JM-50_OPE - 第38页
操作手册 2- 13 2-4-3- 5 基板传送 显示各种传感器 的状态,一边进行 基板搬入、基板搬出、释 放基板、个别控制、自动 调整基板宽度, 一边进行传送相 关的调整。 (1) 操作 ① 传送动作 选择传送动作。 可 选择 (基板) 搬入、 (基板)搬入 ( 第 2 次 ) 、 搬出( 基板) 、 释放基板、 重 夹。 ( (基板)搬 入 ( 第 2 次 ) 仅单通道传送 才能选择 ) 起动时选择「 基板搬入 」 。 ② 搬送 动…
操作手册
2-12
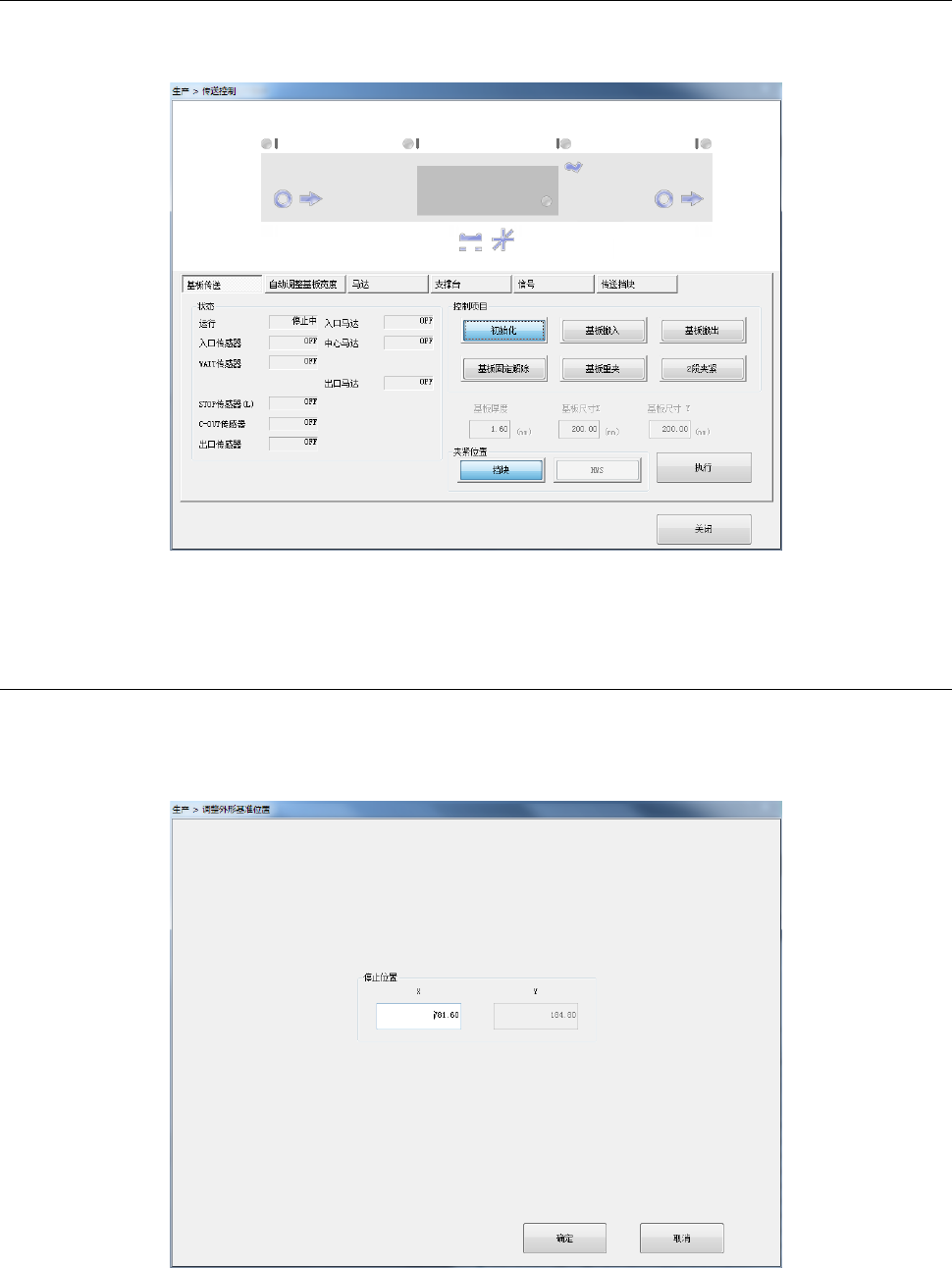
2-4-3-3 传送控制
在传送通道状态画面显示后,执行传送动作,进行马达、支撑台等有关控制。
详情内容请参见 JM-100 使用说明书「第 8 章 手动控制」的「8-4-1 传送控制」的各小项。
2-4-3-4 外形基准位置调整
要进行外形基准位置调整。
・外形基准位置调整
有关详细内容,请参照 JM-100 使用说明书「第 7 章 机器设置」的「7-3-3-3 调整外形基准位置」
的各小项。
操作手册
2-13
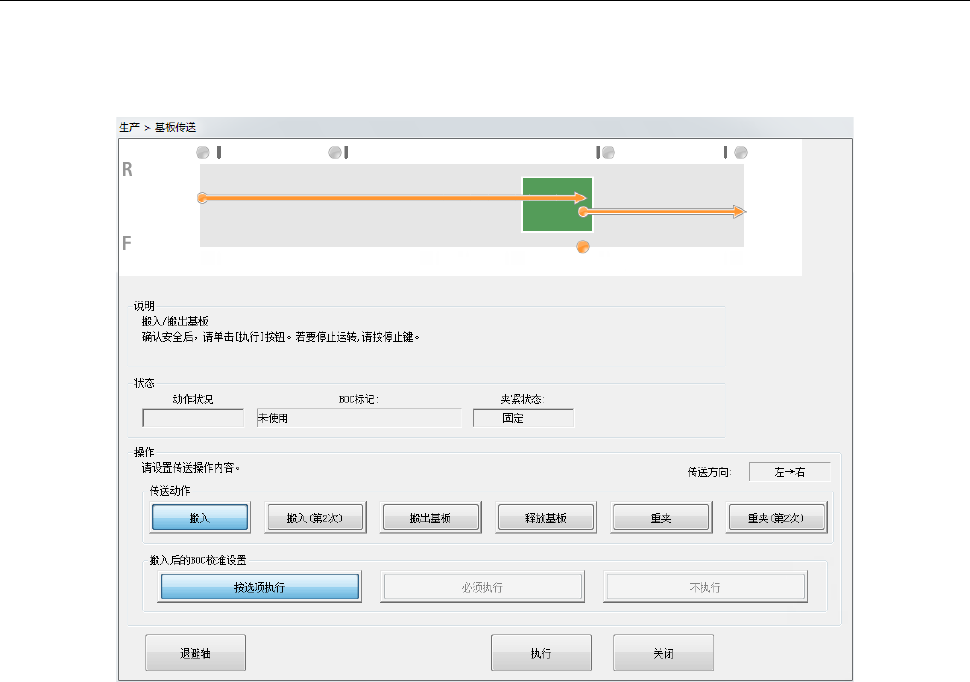
2-4-3-5 基板传送
显示各种传感器的状态,一边进行基板搬入、基板搬出、释放基板、个别控制、自动调整基板宽度,
一边进行传送相关的调整。
(1) 操作
① 传送动作
选择传送动作。可选择(基板)搬入、(基板)搬入(第 2 次)、搬出(基板)、释放基板、重
夹。
((基板)搬入(第 2 次)仅单通道传送才能选择)
起动时选择「基板搬入」。
② 搬送动作显示
根据指定的传送动作、动作站点,以图形显示传送状态的变化。
③ 搬入后的 BOC 校准设置
选择基板搬入是否立即实施 BOC 校准。
「按照操作选项」…根据操作选项的设置决定是否进行 BOC 标记识别。
「必须执行」…必须进行 BOC 标记识别。
「不执行」…不执行 BOC 标记识别。
④ 状态
显示执行传送动作中的信息。
显示传送方向、BOC 标记、固定状态的信息。
⑤ 轴退避
将轴进行退避。
⑥ 执行
按下执行按钮,执行[基板搬入]、[基板搬出]、[释放基板] 、[重夹]动作。
操作手册
2-14
⑦ 关闭
退出基板传送画面。
执行传送时,按<START>开关(或<执行>)。
结束操作时,按<关闭>。
传送过程中因为某种理由要取消动作时,可按<STOP>开关停止。
(2) 传送通道动作状态
① 基板搬入
将基板传入进行固定的缓冲区,进行固定
这时固定的位置,会根据设置的设定、基板的外形尺寸而变化。
如果在固定位置上已有基板时,则在传出后再进行传入。
② 基板搬入(第 2 次 )( 基板安装(2 阶段))
进行第 2 阶段的固定。
在固定使用 HMS。
③ 搬出基板
将基板从固定位置传出。
④ 释放基板
如果基板被固定,则解除固定。
⑤ 重夹
如果基板在固定位置上,则进行重夹动作,固定基板。
⑥ 重夹(2 阶段)
基当基片是在夹紧位置时,重夹固定使用 HMS 操作