N7201A001C.pdf - 第142页
CM602-L 参考手册 2.4 机器调整 Pa ge 2-44 2.4.10 识别装置维修 可以确认全部识别处理 动作。 ∗ 关于操作方法,请参照 程序手册 “ 附录 1. 识别装置 (HGR-40)” 。 1. 在机器调整的菜单画面上按 [ 识别装置维 护 ] 。 • 识别装置维护的画面将 被显示。 2.4.11 环状负荷信息 显示环状负荷信息。 1. 在机器调整的菜单画面上按 [ 环状负荷信 息 ] 。 • 环状负荷信息的画面将 …
CM602-L
参考手册
2.4
机器调整
Page 2-43
2.4.9
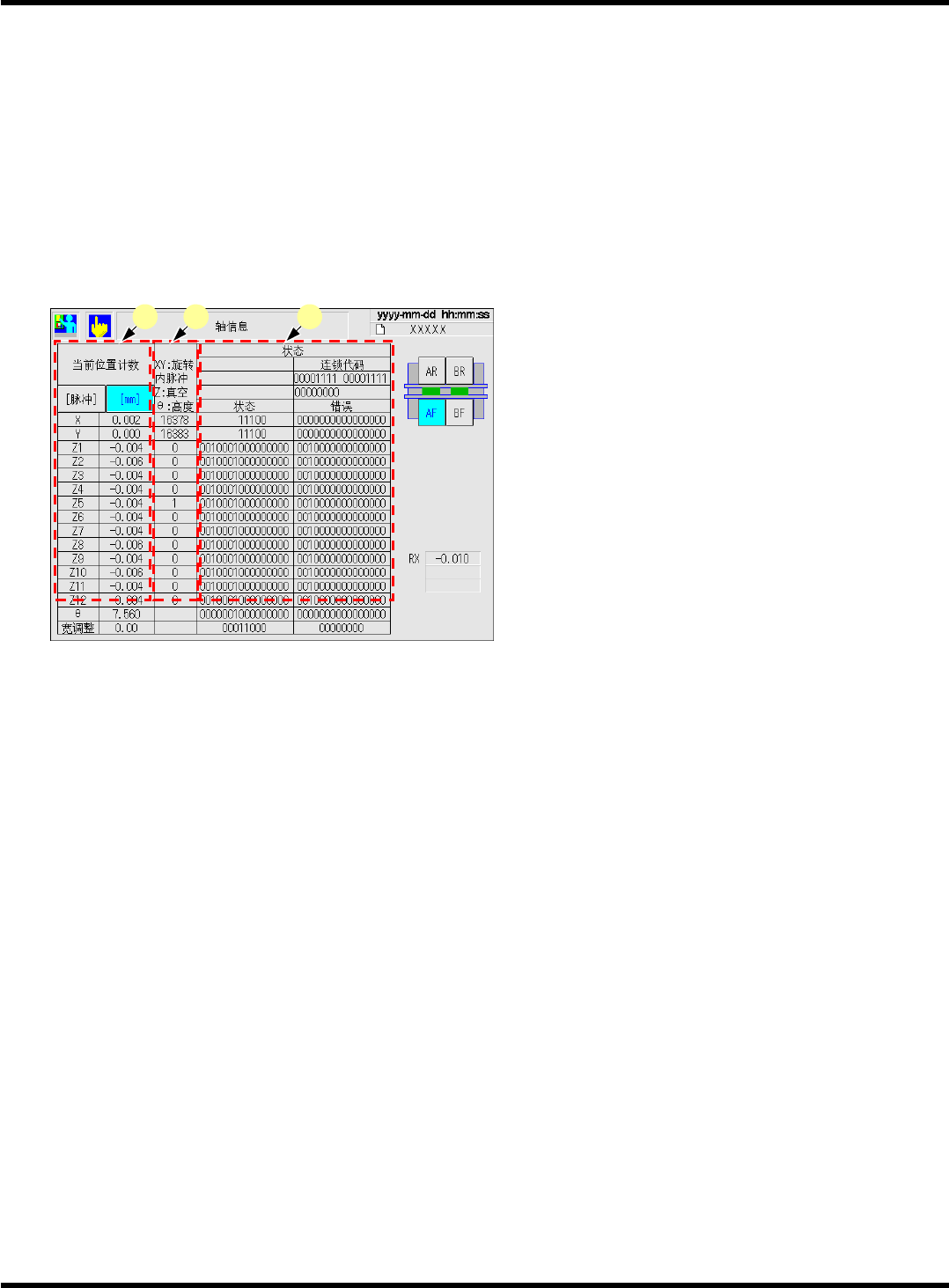
轴信息
可以确认本机控制的全轴的当前位置和状态。
∗
画面为高速吸头
(12
吸嘴
)
。
1.
在机器调整的菜单画面上按
[
轴信息
]
。
•
轴信息的画面将被显示。
•
画面项目内容如下所示。
a. [
当前位置计数器
]
用状态地址的
mm
或者脉冲显示各轴的当前位
置。
•
[
脉冲
]
用脉冲显示当前位置。
•
[mm]
用
mm
显示当前位置。
b. [XY:
旋转内脉冲
]
仅对
X
轴、
Y
轴的数据进行抽样显示。
•
[Z:
真空
]
以抽样方式显示
Z
轴的真空压力数据。
•
[
θ
:
高度
]
以抽样方式显示高度测量传感器的数据。
(
高度测量传感器为选购件。
)
c. [
状态
]
以比特显示各轴的错误、状态地址的状态。
在画面上使用的简字说明
X : XY
装置的
X
轴
Y : XY
装置的
Y
轴
Z1 ~ Z12 : Z
轴
(
高速吸头
(12
吸嘴
)
时
)
Z1 ~ Z8
为通用吸头
(8
吸嘴
)
时
Z1 ~ Z3
为多功能吸头时
θ
:
θ
轴
EJM8A-C-RMC02-A02-00
EJM4A-Ma-0022
a b c
CM602-L
参考手册
2.4
机器调整
Page 2-44
2.4.10
识别装置维修
可以确认全部识别处理动作。
∗
关于操作方法,请参照
程序手册
“
附录
1.
识别装置
(HGR-40)”
。
1.
在机器调整的菜单画面上按
[
识别装置维
护
]
。
•
识别装置维护的画面将被显示。
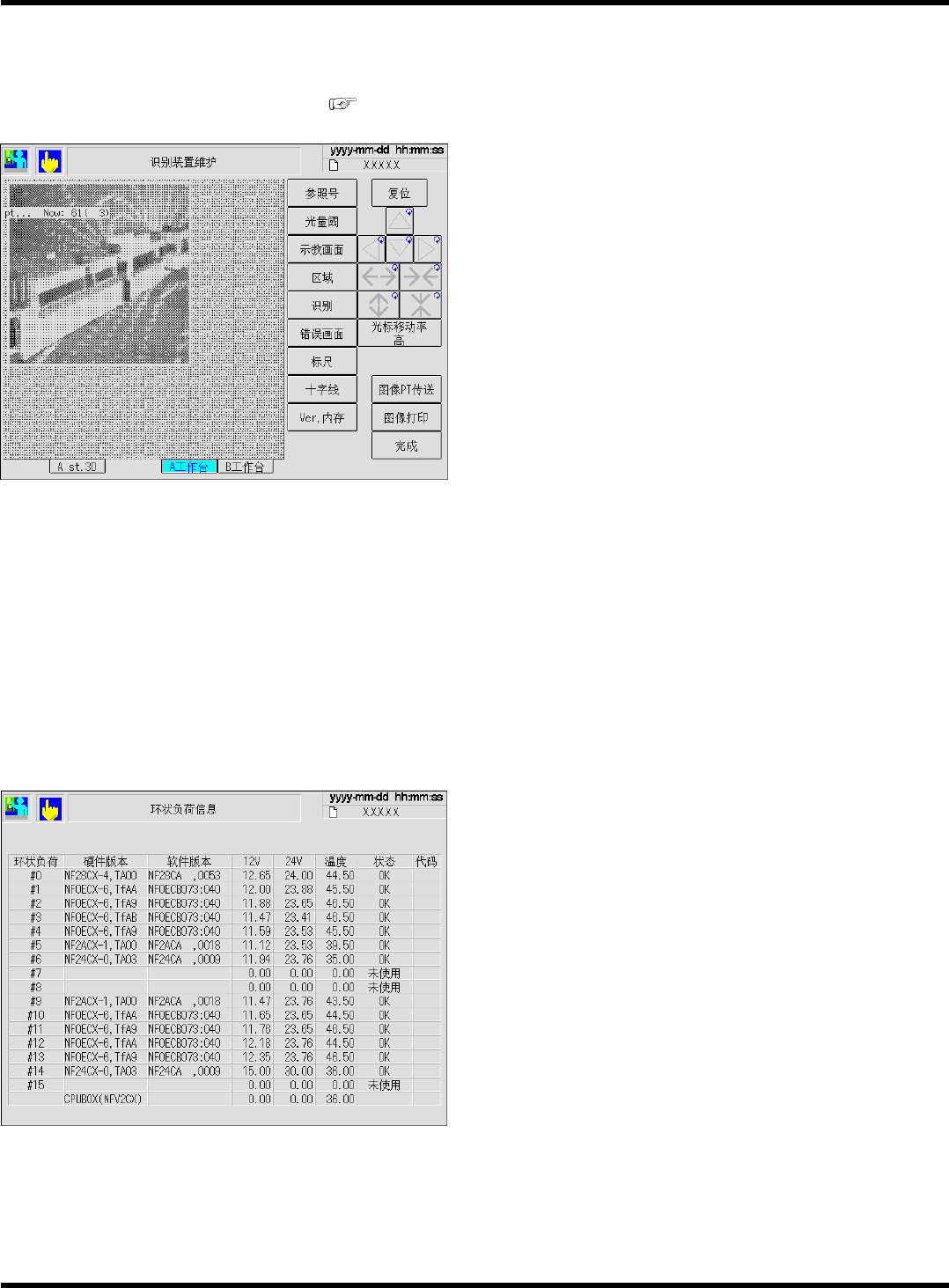
2.4.11
环状负荷信息
显示环状负荷信息。
1.
在机器调整的菜单画面上按
[
环状负荷信
息
]
。
•
环状负荷信息的画面将被显示。
•
画面项目内容如下所示。
各环状板对应于以下各处。
#1, #2 ......... A
工作台前
#3, #4 ......... A
工作台后
#5 ............... A
工作台搬送
#6 ............... A
工作台托盘
#9 ............... B
工作台搬送
#10, #11 ..... B
工作台前
#12, #13 ..... B
工作台后
#14 ............. B
工作台托盘
EJM8A-Ma-0008
EJM8A-C-RMC02-A02-00
EJM8A-Ma-0007
CM602-L
参考手册
2.4
机器调整
Page 2-45
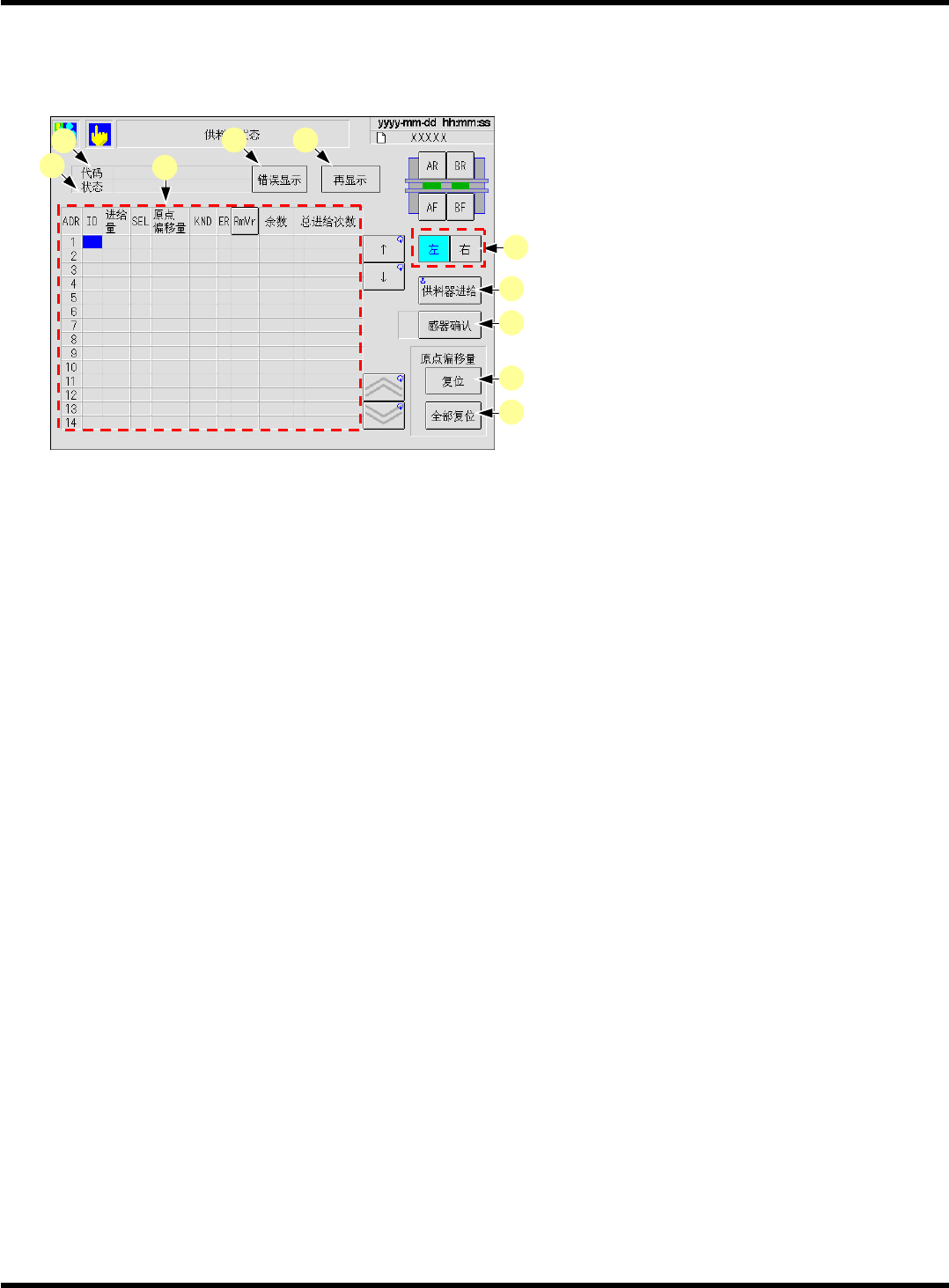
2.4.12
供料器状态
显示当前设置在本机上的供料器信息。
1.
在机器调整的菜单画面上按
[
供料器状
态
]
。
•
供料器状态的画面将被显示。
•
画面项目内容如下所示。
a. ‘
代码
’
•
显示错误代码。
b. ‘
状态
’
•
显示错误的内容。
c. [
错误显示
]
•
显示以光标选择的供料器的错误内容。
d. [
再显示
]
•
再次显示供料器信息。
e.
用虚线框住的部分
‘ADR’
显示供料器被设置的地址。
‘ID’
显示被设置的供料器的
ID
号码。
‘
进给量
’
显示供料器的进给量。
‘SEL’
显示使用双轨编带供料器时被选择的是左右之
中的哪一个轨道。
‘
原点偏移量
’
显示供料器的原点偏移量。
‘KND’
显示供料器的种类。
‘ER’
显示发生错误时的错误代码。
[RmVr]
每按一次,可以按照
[RmVr]
→
[BdVr]
的顺序变
更。
RmVr:
显示供料器的系统
ROM
版本。
BdVr:
显示供料器的基板版本。
‘
余数
’
显示芯片的余数。
‘
总进给次数
’
显示供料器的总进给次数。
下一页
EJM8A-C-RMC02-A02-00
EJM8A-Ma-0009
a
b
c d
e
f
g
h
j
k