Chapter4_3D Inspector_CHN - 第113页
程序员手册 | 113 “ Speed Up Mode ” (加速模式):相机实时屏幕关闭。(停用“ Cam era Vi e w ” [ 相机视图 ] 对话框)。 “ Pre Barcode ” (准备条码): PCB 等待加载边缘,直到识别出条码 为止。 “ No Pa s s Barcod e ” (不合格 条码):如果条码读取 失败,会显示错 误消息。 “ Pa d Bad …
112 | 第 4 章 3D Inspector
TM
版本 1.2
KOH YOUNG TECHNOLOGY INC.
(左下),“Right”(右)值影响“Right‐Top”(右上)。如果“Lef t”
(左)值增加,“Left‐Bottom”(左下)值就会变大。(如果“Right”
(右)值变大,“Right‐Top”(右上)值将会增加)。
“Use Z Axis Cali
bration”
(使用 Z 轴校准)
选中此选项可使用“KYCalibration”(KY 校准)执行新的 Z 轴校准。并且
会应用高级校准结果。
“Warning”(警告):更改此工具中的参数会对机器造成严重损坏。需要有 SPI 操作的高级技
能。
4.3.6. 设定
4.3.6.1. “Setup Main”(主要设置)对话框
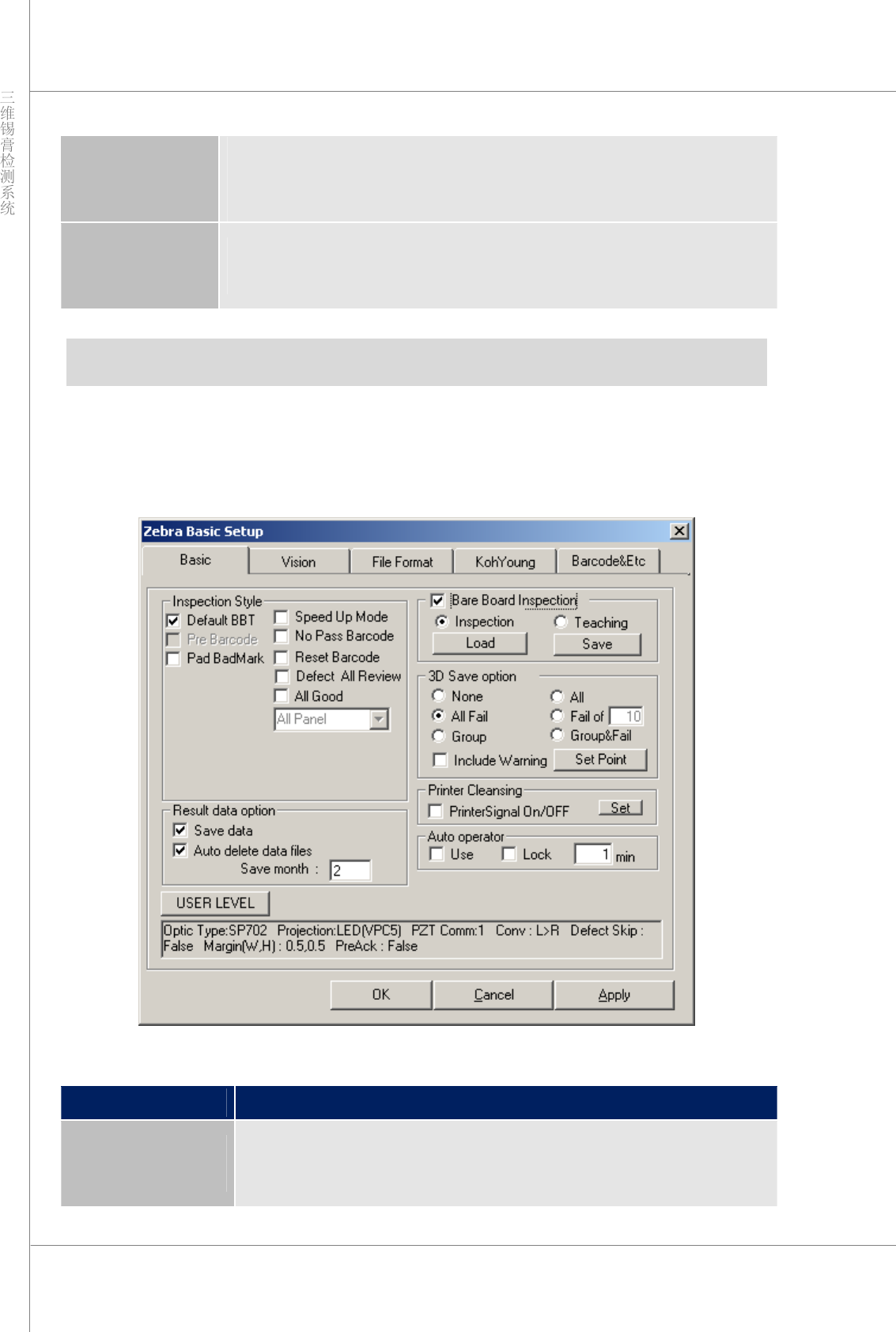
图 4‐20. “Setup Main”(主要设置)对话框
项目 说明
“Inspection Style”
(检测风格)
设置检测风格。
“Default BBT”(默认 BBT)(裸板识教):使用“Multi Vendor BBT”
(多个供应商 BBT)时,如果发生供应商识别错误,请使用基本 BBT。
程序员手册 | 113
“Speed Up Mode”(加速模式):相机实时屏幕关闭。(停用“Cam
era View” [相机视图]对话框)。
“Pre Barcode”(准备条码):PCB 等待加载边缘,直到识别出条码
为止。
“No Pass Barcod e”(不合格条码):如果条码读取失败,会显示错
误消息。
“Pad Bad Mark”(Pad 坏标记):指定是否使用 Pad 坏标记。
“Reset Barcode”(重新设置条码):如果单击“Reset”(重新设置)
按钮,将会删除条码信息。
“Defect All Review”(审查全部缺陷) 如果选中“Defect Viewer”
(缺陷查看器)上的所有错误,将不会激活“Pass”(合格)按钮。
“All Good”(全部良好):显示所有良好的结果。
“Result data option”
(结果数据选项)
“Save data”(保存数据):保存检测结果。如果未选中此复选框,则
不保存数据。
“Auto delete data file”(自动删除数据文件) 将自动删除所选期间
以外的数据。
“Bare Board Inspect
ion”(裸板检测)
设置是否使用裸板。
“3D Save”
(三维保存)选项
“None”(无) 不保存三维图像。
“All”(全部):保存所有 Pad 的三维图像。(硬盘存储器容量将很
快用尽。在这种情况下可能不会创建三维文件,因为数据是通过 FOV
保存的。)
“All Fail”(全部失败):保存关于所有缺陷的三维图像。
“Fail of ()”(() 个失败):最多保存指定数量的缺陷图像。
“Group”(组):保存指定为组的三维图像。
“Group&Fail”(组和失败):保存指定组和有缺陷的三维图像。
“Include Warning”(包含警告):保存具有警告结果的三维图像。
“Set Point”(设置点):设置在使用 SPC Pl us ™ 中的实时功能时是
否使用三维图像。
“Auto operator”
(自动操作员)
为了提高程序的安全性,以“Supervi s or”(主管)身份登录时,机器经过
在“Min”(分钟)中设置的值后将用户权限自动更改为“Operator”(操
作员)。
“Use”(使用):将用户权限自动更改为“Operator”(操作员)。
“Lock”(锁定):不将用户权限自动更改为“Operator”(操作
员)。
“USER LEVEL”
(用户级别)
设置用户级别。
114 | 第 4 章 3D Inspector
TM
版本 1.2
KOH YOUNG TECHNOLOGY INC.
4.3.6.2. “Setup”(设置)中的“Vision”(视觉)对话框
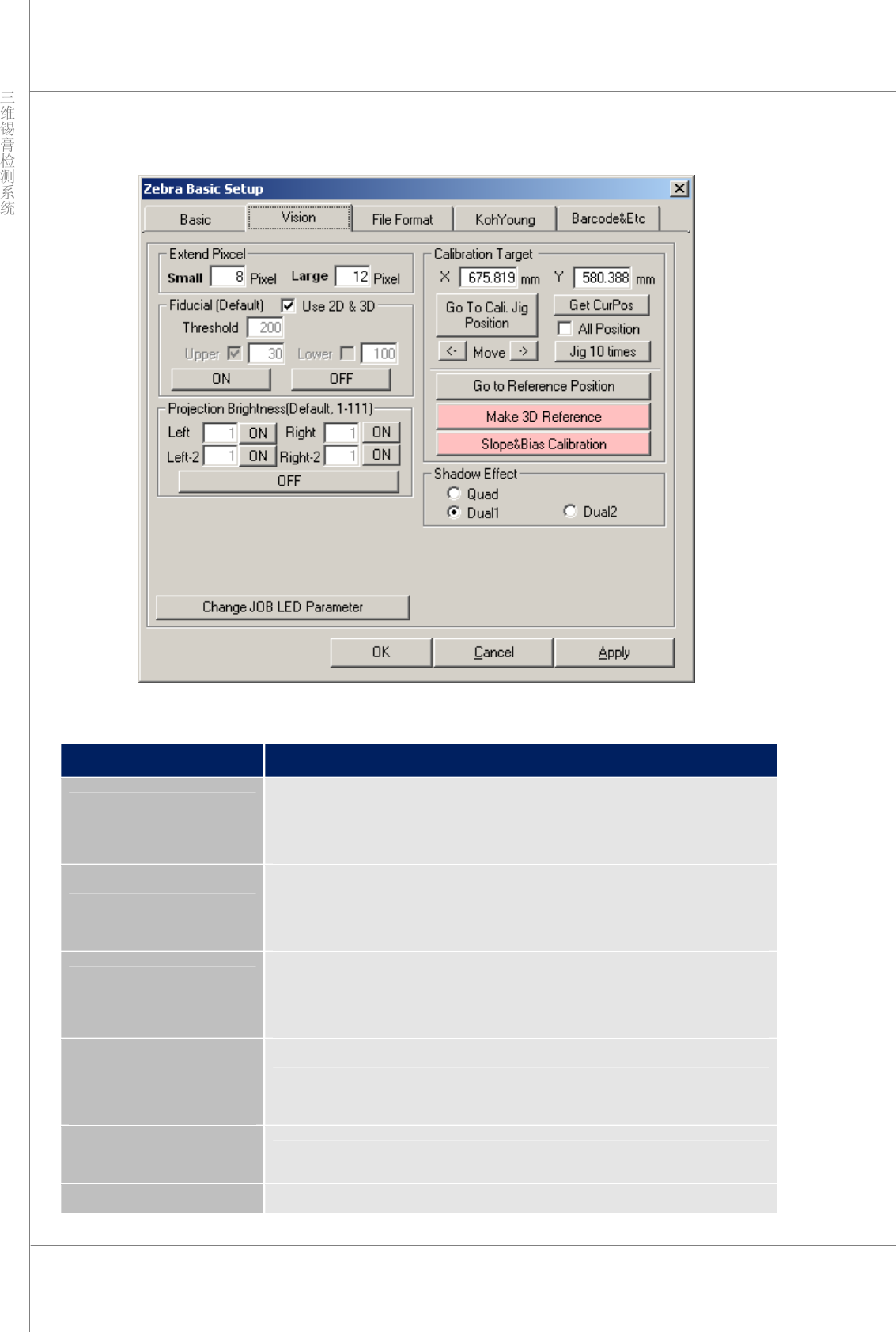
图 4‐21. “Setup”(设置)中的“Vision”(视觉)对话框
项目 说明
“Extend Pixel”
(扩展像素)
设置除 Pad 以外的检测区域。
它根据 Pad 是大于或小于 400um 分为“Small”(小)或“Large”
(大)两个选项。
基准点
设置基准点阈值和亮度。
“Use 2D& 3D”(使用二维和三维):使用二维光识别基准点失败
时,将使用三维光运行检测。
“Projection Brightness”
(投影亮度)
设置检测照明的亮度。会创建其他窗口。
“Dual 1”(双 2):调整“Left”(左)/“Right”(右)照明
“Dual 2”(双 2):调整“Le ft2 ”(左 2)/“Right2”(右 2)照明
“Change JOB LED Para
meter”
(更改 Job LED 参数)
启用 Job 文件上的亮度设置。
“Calibration Target”
(校准目标)
运行机器校准时使用。除了允许的人员外禁止使用。
“Shadow effect”
设置阴影效果。