ECM-B3M-C20807SS1伺服电机-资料.pdf - 第5页
2 Low Cogging T orque models which increases the smoothness of constant speed operation and low speed machining Motor Speed Time ! T rigger ST O •…
1
Optimized Performance
•
series to
•
Time
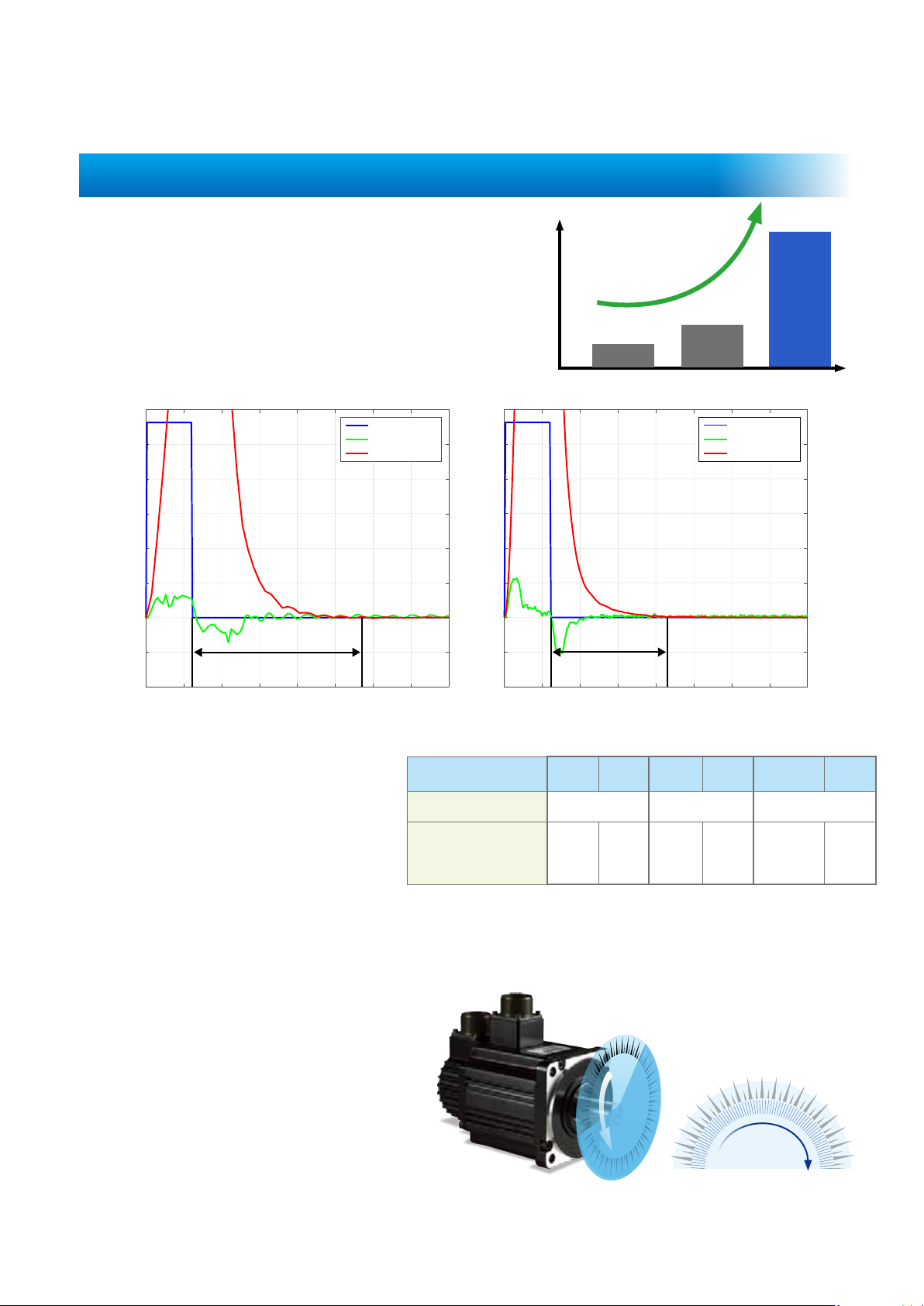
ASDA-B2 Performance
Speed Command
Current Command
Position Error
T Settling Time_ASDA-B2
Time
ASDA-B3 Performance
T Settling Time_ASDA-B3
Speed Command
Current Command
Position Error
Higher Load Tolerance
•
Enhances positioning precision and
•
Higher response bandwidth with the
same load conditions
Actual Load Inertia Ratio 50 times 70 times
Speed Loop
Bandwidth
in Position Mode
performance
•
Enhances positioning precision with
•
Stable operation at low speeds improves
machine performance
•
position when the power is off
46,603 pulses in one degree
0.5 kHz
1 kHz
3.1 kHz
2
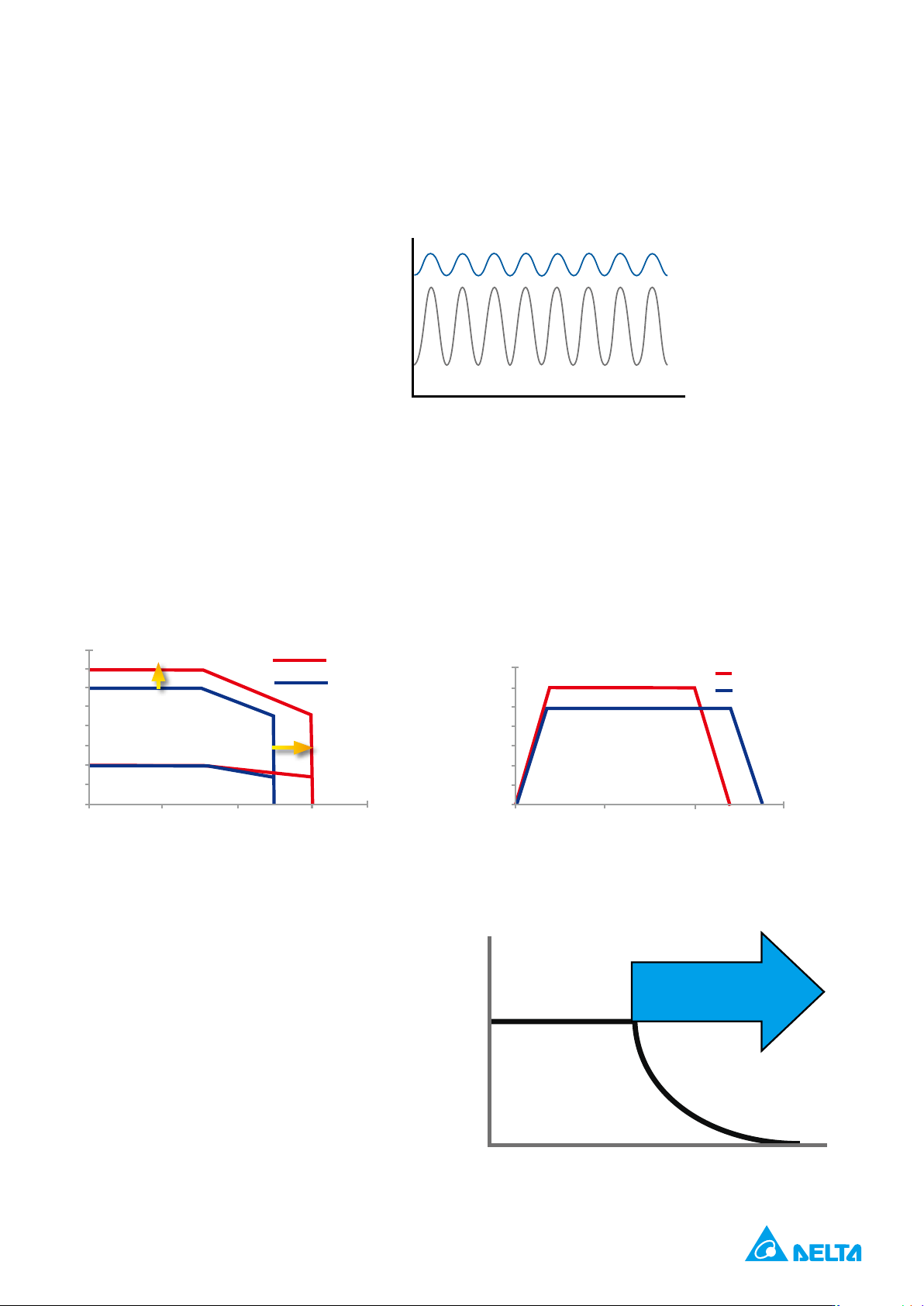
Low Cogging Torque
models which increases the smoothness
of constant speed operation and low
speed machining
Motor Speed
Time
!
Trigger STO
•
•
•
Torque
Time
ASDA-B3
Previous Models
Increased Speed and Torque
•
•
and deceleration is shortened
•
5000
0
Speed (rpm)
Time (sec)
4
2
1
0
Torque Ratio
Speed (rpm)
Intermittent Duty Zone
Continuous Duty Zone

3
High-Speed Capture Function
•
•
1187830
DI1
1187830 PUU
1187836 PUU
DI2
Data Array
1187836
Various Motion Functions
PR Mode
•
•
•
•