SM481_Introduction(Chi_Ver1).pdf - 第80页
6-6 Samsung Component Place r SM481 Introduction 6.5. PCB 坐标的补偿功能 ( 基准点的识别 ) 此功能是设备上的动态摄象机 ( Moving Camera ) 先读取 PC B 上的 Fiducial Mark( 基 准点标记 ) 后, 与已输入的 Fiducial Mark( 基准点标记 ) 的位置作 比较的方法来补偿 贴装点的位置误差。 其他方法有全面 ( Global ) …

6-5
Module Function
6.4. 部品吸着不良的检测
用真空吸着部品时,真空传感器(Vacuum Sensor)通过检测真空压力的变化来感应
吸着不良。吸着部品时的真空压力值基本上都用吸嘴来设定。如果需要安全的吸
着,也可适当调整每个吸嘴的吸着真空压力。
6-6
Samsung Component Placer SM481 Introduction
6.5. PCB坐标的补偿功能 (基准点的识别)
此功能是设备上的动态摄象机(Moving Camera)先读取PCB上的 Fiducial Mark(基
准点标记)后,与已输入的 Fiducial Mark(基准点标记) 的位置作比较的方法来补偿
贴装点的位置误差。
其他方法有全面(Global)补偿和局部(Local)补偿两种方法
全面补偿
以PCB内的一点或两个点为准,补偿贴装点的位置误差。 Array PCB时, 对Array
PCB内的各个小型PCB可进行补正。 (Board定义有关设定项目中使用于 Fiducial
Mark的设定.)
局部补偿
识别PCB 内的重要元件上标记的Fiducial Mark, 可对相应元件的贴装位置进行
补正。 (在Step Program 使用于为贴装位置补正的Fiducial Mark 设定。)
备注 基准点标记的识别坐标误差补偿是在PCB上有基准点标记时才
能可以进行。
先对各PCB 作全面补偿后,再对部品作局部补偿,可对部品的位
置补偿作得更准确,这样才可以作PCB的固定和贴装工作。
在它的基准点标记的识别上有自己的限制。 请与本公司C/S 公司
(STS)或当地代理店(Local Agent)资讯。
6-7
Module Function
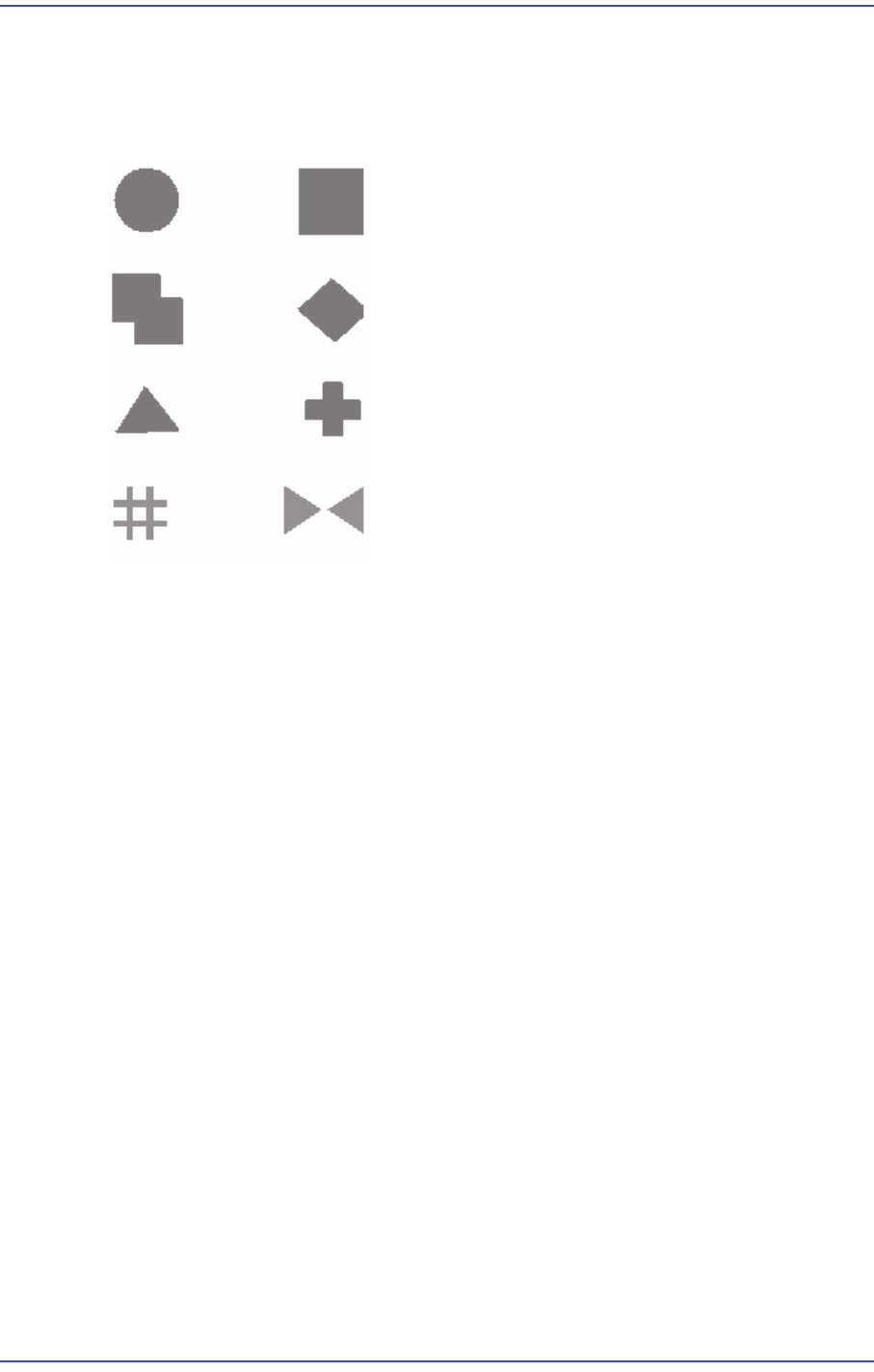
6.5.1. Fiducial Inspection(基准点的检查)
6.5.1.1. 基准点的类型
图
6.5
基准点的类型
重影(Repeatability): ± 5 m
分辨率(Resolution): 43 m/pixel ±5%
图象处理速度(Image processing speed): 100 msec (ø 2mm 圆)
6.5.1.2. 基准点标记的尺寸和允许公差
各基准点标记的外廓尺寸为 0.5mm ~ 4.0mm,其允许误差是10% 以内。
6.5.1.3. 空隙区域 (Clearance Area)
在基准点标记的周遍应有没有任何标记(焊盘, 焊锡, 记号)的四角形空隙区域。空隙
区域应确保从标记的(圆柱面)外面0.5mm 以上的面积。也就是说基准点标记的周
围 0.5mm 以内不应有任何记号。