MAN00000772_SI-G200BB_SVCPDFA.pdf - 第291页
HLGB-10402-01 Matching of Y Axis Z-Ph as e Manually m ove the Y axis backward to the position where th e dog leav es the ORG sensor . Manually move the Y a xi s forw ard little by little and stop at the boundary position…
HLGB-10402-01
Matching of Y Axis Z-Phase
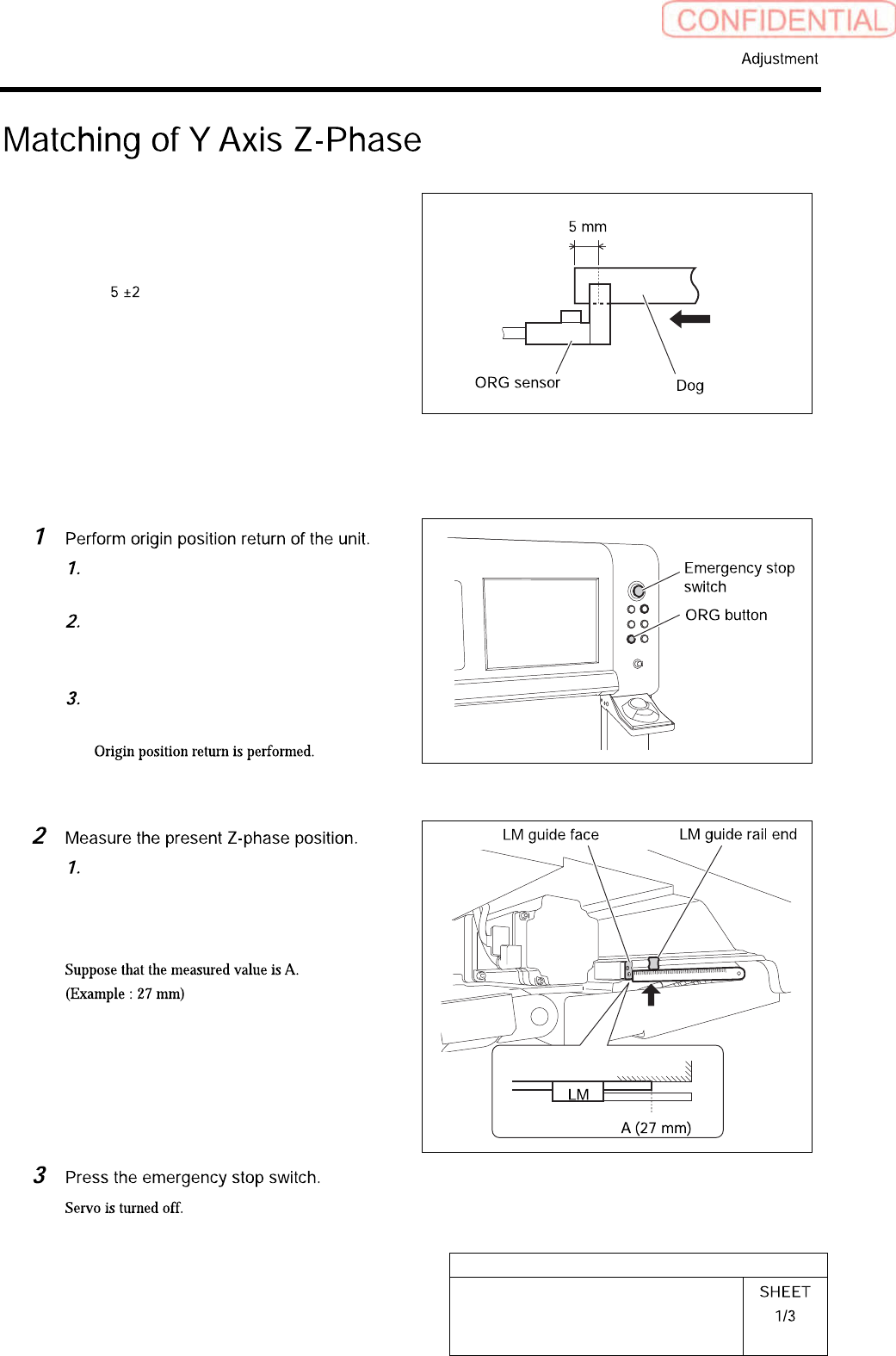
This section describes a procedure to adjust a position
of the Z-Phase so that the motor stops at a position
(Z-Phase setting position) where the ORG sensor
detects the dog, then moves to the Y-CCW sensor side
(front side) by mm when origin return is
performed, by taking Y axis on the front head side as
an example.
Also match the Z-Phase for the Y axis of the rear head
side by the same procedure.
[Procedure]
Close the front and rear doors in order
to prevent danger.
Prepare to press the emergency stop
switch so as to immediately stop the
unit.
Press the [ORG] button on the
operation panel.
Measure the distance from the LM
guide rail end to the LM guide face
with a scale.
HLGB-10402-01
Matching of Y Axis Z-Phase
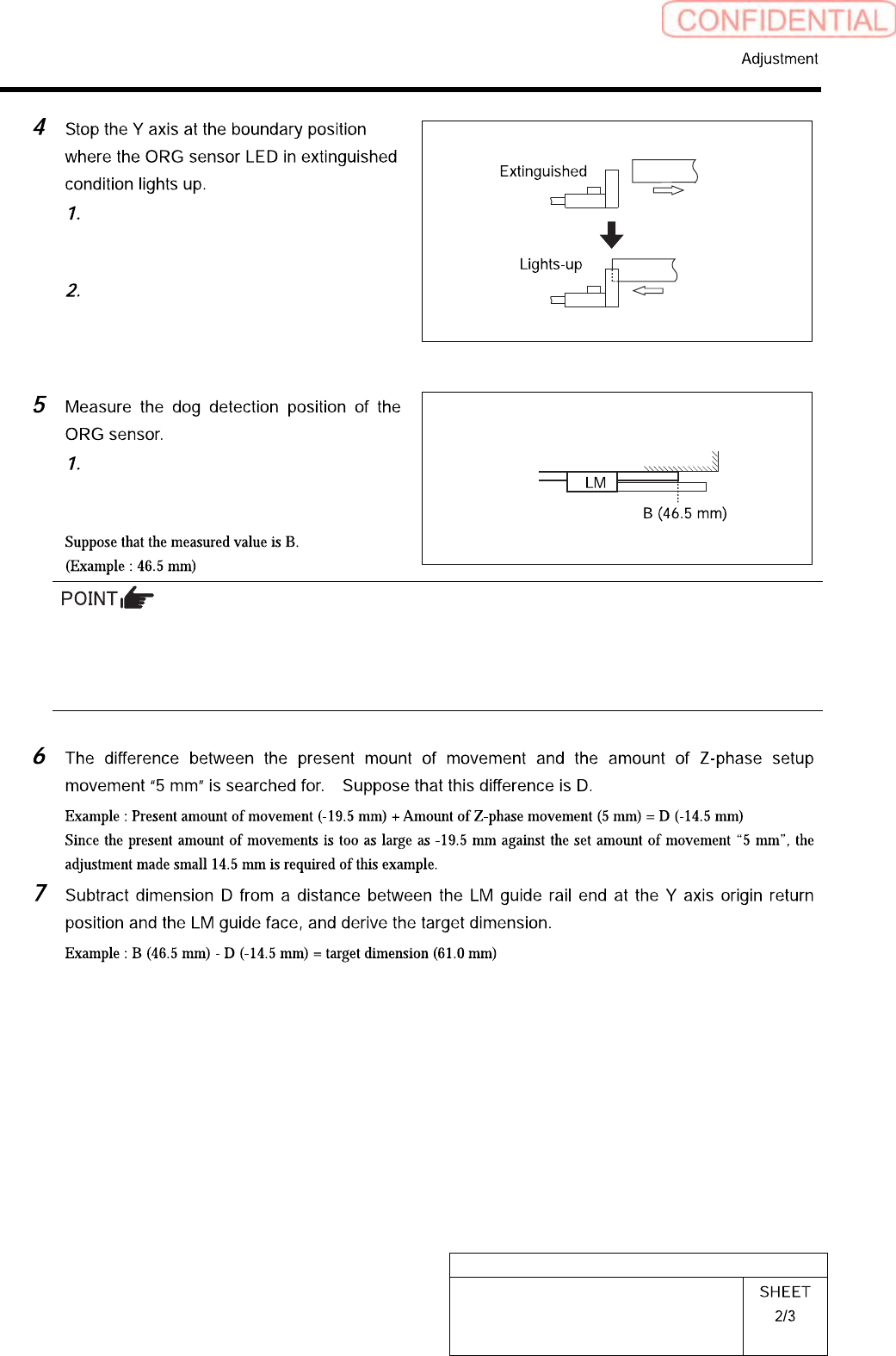
Manually move the Y axis backward to
the position where the dog leaves the
ORG sensor.
Manually move the Y axis forward
little by little and stop at the boundary
position where the ORG sensor LED in
extinguished condition lights up.
Measure the distance from the LM
guide rail end to the LM guide face
with a scale.
By 2 times of measurements, the amount of movements from the dog detection position of an ORG sensor
to the present Z-phase position can be found.
Suppose that the present amount of movement is C.
Example : A (27 mm) - B (46.5 mm) = C (-19.5 mm)
HLGB-10402-01
Matching of Y Axis Z-Phase
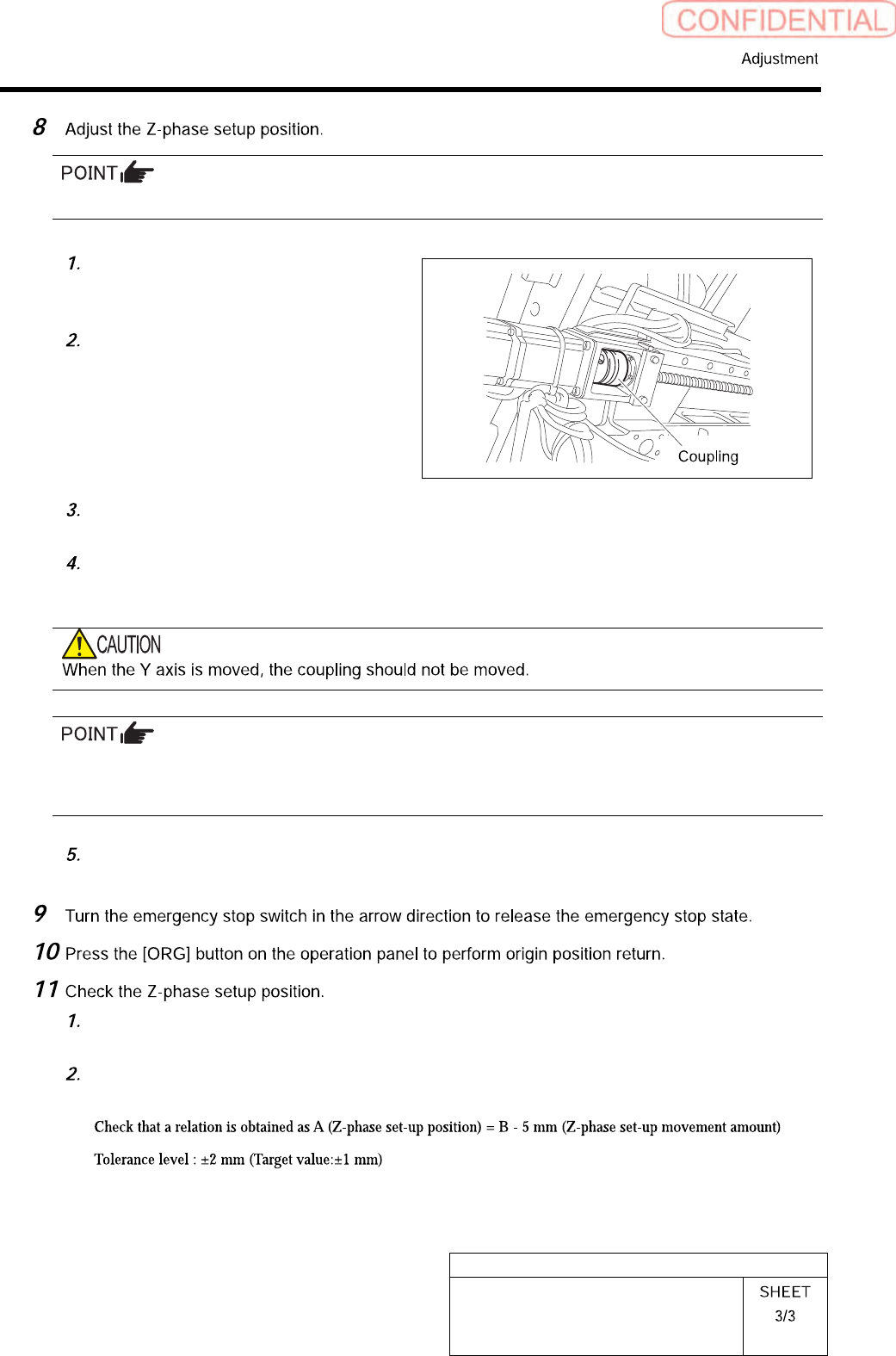
Adjust the Z-phase setup position by adjusting the positional relation between the motor and ball screw.
Move the rear head to the center of Y
axis to secure working space to loosen
the coupling screws.
Loosen the M5 screw located on the
ball screw side of the coupling for the
front Y axis.
One of workers should hold the coupling for the front Y axis located on the unit rear side so
as to prevent the coupling from moving.
The other worker should adjust the Y axis so that a distance between the LM guide rail end
on the unit front side and the LM guide face becomes the target dimension (61mm) derived
by the procedure 7.
If the difference between the present amount of movements and the amount of Z-phase setup movement is
positive, move the Y axis to the CCW sensor side (front direction), and if the difference is negative, move it
to the CW sensor (rear direction).
Fasten the screw M5 on the ball screw side of the coupling with a torque driver.
Tightening torque :7.0 N・m
Measure the distance from the LM guide rail end to the LM guide face with a scale.
Suppose that this measured value is A.
Measure the dog detection position of the ORG sensor with a scale. Suppose that the
measured value is B.