MAN00000772_SI-G200BB_SVCPDFA.pdf - 第211页
HLGB-10304-01 Auto Calibration (Recognition of relationship betw een PW B coordinate and mechanism coordinate) [Necessary jigs] Calibration data FD Ball point jig Positioning pins for ball point j ig [Procedure] Make sur…
HLGB-10303-01
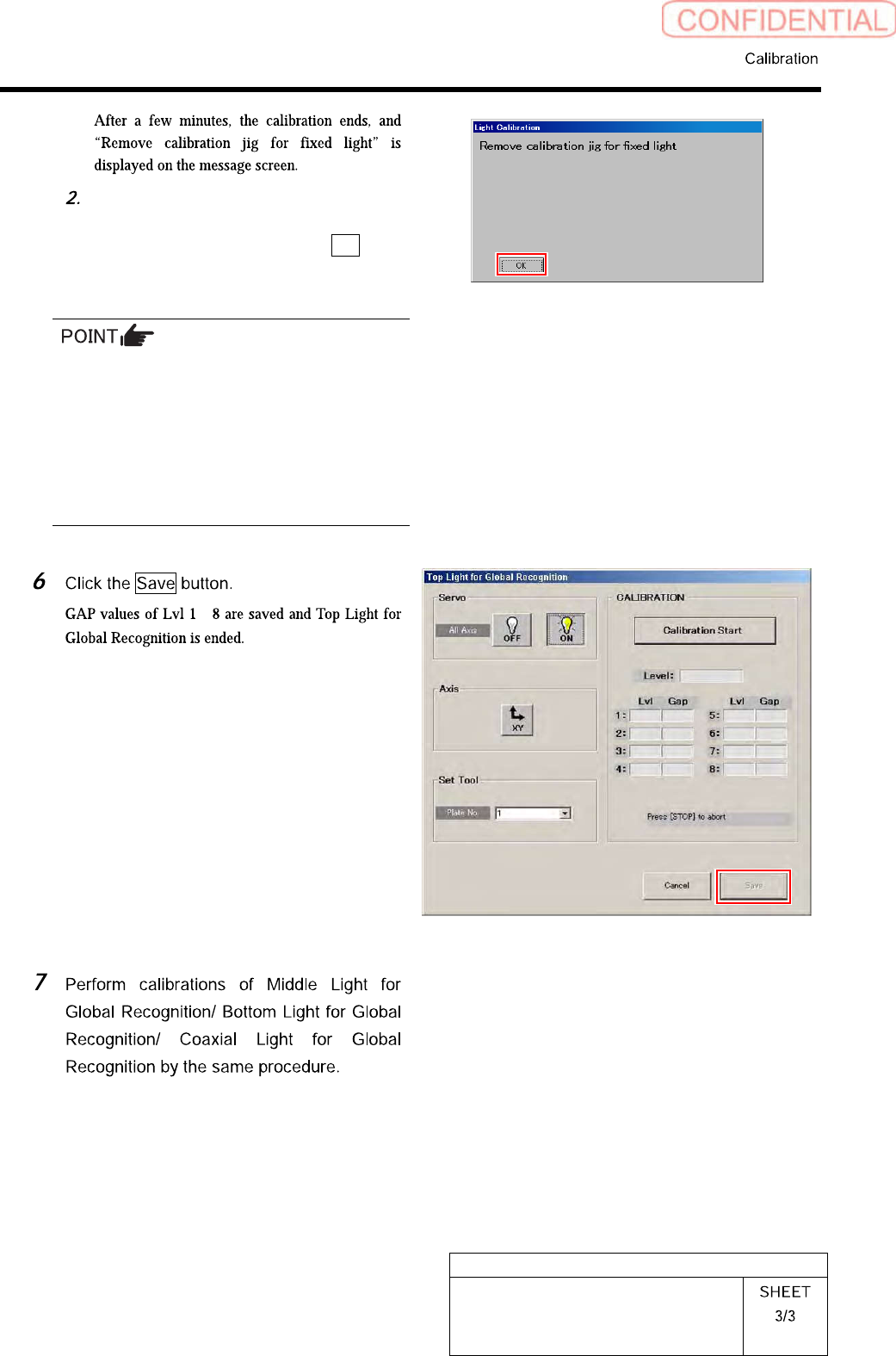
Light calibration for Global
Recognition
Remove the fixed camera light
calibration jig and the reflection
intensity spacer and click the OK
button.
・ When subsequently performing calibrations
of Middle Light for Global Recognition/
Bottom Light for Global Recognition/ Coaxial
Light for Global Recognition, it is
unnecessary to remove the jig.
・ When ending calibration, be careful of
forgetting to leave the reflection intensity
spacer.
~
HLGB-10304-01
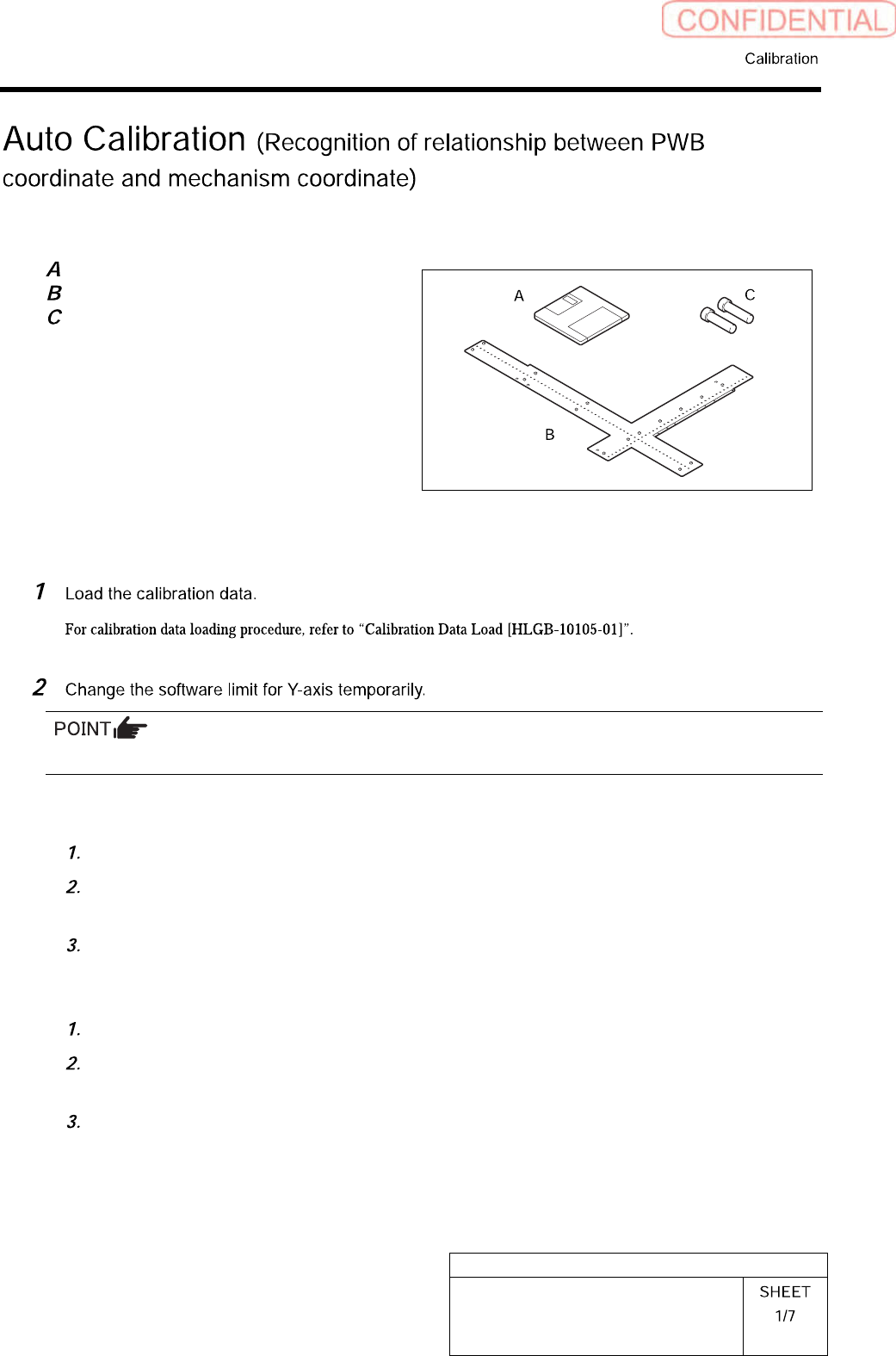
Auto Calibration
(Recognition of
relationship between PWB coordinate and
mechanism coordinate)
[Necessary jigs]
Calibration data FD
Ball point jig
Positioning pins for ball point jig
[Procedure]
Make sure to take a note of the original value before changing it.
<To execute calibration with the front head>
Open “c:¥asm¥mcdata1¥ac_param.ini” with WordPad.
Add the absolute value 100 to “SOFT_LIMIT_PLUS” and “SOFT_LIMIT_MINUS” of
[AC_Y] respectively.
Save (overwrite) the file, and then restart the system.
<To execute calibration with the rear head>
Open “c:¥asm¥mcdata2¥ac_param.ini” with WordPad.
Add the absolute value 100 to “SOFT_LIMIT_PLUS” and “SOFT_LIMIT_MINUS” of
[AC_Y] respectively.
Save (overwrite) the file, and then restart the system.
HLGB-10304-01
Auto Calibration
(Recognition of
relationship between PWB coordinate and
mechanism coordinate)
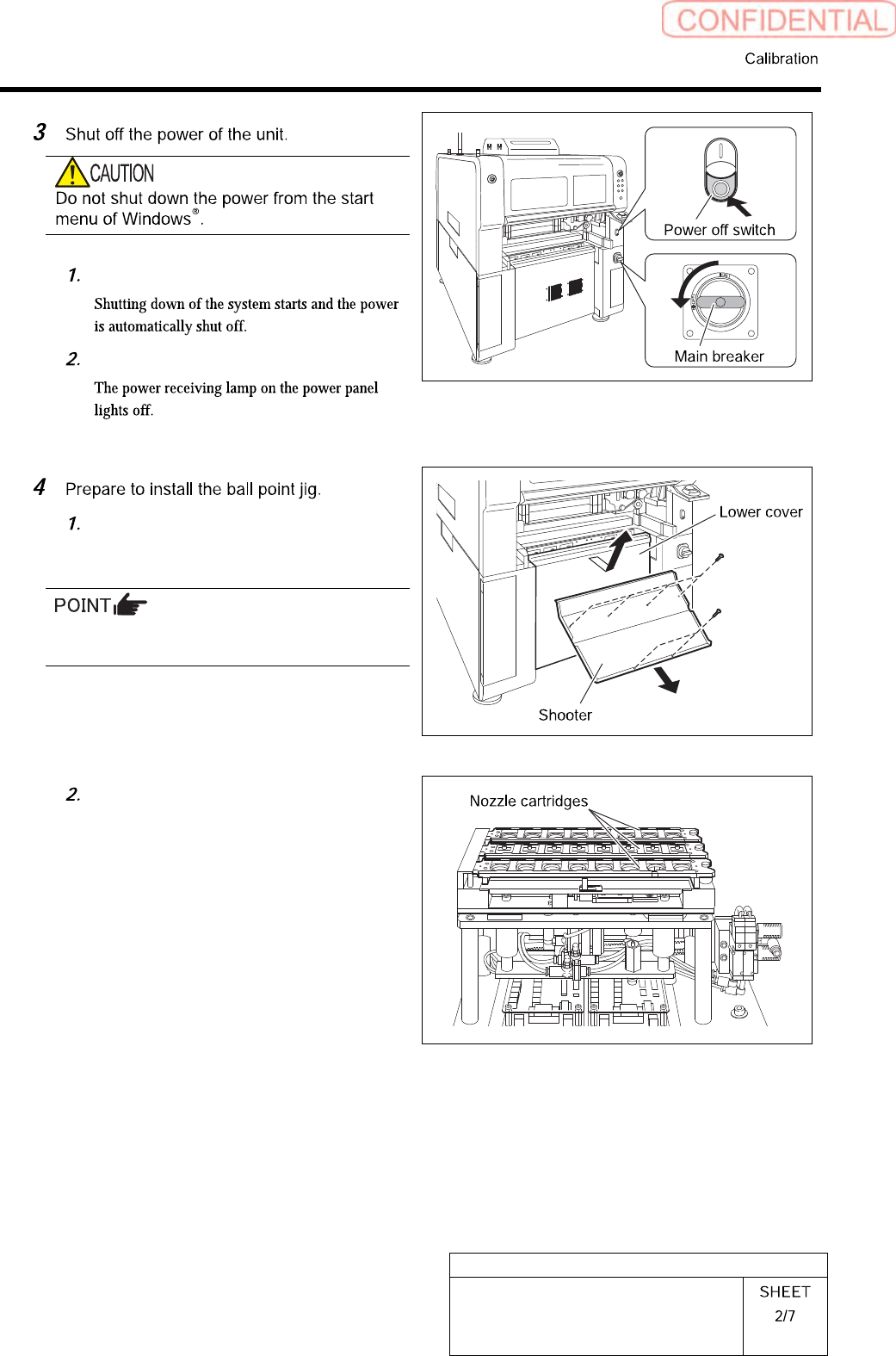
Press the power off switch.
Turn off the main breaker.
Remove the Lower cover and the
shooter from the front and rear side of
the unit.
Tile the lower cover slightly toward you and pull
the fan cable to remove the lower panel.
Remove all the nozzle cartridges from
the rear side of the unit.