ECM-B3M-C20807SS1伺服电机-资料.pdf - 第21页
18 Motor Drive Connector & Cable Connector Only (No Cable) Power Cable Power Cable with Brake Encoder Cable (Incremental T ype) Encoder Cable (Absolute T ype) Power Connector Power Connector …
17
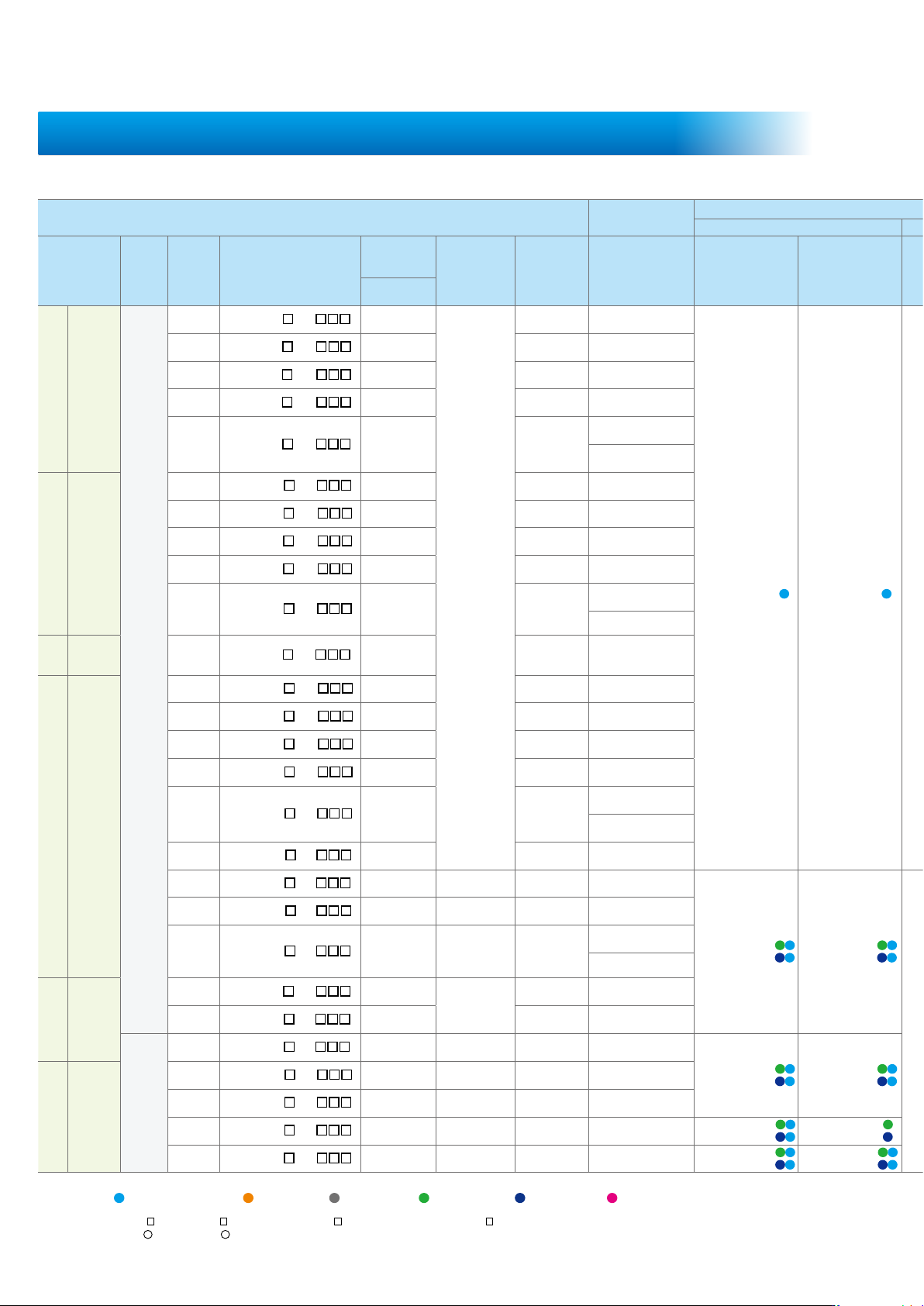
Servo System Combination Table
Motor
Drive
Connector & Cable Connector Only (No Cable)
Power Cable Power Cable with Brake Encoder Cable (Incremental Type) Encoder Cable (Absolute Type)
Power Connector
Power Connector
Encoder Connector
(x10
2
Standard Torsion-resistant Standard Torsion-resistant Standard Torsion-resistant
Low Inertia
Single- /
Three-
phase
100
2
0401
3
4
5
0.04 / 0.0426
W
W
W
W
W
W
W
W
W
W
D
+
M
W
200
2
0602
3
4
5
0.09 / 0.12 0.64 / 2.24
400
2
0604
3
4
5
400
2
3
4
5
1.27 / 4.44
2
3
4
5
High Inertia
100
2
0401
3
4
5
200
2
0602
3
4
5
0.64 / 2.24
400
2
0604
3
4
5
400
2
3
4
5
0.92 / 1.07 1.27 / 4.44
2
3
4
5
Low
Inertia
100
2
0401
3
4
5
Medium Inertia
200
2
0602
3
4
5
0.64 / 2.24
400
2
0604
3
4
5
400
2
3
4
5
2
3
4
5
1000
2
3
4
5
1000
2
1010
3
4
5
1000
2
3
4
5
7.79 / 7.94
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
D
+
S M W
M R W
2
3
4
5
2
3
4
5
High Inertia
2
3
4
5
12.44 / 12.62
2
3
4
5
Three-
phase
2
3
4
5
S W
R W
S W
R W
Medium Inertia
2000
2
1020
3
4
5
2000
2
3
4
5
2000
2
3
4
5
S W
R W
S
R
S W
R W
2
3
4
5
S W
R W
S W
R W
1. Model name with
W
D
M
S
R
B
2
3
4
5
1
2
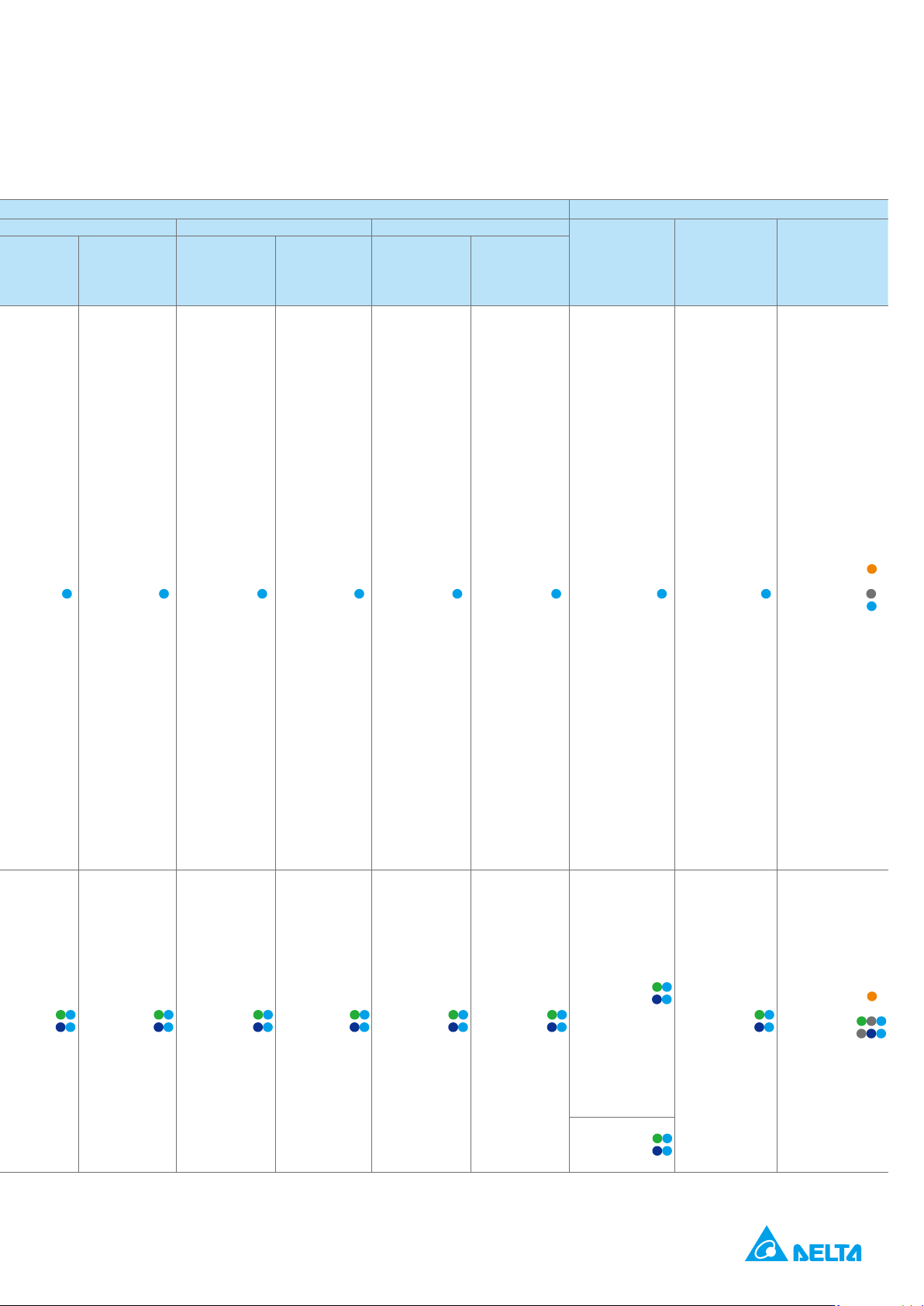
18
Motor
Drive
Connector & Cable Connector Only (No Cable)
Power Cable Power Cable with Brake Encoder Cable (Incremental Type) Encoder Cable (Absolute Type)
Power Connector
Power Connector
Encoder Connector
(x10
2
Standard Torsion-resistant Standard Torsion-resistant Standard Torsion-resistant
Low Inertia
Single- /
Three-
phase
100
2
0401
3
4
5
0.04 / 0.0426
W
W
W
W
W
W
W
W
W
W
D
+
M
W
200
2
0602
3
4
5
0.09 / 0.12 0.64 / 2.24
400
2
0604
3
4
5
400
2
3
4
5
1.27 / 4.44
2
3
4
5
High Inertia
100
2
0401
3
4
5
200
2
0602
3
4
5
0.64 / 2.24
400
2
0604
3
4
5
400
2
3
4
5
0.92 / 1.07 1.27 / 4.44
2
3
4
5
Low
Inertia
100
2
0401
3
4
5
Medium Inertia
200
2
0602
3
4
5
0.64 / 2.24
400
2
0604
3
4
5
400
2
3
4
5
2
3
4
5
1000
2
3
4
5
1000
2
1010
3
4
5
1000
2
3
4
5
7.79 / 7.94
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
D
+
S M W
M R W
2
3
4
5
2
3
4
5
High Inertia
2
3
4
5
12.44 / 12.62
2
3
4
5
Three-
phase
2
3
4
5
S W
R W
S W
R W
Medium Inertia
2000
2
1020
3
4
5
2000
2
3
4
5
2000
2
3
4
5
S W
R W
S
R
S W
R W
2
3
4
5
S W
R W
S W
R W
1. Model name with
W
D
M
S
R
B
2
3
4
5
1
2
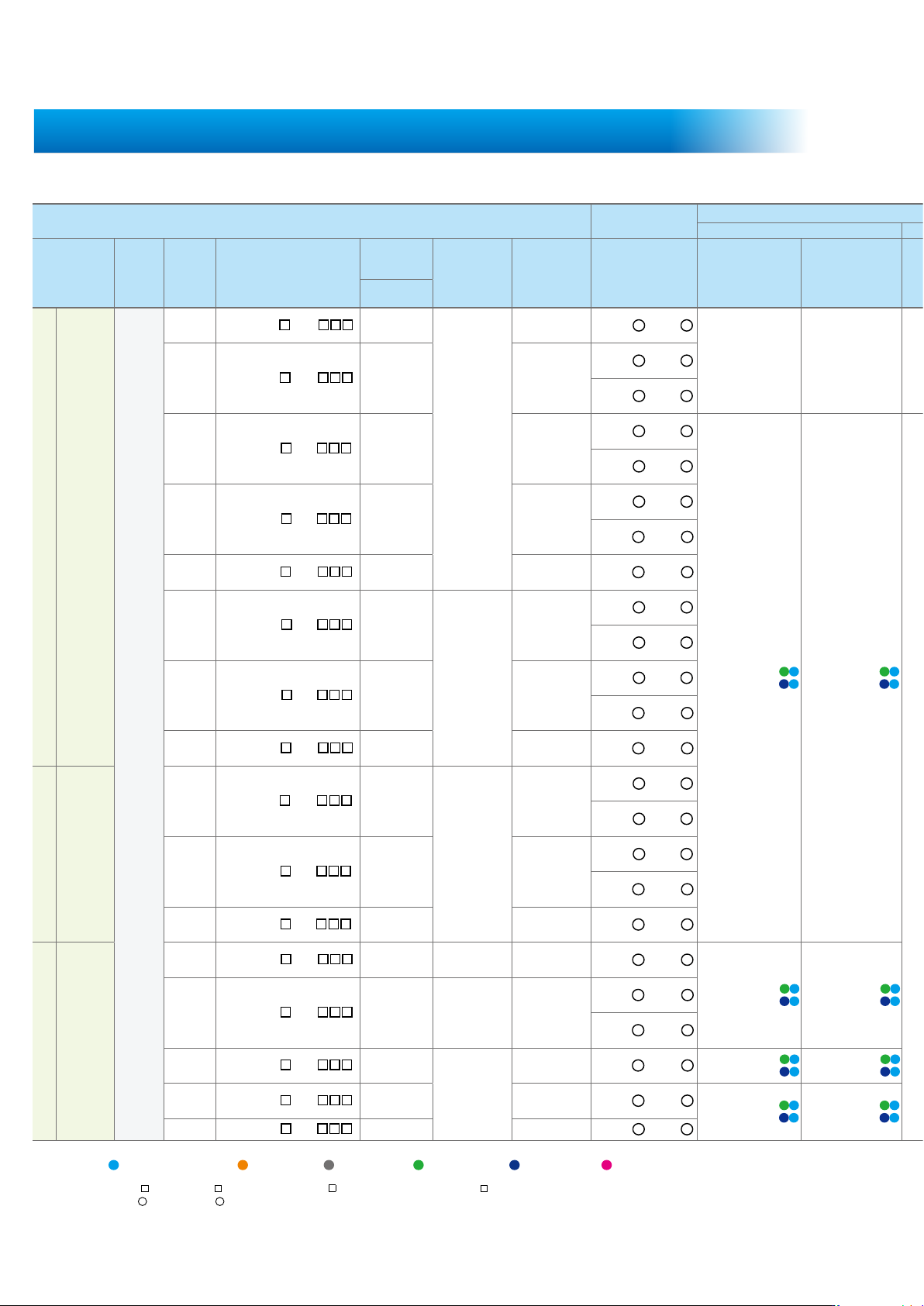
19
Motor
Drive
Connector & Cable Connector Only (No Cable)
Power Cable Power Cable with Brake Encoder Cable (Incremental Type) Encoder Cable (Absolute Type)
Power Connector
Power Connector
Encoder Connector
(x10
2
Standard Torsion-resistant Standard Torsion-resistant Standard Torsion-resistant
Medium Inertia
Three-
phase
400
2
0604
3
4
5
1
2
D
+
M
750
2
0807
3
4
5
1
2
1
2
1000
2
1010
3
4
5
1
2
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
S W
R W
D
+
S M W
M R W
1
2
1500
2
1015
3
4
5
1
2
1
2
2000
2
1020
3
4
5
1
2
1000
2
3
4
5
1
2
1
2
1500
2
3
4
5
1
2
1
2
2000
2
3
4
5
1
2
High Inertia
850
2
3
4
5
1
2
1
2
2
3
4
5
1
2
1
2
1800
2
3
4
5
1
2
Medium Inertia
2000
2
1820
3
4
5
1
2
S W
R W
S W
R W
S W
R W
2
3
4
5
1
2
1
2
4500
2
1845
3
4
5
1
2
S W
R W
S W
R W
5500
2
1855
3
4
5
1
2
S W
R W
S W
R W
S W
R W
7500
2
1875
3
4
5
1
2
1. Model name with
W
D
M
S
R
B
2
3
4
5
1
2
Servo System Combination Table
400V