RX-7_InstructionManual_Rev03_C.pdf - 第528页
第 6 章 附录 6- 4. 词汇表 12 生产分组 系指以相同的供 给部配置,吸 嘴个数(配置)进行 生产,对多个机种进 行批量优化 的多 个生产程序 的集合。 生产分组名称 对生产组的命名 。 生产文件 该文件中记录了 机器中保存的 生产程序。 生产 文件名 生产 文件的保存名称。 生产程序 系指 记录了生产特定基板所需 的贴片信息的 数据,包括需要的 贴片 元件,该 元件 的贴片位置 ,吸嘴 对应的 吸取 顺序…
第
6
章
附录
6-4.
词汇表
11
6
吸取检查摄像机
吸取元件时,为了检查吸取状态,从元件侧面进行识别,检查元件高度的摄像机。可检查芯片站
立。采用透射照明。
吸取停留时间
系指为切实地进行吸取动作,在吸取位置(下降位置)停留的时间。
原点补正值
系指原点回复动作完成时停止的位置。这个值意味着相对于各轴所在装置自身的原点所出现的原点
补正值的移位。
装置自身的原点位置会因装置的调整/修理而移动,即使同一机种的装置也可能不同。装置自身的原
点和程序上假定的原点之差,即为原点补正值。
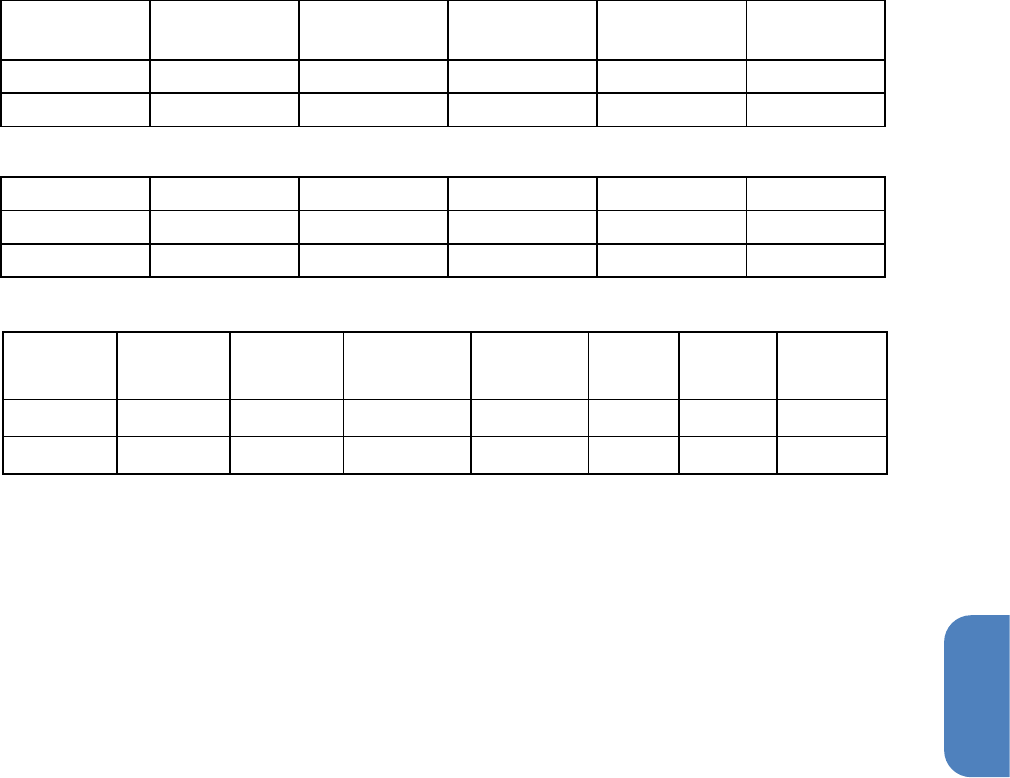
照明模式
照明的亮度级别。每个相机以
5
位或
7
位数字显示。
OCC
(
5
位)
点灯时间
蓝色
同轴照明
蓝色
斜照明
红色
同轴照明
红色
斜照明
始终亮灯
0
0
~
4
0
~
4
0
~
4
0
~
4
闪烁
1
0
~
8
0
~
8
0
~
8
0
~
8
元件摄像机,反射照明(
5
位)
点灯时间
未使用
同轴照明
斜照明
未使用
始终亮灯
0
0
0
~
4
0
~
4
0
闪烁
1
0
0
~
8
0
~
8
0
VCS
、反射照明(
7
位)
点灯
时间
同轴
照明
下段
照明
中段
照明 2
中段
照明 1
上段
照明 2
上段
照明 1
始终亮灯
0
0
~
4
0
~
4
0
~
4
0
~
4
0
~
4
0
~
4
闪烁
1
0
~
8
0
~
8
0
~
8
0
~
8
0
~
8
0
~
8
照明的亮度级别为始终亮灯时,可在
0
~
4
的范围内设定,闪烁时可在
0
~
8
的范围内设定。无论哪
种情况,均为数值越大越亮,始终亮灯中的
4
和闪烁中的
8
亮度相同。
真空切换阀门
运行真空/吹风用阀门装置,连接吸嘴和真空/吹气源,进行元件的吸取/贴片。真空用于吸取元
件,吹气源用于将元件贴片到基板上。
控制权
除了操作装置中的主操作面板外,本机还有可选的主机系统
(IS Lite)
。一般情况下操作面板拥有控制
权。要通过主机系统开始操作时,首先应通过主机系统获得控制权,结束操作时,应将控制权返回
至操作面板。
第
6
章
附录
6-4.
词汇表
12
生产分组
系指以相同的供给部配置,吸嘴个数(配置)进行生产,对多个机种进行批量优化的多个生产程序
的集合。
生产分组名称
对生产组的命名。
生产文件
该文件中记录了机器中保存的生产程序。
生产文件名
生产文件的保存名称。
生产程序
系指记录了生产特定基板所需的贴片信息的数据,包括需要的贴片元件,该元件的贴片位置,吸嘴
对应的吸取顺序,贴片顺序,供给位置及其他基板数据。
生产程序根据要生产的基板程序创建,切换生产程序时,要指定生产文件。
生产程序名称(在
IS-Lite
中记述为基板
ID
)
生产程序的名称。
装置推入量
系指元件贴片时,为了将元件切实贴片到基板上,按设定值降下吸嘴,从基板贴片的高度进一步把
元件嵌入的移动量。
贴片步骤数据
输入生产时各个贴片步骤的信息。通过示教进行补正。一个步骤信息包括贴片于基板上某个位置的
元件名称及其供给部的位置,基板上的贴片位置,元件方向,使用的吸嘴,贴片顺序等。
贴片头
贴片头由视觉识别摄像机部和超小型行星贴片头构成。
贴片停留时间
系指为切实地进行贴片动作,在贴片位置(下降位置)停留的时间。
识别重试次数
设定发生元件识别错误时重新识别的次数。重复了指定次数后仍发生识别错误时,将废弃该元件,
开始吸取下一个元件的动作。设定范围为
0
~
9
之间,如果设定为
0
,则每次发生错误时即废弃。
反射照明
从元件拍照面一侧照射的照明。照相机识别到的图像为元件的实际图像。可用反射照明识别的元件
请选择反射照明。特别是芯片元件等外形有凹凸的元件,反射照明的识别率和精度更高。
在传送动作中元件吸取
为了缩短周期时间,在将基板搬入到贴片位置前,使用吸嘴进行元件的吸取。

第
6
章
附录
6-4.
词汇表
13
6
元件摄像机
为了正确贴片,对吸取的元件进行确认的摄像机。该元件摄像机安装在 XY 上移动的贴片头上。使用
此摄像机在贴片头移动过程中识别元件。
元件识别时使用反射照明。对轮廓上有凹凸的芯片元件,使用反射照明的识别率和精度更高。
元件数据
与使用元件相关的数据。
元件供给位置数据
元件供给位置的排列数据。使用带式供料器供给时,表示元件供料器的排列。
强行结束元件更换
在元件更换作业过程中强行结束元件更换的方法。本操作仅在用户级别为[
Supervisor
]或
[
Maintenance
]时可进行。
无元件动作设定功能
发生无元件时,可选择本机的运转模式。分为两种模式,一是在发生无元件的同时停止本机的即时
停止模式,二是在发生无元件后,将该基板可贴片的元件全部贴片后再停止本机的模式。