在通常情况下,不能由用户来变更贴片时的真空 OFF 控制(机器参数项目)。
但是,可采用在此项目中输入真空停止前的经过时间的方法,来变更真空 OFF 的时间
(单位: ms)。
将鼠标的光标放在编辑框上,会出现下列图形化提示窗口,显示真空停止时间、真空停止偏
移量、电磁阀 ON/OFF 状态。
移动高度
贴片高度
时间
真空停止时机 15ms(固定值)
真空停止偏移量 200ms
真空切断等待时间 5ms(固定值)
真空电磁阀
Z 轴高度
真空停止偏移量的提示
* 真空停止时机、真空切断等待时间不能变更。
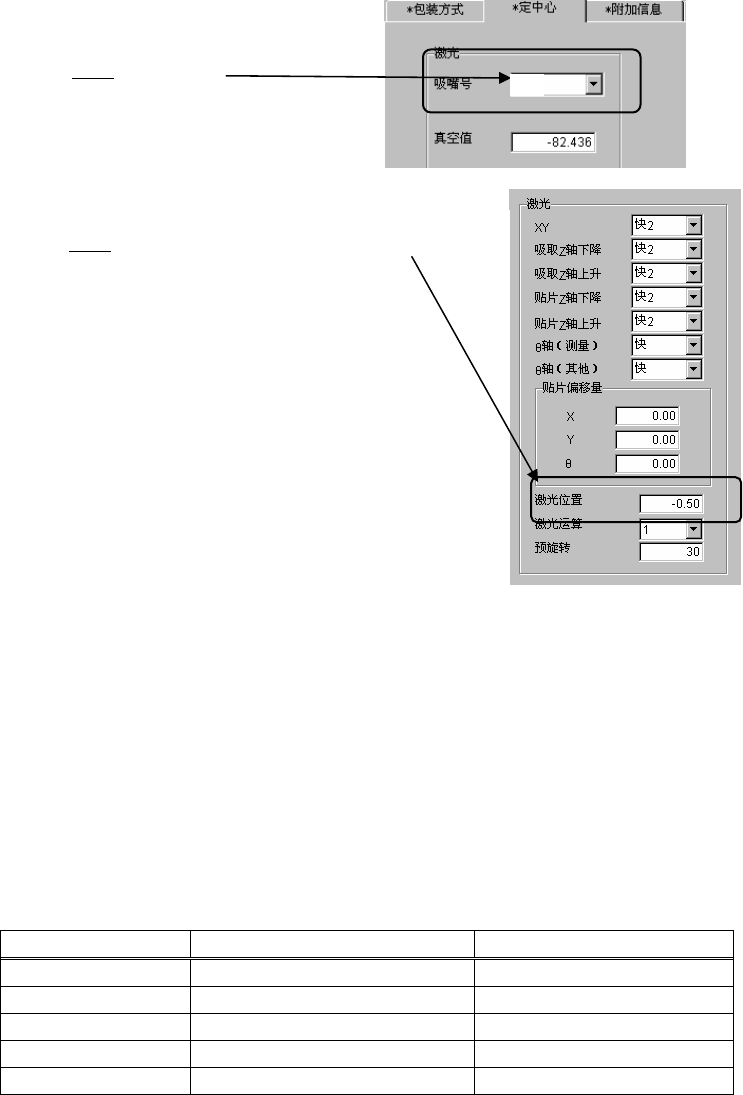
14) 夹持吸嘴数据
是用于设置夹持吸嘴(选购件)的项目。
① 抓取位置: “Y”项,元件中心与夹持吸嘴固定侧手臂抓取面中心的偏移值(见图
1a),输入负数(-a)。但“X”项只可输入 0,不可输入其他数据。
② 水平间隙∶ 夹持吸嘴固定侧手臂抓取面与元件之间的间隙(见图 1b),输入负数
(-b)。因吸嘴型号、吸嘴方向不同,移动方向不同,务请注意。
通常设置自动输入的默认值。
③ 吸取时吸嘴方向∶ 是指元件以0度供应、吸取时的吸嘴方向。请指定0度、90 度、180
度、270 度中的一项。
④ 调整吸取高度: 吸取时吸取高度的偏移值(c 与元件上底面之间的间隙)。
通常,为了保持元件的水平,设为-0.5mm。
a
元件
c
摇 臂
固定臂
b
图1
4-46
第 4 章 生产程序制作
<使用夹持吸嘴时的设置项目>
除上述“吸嘴数据”外,夹持吸嘴的下述设置与通常的元件不同。
i) 使用新夹持吸嘴时,先通过“机器设置”中的“文件”/“吸嘴数据读出”,从 FD 读入
夹持吸嘴的信息。
ii) 将吸嘴安装到 ATC 上。
将夹持吸嘴安装到 ATC 单元上,从正面看,夹持吸嘴的固定臂应在后面,摇臂应在近前。
iii) 设置元件数据。
a. 设置
吸嘴编号
吸嘴编号为 800 多号。
b. 设置激光高度
指定
从固定臂前端到激光面的距离。
设置基准:
—(元件高度-3.5mm
※
)/2,
根据引脚位置进行微调。
※ 图 1 的 c 至固定臂的距离=3.5mm
例:元件高度为 5mm 时
-(5-3.5)/2=-0.75mm
图 4 -5-2-9 -3
800
iv)设置吸取数据。
XY与通常的示教方法相同。由于Z是利用在机器设置中登录的吸嘴信息与元件高度自动计算
的,因此无需示教。
15) 指定裸芯片
可在方形芯片、外形识别元件、FBGA、通用图像、其他元件时进行设置。
编辑中的元件为裸芯片时,请点击单选按钮设置为“执行”。
对裸芯片元件,元件数据、图像数据的初始值变更为下列数值。
表 4-3-5-3 指定为裸芯片后有变更的初始值
区分 项目 设置数据
元件数据 Z轴动作 贴片下降 FC速度
元件数据 Z轴动作 贴片上升 低速
元件数据
θ
轴动作(激光/图像)
低速
元件数据 激光高度的计算方法 -0.4×元件高度
图像数据 外形识别元件的识别种类 4边高精度矩形元件
4-47