00197682-04_UM_E-by-SIPLACE_PL.pdf - 第139页
Instrukcja eksploatacji E by SIPLACE 3 Dane techniczne i zespoły Od wersji oprogramowania SC 712.1 Wydanie 05/2019 3.6 Układ trans portowy płytek drukowanych 139 3.6 Układ transportowy płytek drukowanych 3.6.1 Opis Trans…
3 Dane techniczne i zespoły Instrukcja eksploatacji E by SIPLACE
3.5 Głowica montażowa Od wersji oprogramowania SC 712.1 Wydanie 05/2019
138
3.5.6.2 Dane techniczne
3
SIPLACE PP
ze stacjonarną
kamerą typu 36 GigE
(standard)
ze stacjonarną
kamerą typu 33 GigE
(Fine Pitch)
ze stacjonarną
kamerą typu 25 GigE
(Flip-Chip)
Gama podzespołów
*a
*)a Pamiętaj, że możliwa do montażu gama podzespołów zależy także od geometrii, specyficznych standardów
klienta, tolerancji opakowań podzespołów i tolerancji podzespołów.
0603 do SO, PLCC,
QFP, BGA, podzespoły
specjalne, Bare Die,
Flip-Chip
0402 do SO, PLCC,
QFP, BGA, podzespoły
specjalne, Bare Die,
Flip-Chip
0201 do SO, PLCC,
QFP, BGA, podze-
społy specjalne, Bare
Die, Flip-Chip
Specyfikacja podzespo-
łów
maks. wysokość
*b
min. raster nóżek
min. szerokość nóżek
min. raster kulek
min. średnica kulek
min. wymiary gabary-
towe
maks. wymiary gaba-
rytowe
maks. ciężar
*c
*)b 19 mm, kiedy zostanie usunięta pipeta z CP12 CP6. 8,5 mm, kiedy nie zostanie usunięta pipeta z CP12 CP6.
*)c Przy stosowaniu pipet standardowych.
19 mm
0,4 mm
0,24 mm
0,56 mm
0,32 mm
1,6mmx0,8mm
32 mmx32 mm
(jednorazowy pomiar)
45mmx98mm
100 g
19 mm
0,3mm
0,15mm
0,35mm
0,2 mm
1,0 mmx0,5 mm
55mmx45mm
(jednorazowy pomiar)
45mmx98mm
100 g
19 mm
0,25mm
0,1mm
0,14mm
0,08mm
0,6 mmx0,3 mm
16mmx16mm
(jednorazowy pomiar)
100 g
Programowalna siła osa-
dzania 1,0 N - 15 N 1,0 N - 15 N 1,0 N - 15 N
Typy pipet 5xx (standard)
4xx + adapter
8xx + adapter
9xx + adapter
5xx (standard)
4xx + adapter
8xx + adapter
9xx + adapter
5xx (standard)
4xx + adapter
8xx + adapter
9xx + adapter
Dokładność X/Y
*d
*)d Wartość dokładności została zmierzona według niezależnego od operatora standardu IPC.
± 50 µm/3σ ± 50 µm/3σ ± 37,5 µm/3σ
Dokładność kątowa ± 0,053°/3σ ± 0,053°/3σ ± 0,053°/3σ
Płaszczyzny oświetlenia 6 6 6
Możliwości ustawienia po-
ziomów oświetlenia
256
6
256
6
256
6
Instrukcja eksploatacji E by SIPLACE 3 Dane techniczne i zespoły
Od wersji oprogramowania SC 712.1 Wydanie 05/2019 3.6 Układ transportowy płytek drukowanych
139
3.6 Układ transportowy płytek drukowanych
3.6.1 Opis
Transportery POD są trójczłonowe: z transporterem załadowczym, transporterem obróbkowym i
transporterem odbiorczym. Obszary transportera załadowczego i odbiorczego służą jako strefy
buforowe dla płytek drukowanych, jeżeli mają być zachowane krótkie czasy oczekiwania. W ob-
szarze wprowadzania, obróbki i wydawania dostępne są czujniki sonarowe do rozpoznawania
płytek drukowanych.
Płytka obwodu drukowanego zatrzymywana jest w każdym obszarze (obszar obróbki oraz bufor)
przez mechaniczne stopery, które umieszczone są wzdłuż szyny transportowej. Szyna transpor-
towa może zostać obrócona o 180° i stosowana w odwrotnym kierunku przesuwu POD. Poprzez
obrót automatu o 180° i zmianę kierunku przesuwu POD uzyskiwana jest stała strona transpor-
towa po prawej lub lewej stronie.
Nr kat. 03108391-xx Stała szyna transportowa po prawej stronie E
Nr kat. 003110457-xx Stała szyna transportowa po lewej stronie E
Gdy płytka obwodu drukowanego osiągnie pozycję zadaną, przenośnik taśmowy zostaje zatrzy-
many, zaś płytka obwodu drukowanego zaciśnięta.
Szerokość transportera POD ustawiana i nadzorowana jest przez oprogramowanie stacji.
Wysokość transportowa może zostać wybrana na automacie, aby umożliwić integrację automa-
tów w liniach z wysokością transportową wynoszącą 900 do 930 lub 950 mm. Standardowa wy-
sokość wynosi 930 mm.
Komunikacja transporterów POD z poszczególnymi automatami następuje przez złącze SMEMA.
3 Dane techniczne i zespoły Instrukcja eksploatacji E by SIPLACE
3.6 Układ transportowy płytek drukowanych Od wersji oprogramowania SC 712.1 Wydanie 05/2019
140
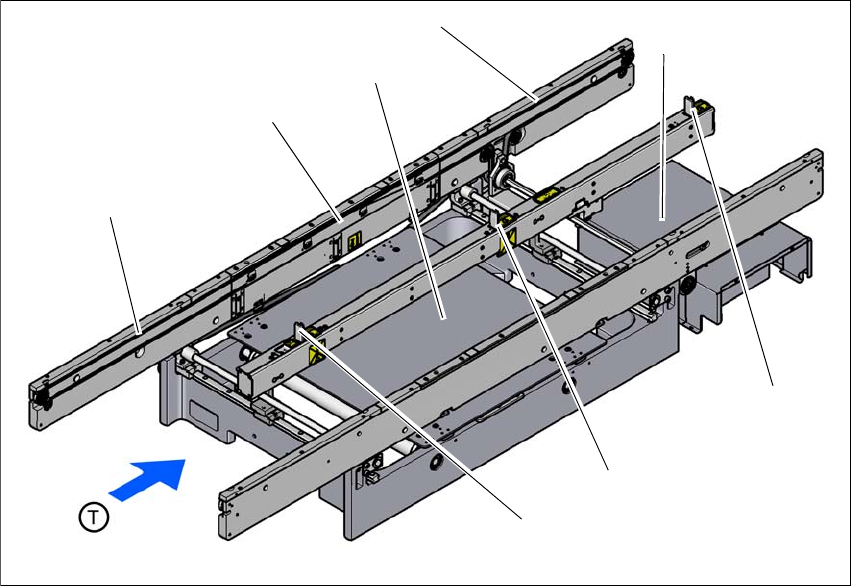
3.6.2 Budowa pojedynczego transportera płytek drukowanych
3
Rys. 3.6 - 1 Budowa pojedynczego transportera płytek drukowanych
(1) Transporter załadowczy
(2) Transporter obróbkowy
(3) Stół podnośny
(4) Transporter odbiorczy
(5) Układ sterowania transporterami (pod osłoną)
(6) Stoper wydawania
(7) Stoper obróbki
(8) Stoper wprowadzania
(1)
(3)
(4)
(2)
(5)
(7)
(8)
(6)