00193921-03.pdf - 第125页
Betriebsanleitung SIPLACE HF-Serie 3 Technische D aten Softwareversion SR.50x. xx Ausgabe 01/2006 DE 3.7 Bestückköpfe 125 3.7.3.1 Beschreib ung Der 6-Segm ent-Co llect&Pla ce-Kopf ar beitet ebe nfalls na ch dem Col l…
3 Technische Daten Betriebsanleitung SIPLACE HF-Serie
3.7 Bestückköpfe Softwareversion SR.50x.xx Ausgabe 01/2006 DE
124
3
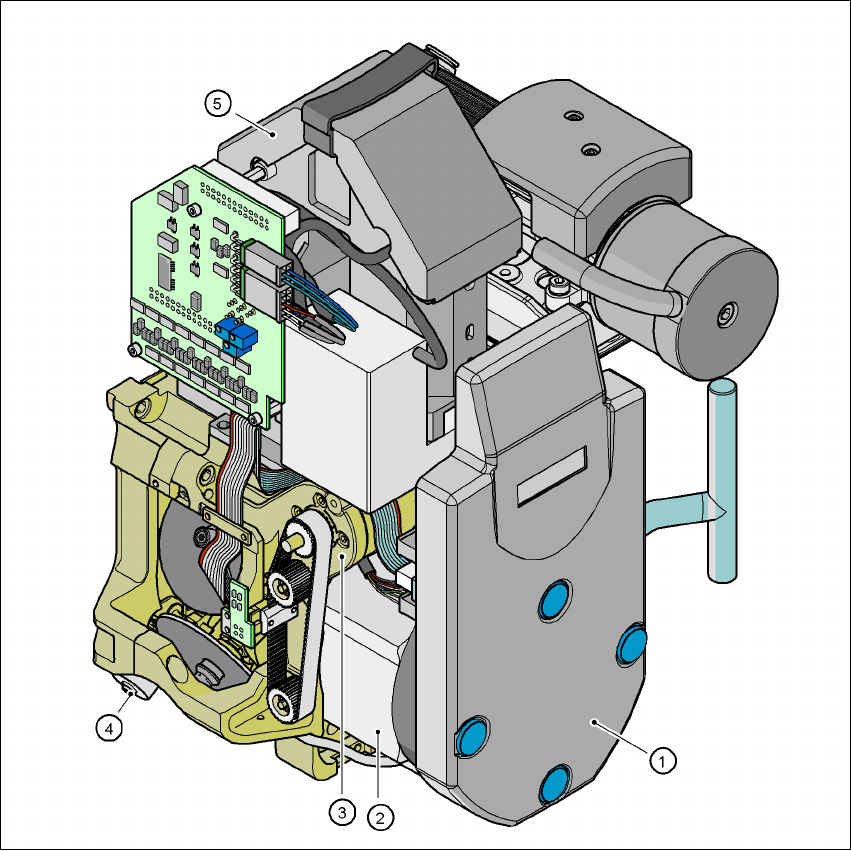
Abb. 3.7 - 7 6-Segment-Collect&Place-Kopf - Funktionsgruppen Teil 2
3
(1) Zwischenverteilerplatine, unter der Abdeckung
(2) Sternantrieb - DR-Motor
(3) Z-Achsenmotor
(4) Ventilstellantrieb
(5) BE-Kamera 39 x 39
Betriebsanleitung SIPLACE HF-Serie 3 Technische Daten
Softwareversion SR.50x.xx Ausgabe 01/2006 DE 3.7 Bestückköpfe
125
3.7.3.1 Beschreibung
Der 6-Segment-Collect&Place-Kopf arbeitet ebenfalls nach dem Collect&Place Prinzip. Mit dem
Standard-BE-Visionmodul bestückt der HF-Automat Bauelemente mit einer Kantenlänge von
32 mm nicht nur genau, sondern auch sehr schnell. Sein Einsatz empfiehlt sich daher bei größe-
ren Anteilen von IC in den zu fertigenden Produkten. Gerade im Hauptanwendungsbereich von
PLCC 44 bis zu QFP 208 führt er zu einer erheblichen Leistungssteigerung. 3
Mit Hilfe des DCA-Visionmoduls kann der 6-Segment-Collect&Place-Kopf Bauelementegrößen
von 0,6 x 0,3 mm² bis 13 x 13 mm² optisch zentrieren und bestücken. Beim Bestücken von High-
Speed Flip-Chips und Bare-Die Bauelementen optimiert das DCA-Visionmodul die Geschwindig-
keit und die Genauigkeit. Die Werte finden Sie in der Tabelle auf Seite 127
. 3
Kontroll- und Selflearning-Funktionen 3
Die Kontroll- und Selflearning-Funktionen, die auf Seite 120 für den 12-Segment Collect&Place-
Kopf beschrieben sind, treffen auch für den 6-Segment-Collect&Place-Kopf zu. 3
3.7.3.2 Funktionsbeschreibung
3
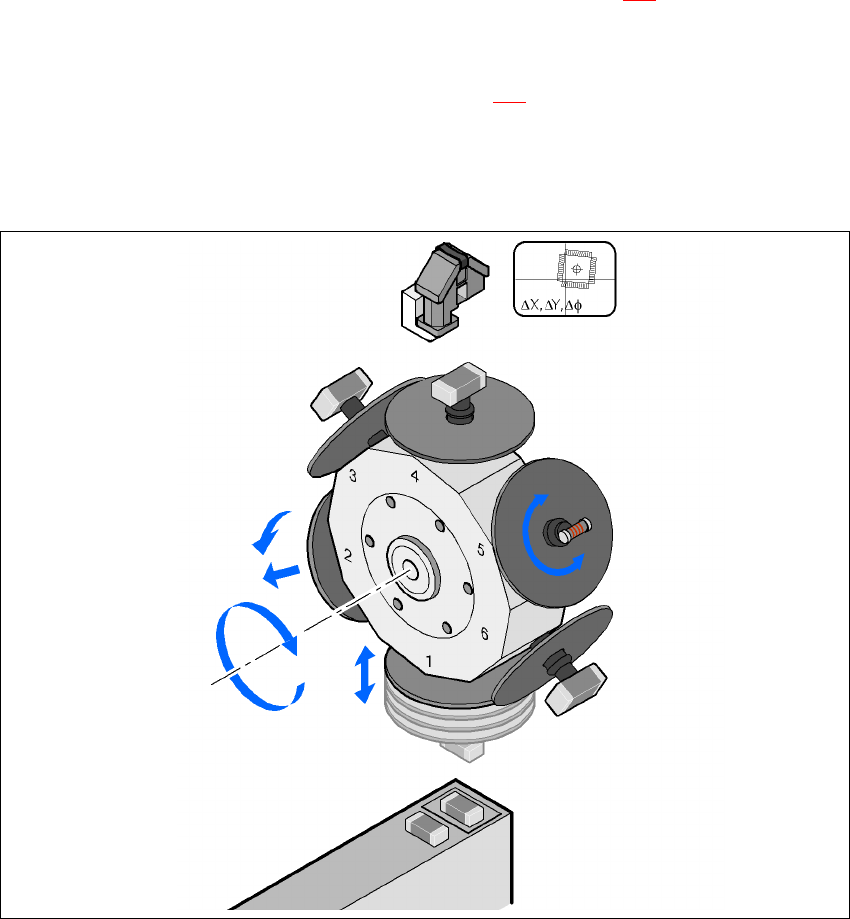
Abb. 3.7 - 8 Funktionsbeschreibung
BE-Kamera
DP-Achse
BE in Bestück-
lage drehen
Pinole abziehen
oder einsetzen
Z-Achse
BE abholen
oder bestücken
Stern-Achse
Sternrotation
BE abwerfen
3 Technische Daten Betriebsanleitung SIPLACE HF-Serie
3.7 Bestückköpfe Softwareversion SR.50x.xx Ausgabe 01/2006 DE
126
Æ Der 6-Segment-Collect&Place-Kopf besitzt drei Achsen, die DR- oder Sternachse, die Z- und
die DP-Achse.
Æ Der Stern rotiert mit seinen 6 Segmenten um die Stern-Achse. Die Segmente sind Träger
der Pinolen. Auf jeder Pinole sitzt eine Pipette. Damit werden die Bauelemente angesaugt
und von der Abhol-/Bestückposition (1), zur Abwurfposition (2), zur optischen Zentrierposition
(4) oder zur Drehposition (5) transportiert.
Æ Die Z-Achse führt eine Vertikalbewegung aus. Jede Pinole, die sich in der untersten Stellung
des Sterns befindet (1), wird von dieser Achse angehoben oder abgesenkt. Damit werden die
Bauelemente von den Zuführmodulen abgeholt und auf die Leiterplatte abgesetzt. Die Z-
Achse ist eine so genannte „intelligente Achse“. Sie „merkt sich“ die Abholhöhe einer jeden
Zuführmodulspur und die Bestückhöhe für jedes Bauelement. So lässt sich der Bestückpro-
zess beschleunigen. Die programmierte Aufsetzkraft bleibt konstant.
Æ Die DP-Achse dreht das optisch zentrierte Bauelement in die gewünschte Bestücklage. Die
Bewegungs-abläufe der Rotations- und auch der Translationsachsen werden von Regelkrei-
sen gesteuert. Sensoren für Position und Geschwindigkeit übermitteln die Istwerte der Achs-
bewegung an die Achsansteuerung. Aus dem Vergleich der Soll- und Istwerte werden die
Kraft- und Geschwindigkeitsparameter für die Servoverstärker und somit die auszuführende
Achsbewegung ermittelt. Die Vakuumwerte an der Pipette werden während des gesamten
Abhol- und Bestückprozesses ständig elektronisch kontrolliert, um die Bestückfehlerrate
möglichst gering zu halten.