RX-7_InstructionManual_Rev03_C.pdf - 第315页
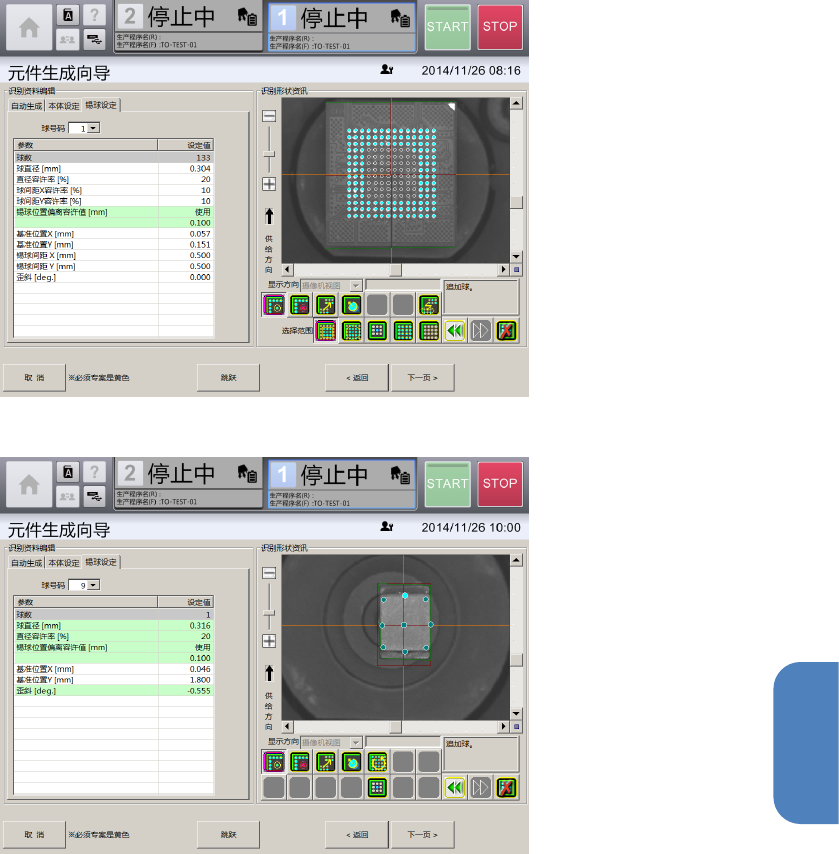
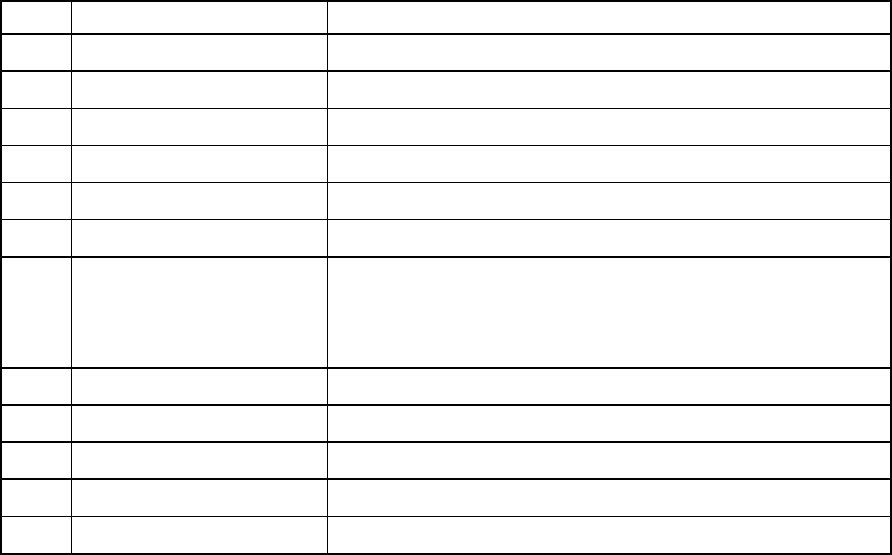
第 4 章 操作篇 4- 13. 元件生成向导 237 4 选择 [ 锡球设定 ] 选项卡( BGA 元件 ) 选择 [ 锡球设定 ] 选项卡( 异形元件 ( 有球 ))
第
4
章
操作篇
4-13.
元件生成向导
236
选择
[
脚设定
]
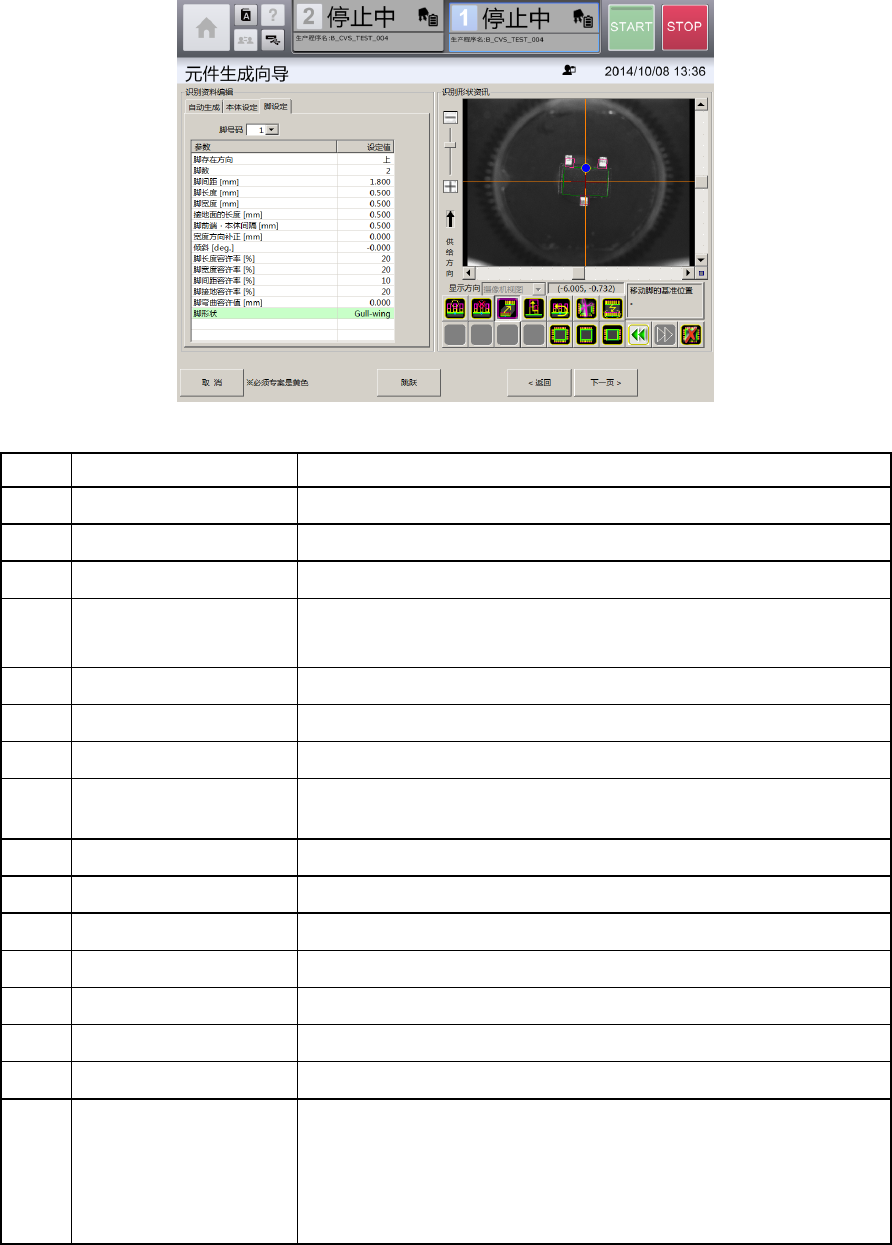
选项卡(脚元件
/
异形元件(有脚))
记号
名称
说明
(a)
脚号码
选择要变更参数的引脚参数号码。
(b)
脚存在方向
按照各脚号码选择元件各边有无脚。
(c)
脚数
对于
[
脚存在方向
]
中选择的
1
条边,输入实际存在的脚的个数。
(d)
脚间距
(mm)
输入脚的中心间距离。
[脚数]为 1 个时,显示为 0.000 (mm)。
(e)
脚长度
(mm)
输入脚的长度。
(f)
脚宽度
(mm)
输入脚的宽度。
(g)
接地面的长度
(mm)
输入脚与基板接地面的长度。
(h)
脚前端・本体间隔
(mm)
输入从脚的前端至本体的间隔。
(i)
宽度方向补正
(mm)
输入脚的分组中心从元件的中心的补正量。
(j)
歪斜
(deg
.
)
输入脚的分组中心从元件的中心倾斜程度的歪斜角度。
(k)
脚长度容许率
(%)
输入相对于脚长度的识别容许率。
(l)
脚宽度容许率
(%)
输入相对于脚宽度的识别容许率。
(m)
脚间距容许率
(%)
输入相对于脚间距的识别容许率。
(n)
脚接地面容许率
(%)
输入相对于脚的设置面长度的识别容许率。
(o)
脚弯曲容许值
(mm)
以长度
(mm)
输入脚前端部的弯曲容许值。
(p)
脚形状
选择脚形状。
• Gull-wing:Gull-wing 形的脚
• J-lead:J-lead 形的脚
第
4
章
操作篇
4-13.
元件生成向导
237
4
选择
[
锡球设定
]
选项卡(
BGA
元件)
选择
[
锡球设定
]
选项卡(异形元件(有球))
第
4
章
操作篇
4-13.
元件生成向导
238
记号
名称
说明
(a)
球号码
选择要变更参数的球参数的编号。
(b)
球数
显示球参数内的锡球(电极)的个数。
(c)
球直径
(mm)
在
0.001 mm
~
99.999 mm
的范围内输入球直径。
(d)
直径容许率
(%)
在
1%
~
99%
的范围内输入球直径的容许率。
(e)
球间距
X
容许率
(%)
在
1%
~
99%
的范围内输入
X
方向的球间距的容许值。
(f)
球间距
Y
容许率
(%)
在
1%
~
99%
的范围内输入
Y
方向的球间距的容许值。
(g)
锡球位置偏离容许值
(mm)
选择是否使用识别锡球时的位置偏离容许值
• 使用
• 不使用
选择
[
使用
]
时,以距离
(mm)
输入锡球位置偏离容许值。
(h)
基准位置
X (mm)
输入球参数的分组基准位置
X
。
(i)
基准位置
Y (mm)
输入球参数的分组基准位置
Y
。
(j)
锡球间距
X (mm)
以
0.001 mm
~
99.999 mm
的范围输入相邻的球间隔
X
。
(k)
锡球间距
Y (mm)
以
0.001 mm
~
99.999 mm
的范围输入相邻的球间隔
Y
。
(l)
歪斜
(deg)
输入球参数分组的歪斜。