SM481_Introduction(Chi_Ver1).pdf - 第77页
6-3 Module Function 图 6.3 P CB 传送系统 ( Conveyor System ) 的结构图 6.3.2. 功能 各构成部分的功能如下。 Conveyor Module Entry Shuttle Conveyor Frame, W ork Conv eyor Frame, Exit Shu ttle Conveyor Frame 成为 PCB 移动过程的基本 , 各 Unit 上附着各种 Part 。 …
6-2
Samsung Component Placer SM481 Introduction
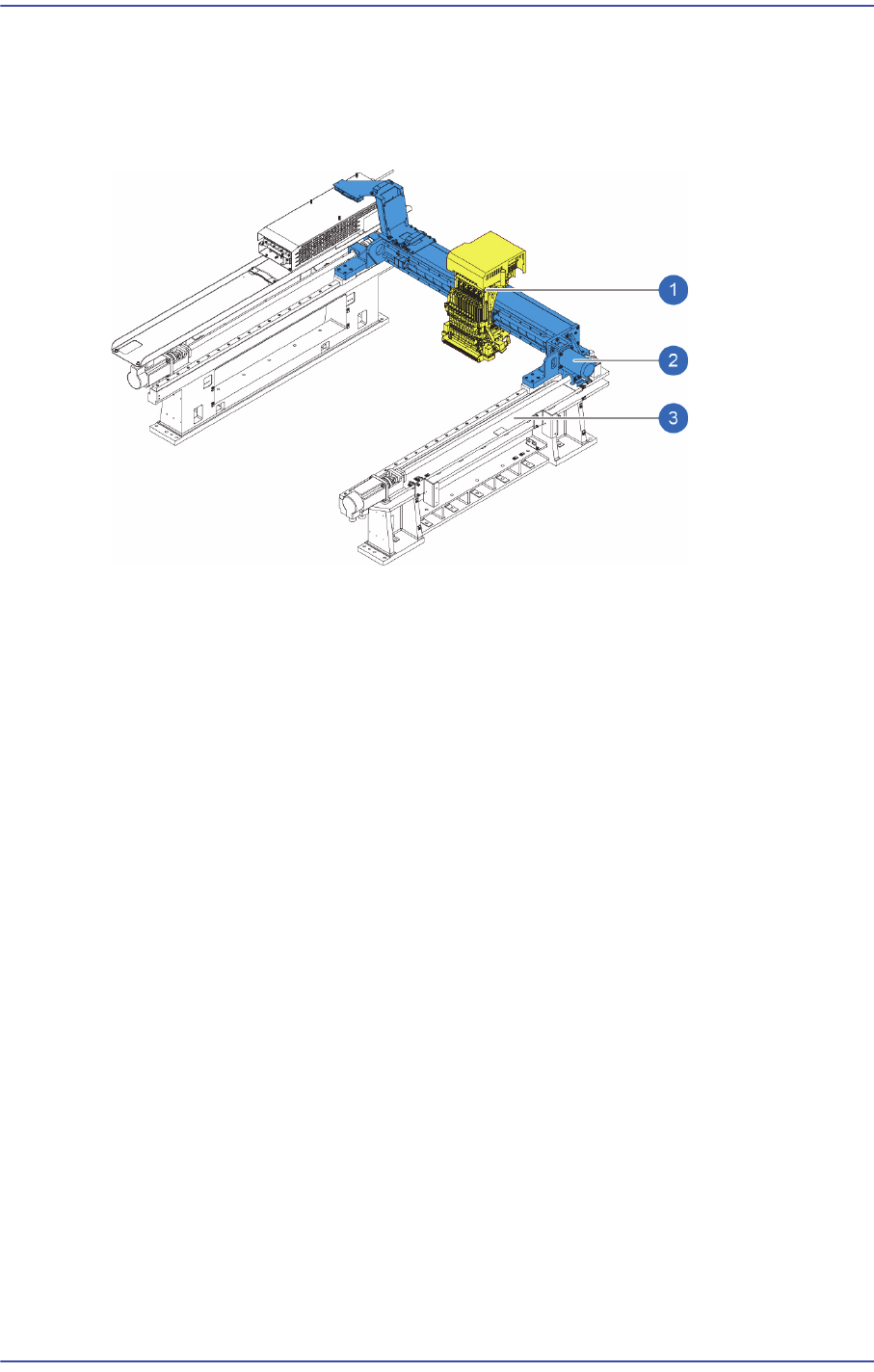
6.2. X-Y 框架部分
6.2.1. 结构
图
6.2 X-Y
框架部分
1: Head
2: X Frame
3: Y Frame
6.3. PCB Transport System
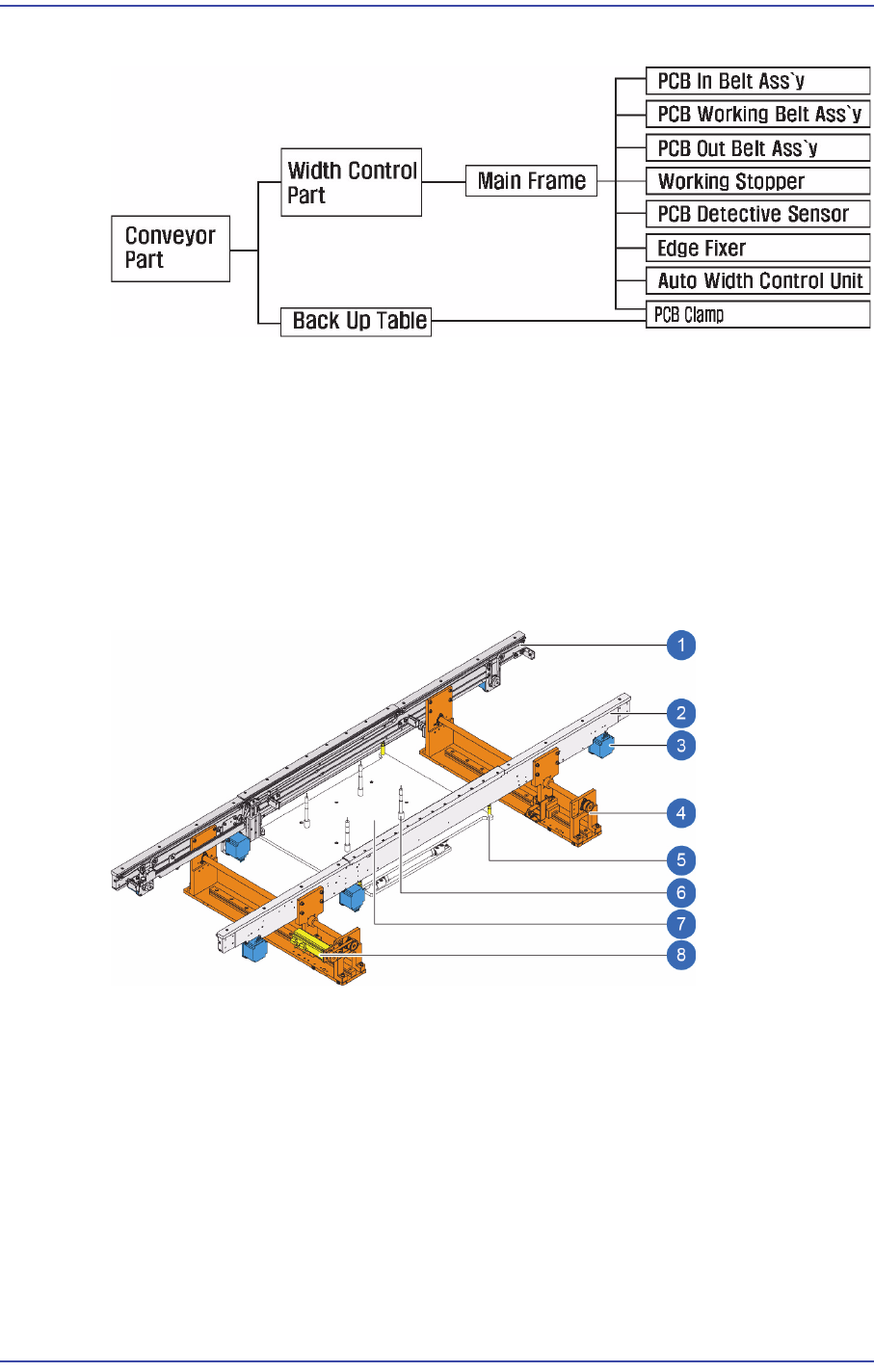
6.3.1. 构成
PCB传送系统负责输送来自前段设备的基板,为贴装元件定位并固定基板。
PCB Transport System分成3 段而得以大幅缩短PCB更换时间,采取固定PCB 的上表
面的方式而提高了PCB 的平坦度。
从小型PCB((L)50.0mm×(W)40.0mm)到大型PCB((L)740.0mm×(W)460.0mm),可 以
处理较大范围的PCB。
请参考 “2.6.1 PCB 的规格,弯曲允许误差“ 。
PCB传送系统的构成分为如下。
6-3
Module Function
图
6.3 PCB
传送系统(
Conveyor System
)的结构图
6.3.2. 功能
各构成部分的功能如下。
Conveyor Module
Entry Shuttle Conveyor Frame, Work Conveyor Frame, Exit Shuttle Conveyor Frame
成为PCB移动过程的基本,各Unit上附着各种Part。
图
6.4 PCB Conveyor Module
1: Fix Frame
2: Move Frame
3: PCB Flow Motor
4: Conveyor Width Control Unit
5: PCB Clamp
6: Backup Pin
7: Backup Table
8: Conveyor Width Motor
PCB 感应 Sensor Assembly
检查Conveyor上各区间是否有PCB的作用。 具有感知Entry Shuttle, Front Work,
6-4
Samsung Component Placer SM481 Introduction
Rear Work 及Exit Shuttle 各Unit的In和Out的传感器, 可显示稳定的PCB移动过
程。
Belt Assembly
由Step Motor 和平Belt组成, PCB 传送带分为各Unit分别驱动.在 Working Area 利
用Belt,可对PCB进行Clamping。
宽度调整部件
根据PCB 的不同尺寸,调整道轨的宽度。它由 LM Guide 和丝杆(Lead Screw),
Screw, Motor , 位置感应传感器 组成。
注 意 在未检查传送装置(Conveyor) 干涉或传送装置(Conveyor)内是
否有异物时调整传送装置(Conveyor) 宽度会损伤传送装置
(Conveyor)。确保在调整传送装置(Conveyor)宽度前检查传送装
置(Conveyor)干涉或传送装置(Conveyor)内是否有异物。
PCB 感应传感器
确认传送装置(Conveyor) 上的PCB的位置。
边缘固定器(Edge Fixer)
PCB到达工作位置后开始工作之前,作为保障PCB的正确位置的一种方法,通
过把PCB 推到一个边缘的方法,使PCB以一边为基准确定位置。
PCB的夹紧(Clamp)
PCB达到操作位置而进行操作之前,起着矫正位于Belt上的PCB,而且和Back
Up Table连动运转。
工作台(Backup Table) (BUT)
PCB到达工作位置后开始工作之前,为了保证PCB的平面度,上升后通过
BackuPPin使PCB Clamp, Hole Fixer 等工作来定位PCB。
警 告 在操作工作台时可能会因工作台上的异物及器具干涉损伤传送
装置(Conveyor)。请在清除工作台上的异物后进行操作。
BUT Table分解时请接受 C/S联系。