RX-7_InstructionManual_Rev03_C.pdf - 第308页
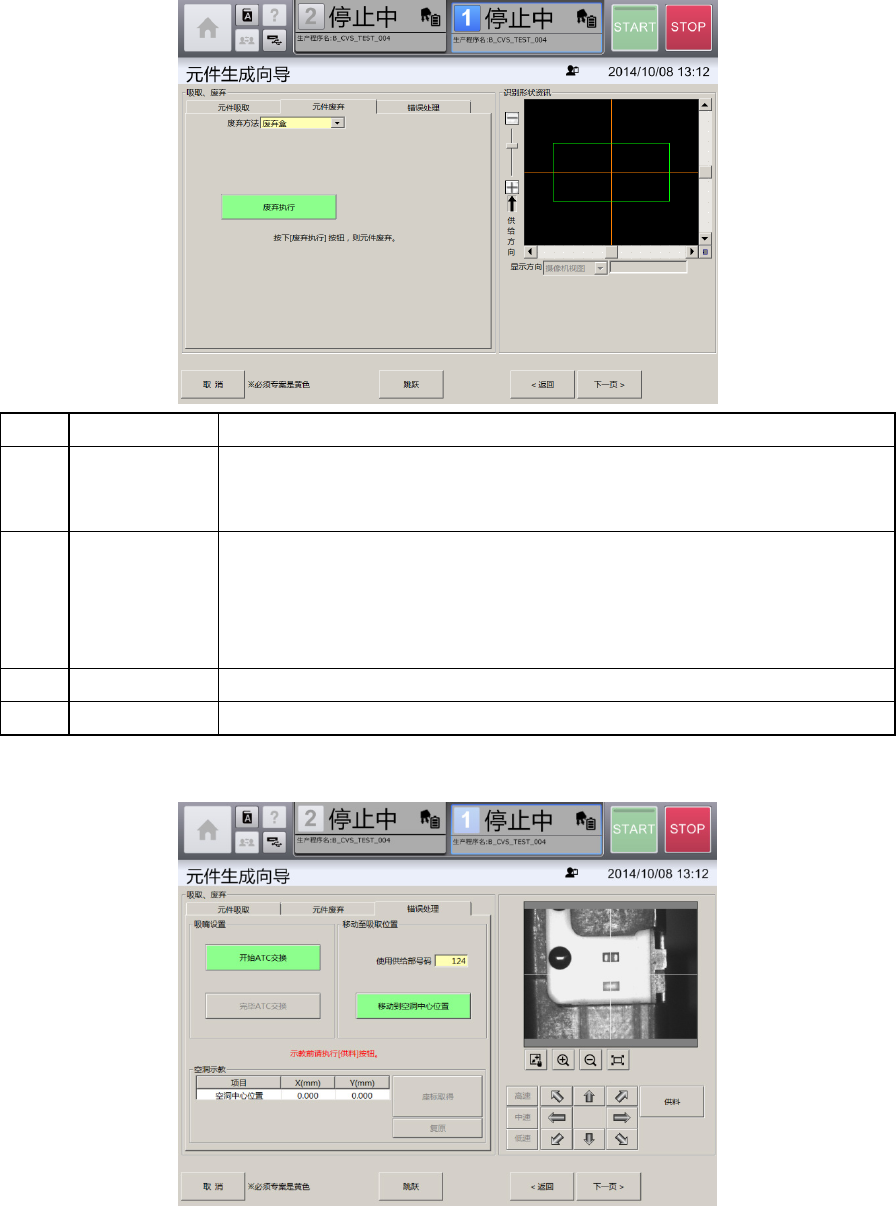
第 4 章 操作篇 4- 13. 元件生成向导 230 选择 [ 元件废弃 ] 选项卡 记号 名称 说明 (a) 废弃方法 通过下拉列表选 择元件的废弃 方法。 • 废 弃盒:自动将 元件废弃到废弃盒。 • 手动废弃:手动 从吸嘴将元件 取下。 (b) 废弃执行 废弃吸取的元件 。 在 [ 废弃方法 ] 中选择了 [ 废弃盒 ] 时, 自动废弃到废弃盒。 在 [ 废弃方法 ] 中选择了 [ 手动 废弃 ] 时,贴片头会移 动到近前,…
第
4
章
操作篇
4-13.
元件生成向导
229
4
记号
名称
说明
(a)
吸取方法
通过下拉列表选择元件的吸取方法。
• 自动吸取:使用共通面板中选择的单元,从指定的供给部编号的
供料器自动进行元件吸取。
• 手动吸取:使用共通面板中选择的单元,手动使元件被吸取到吸
嘴上。
(b)
吸嘴号
选择吸取中使用的吸嘴号。
(c)
吸嘴
ID
选择吸取中使用的吸嘴
ID
。
使用过的吸嘴
ID
也会作为元件数据注册。
(d)
使用供给部号码
输入自动吸取元件时的供给位置编号。
(e)
自动吸取用
输入在本画面中的自动吸取动作时使用的超驰信息。
仅在本画面中的自动吸取动作中使用,不会注册到元件数据中。
• 超驰 XY(%):以(%)指定 X 轴及 Y 轴的移动速度(超驰)。
• 超驰(C)(%):以(%)指定供料器的送料速度。
• 吸嘴停留时间(吸取时)(msec):输入元件吸取时的吸嘴停留时间。
(f)
执行吸取
使用
[
吸取方法
]
中选择的方法,进行元件的吸取。
(g)
移动至元件识别
位置
使元件移动到元件识别中使用的摄像机的识别位置。
(h)
元件高度资讯
测量元件的高度,显示测量结果,以及反映到元件数据。
• 元件高度测定:测量吸取元件的高度,在[测定结果]中显示。
• 测定结果:显示元件高度的测定结果。
• 映现:将测定结果反映到元件数据的元件高度中。
• 元件高度(mm):输入元件数据的元件高度。
• 元件高度容许率(%):以(%)输入吸取检查识别时元件高度的容许
率。
第
4
章
操作篇
4-13.
元件生成向导
230
选择
[
元件废弃
]
选项卡
记号
名称
说明
(a)
废弃方法
通过下拉列表选择元件的废弃方法。
• 废弃盒:自动将元件废弃到废弃盒。
•
手动废弃:手动从吸嘴将元件取下。
(b)
废弃执行
废弃吸取的元件。
在[废弃方法]中选择了[废弃盒]时,自动废弃到废弃盒。
在[废弃方法]中选择了[手动废弃]时,贴片头会移动到近前,元件一次性更
换台车会下降,门的锁定将解除。手动从吸嘴取下元件后,触摸[废弃完成]
按钮,手动废弃即完成。
(c)
废弃完成
完成手动废弃的作业。
(d)
废弃取消
在手动废弃的作业过程中取消。
选择
[
错误处理
]
选项卡
第
4
章
操作篇
4-13.
元件生成向导
231
4
记号
名称
说明
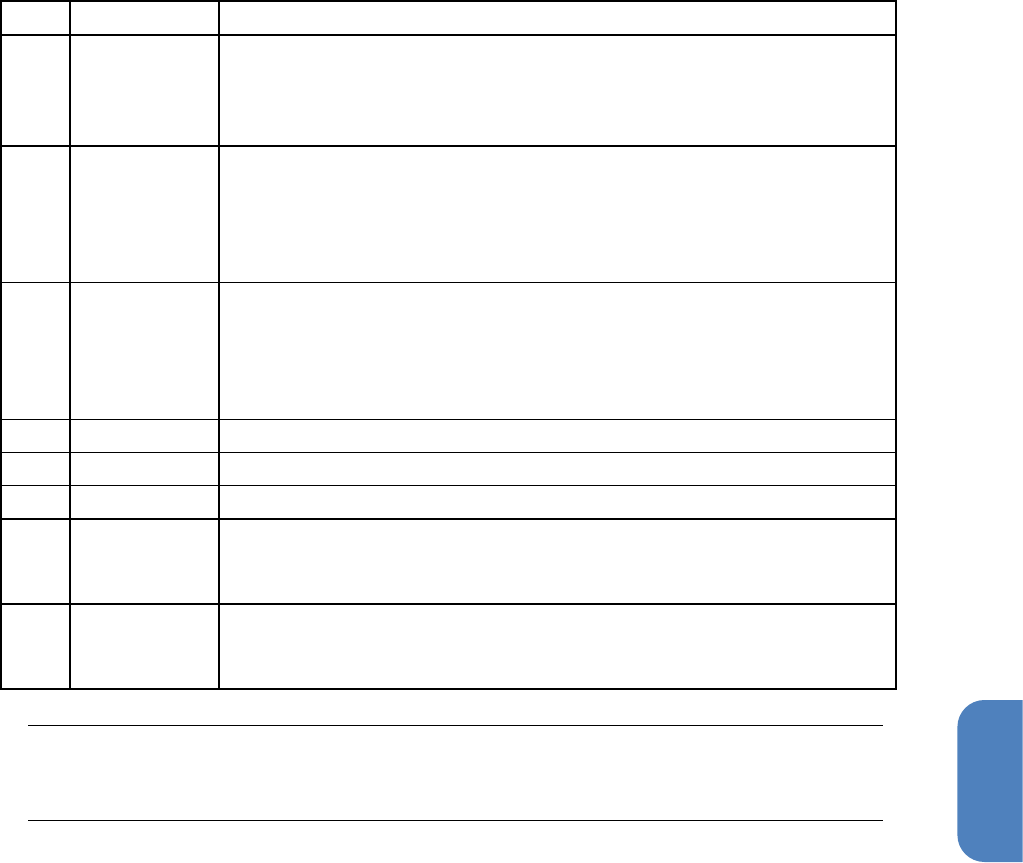
(a)
吸嘴设置
如果元件吸取时
ATC
上没有必要的吸嘴,需要补充进行
ATC
交换所必要
的吸嘴。
• ATC 交换开始:开始 ATC 的交换。
•
ATC
交换完成:完成
ATC
的交换。
(b)
移动到空洞中
心位置
自动吸取无法正确进行时,要进行手动空洞示教。
基本操作方法,请参见「4-15-2. 吸取位置调整」的「手动空洞示教」。
• 使用供给部号码:输入空洞示教时使用的元件供给部号码。
• 移动到空洞中心位置:将 OCC 移动到空洞中心位置,显示摄像机图
像。
(c)
空洞示教
执行手动空洞示教以及显示结果。
• 空洞中心位置:显示当前的空洞中心位置(示教结果)。
• 取得坐标:取得摄像机图像光标的中心位置坐标,反映到[空洞中心
位置]。
•
复原:将空洞中心位置恢复为执行
[
取得坐标
]
按钮前的状态。
(d)
摄像机图像
显示操作对象单元贴片头的摄像机图像。
(e)
移动速度
从
[
低速
]
、
[
中速
]
、
[
高速
]
中选择
XY
轴的移动速度。
(f)
微调移动
触摸此按钮,可切换微调移动模式与十字标记移动模式。
(g)
移动按钮
移动摄像机图像上的十字标记。
微调移动模式可使对象单元贴片头的 XY 轴(摄像机图像的显示中心位
置)微调移动。
(h)
送料
控制从带式供料器传送元件,使正确的空洞位置显示到[摄像机图像]
中。
对象的供给位置,即使进行一次送料操作,[坐标取得]也会变为有效。
注意
• 元件吸取过程中,无法选择[错误处理]选项卡。请在[元件废弃]选项卡中进行元件的废弃。
• 在[错误处理]选项卡中无法切换对象单元。请在[元件吸取]选项卡中切换单元。