00195755-0102_UM_D1_D2_SR605_ZF - 第113页
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料 源自軟體版本 SR.605.xx 07/2008 英文版 3.6 取置頭 113 傳統的晶片射出器不同。這不只 是節省了空間:它較小的轉 向直徑同時也代表了比傳統晶片射 出 器更小的離心力。這樣,也可大 幅度低元件在輸送過程中滑脫的風 險。 而且還有另外一個好處:所有元件的取 置頭取置週期時間都一樣, 即,它的取置速度並不會受 元 件尺寸影響。 3.6.1.2 技術資料 3 1…
3 取置機的技術資料 用戶手冊 SIPLACE D1/D2
3.6 取置頭 源自軟體版本 SR.605.xx 07/2008 英文版
112
3
圖
3.6 - 2 12
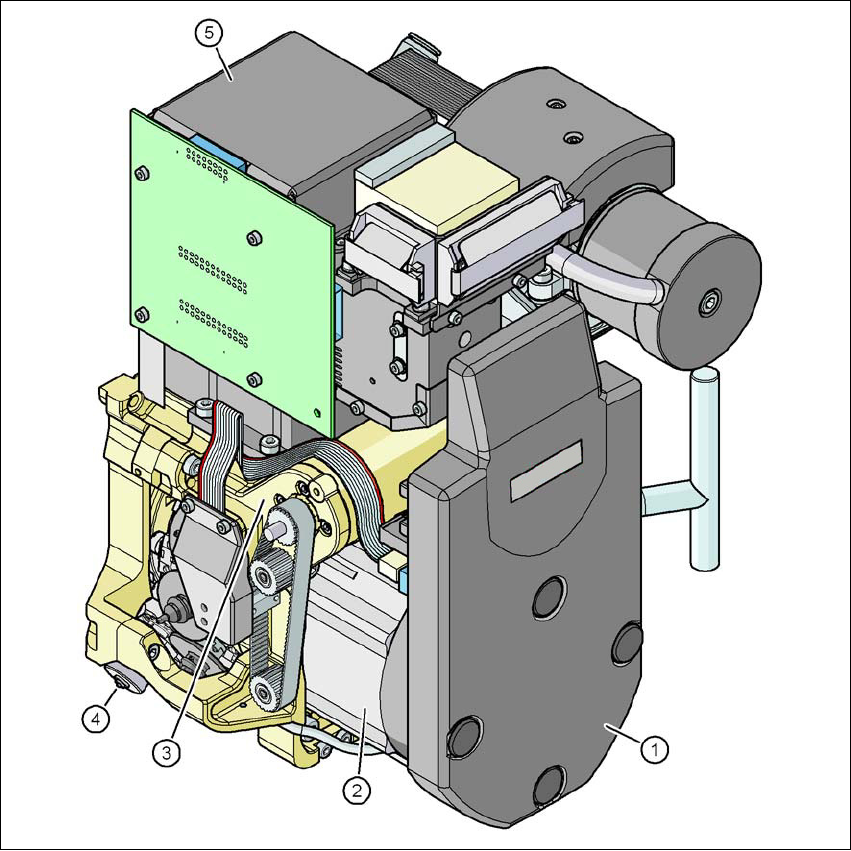
段位器收取置放頭
-
功能群組二
3
(1) 中間分配器盤 (蓋板下)
(2) 星形軸 -DR 馬達
(3) Z 軸馬達
(4) 氣閥調整驅動裝置
(5) C&P 元件攝影機
3.6.1.1 說明
12 段位器收取置放頭依收集取置原理進行工作。這表示取置頭每個循環可以拾取 12 個元件,以
光學方式定位在進一步前進到元件的位置上,並且轉動到想要的取置角度。元件接著會以吹氣方
式輕盈而精確的放置到 PCB 上。SIPLACE 收取置放頭上的 12 只吸嘴會在一個水平軸上轉向,跟
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.6 取置頭
113
傳統的晶片射出器不同。這不只是節省了空間:它較小的轉向直徑同時也代表了比傳統晶片射出
器更小的離心力。這樣,也可大幅度低元件在輸送過程中滑脫的風險。
而且還有另外一個好處:所有元件的取置頭取置週期時間都一樣,即,它的取置速度並不會受元
件尺寸影響。
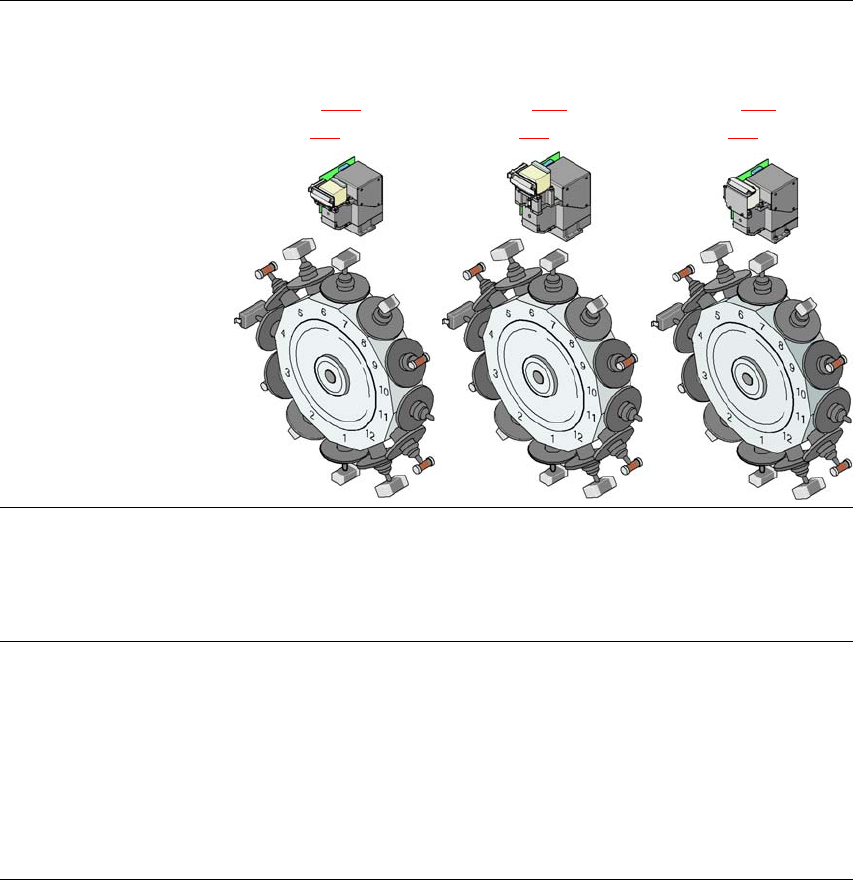
3.6.1.2 技術資料
3
12 段位器收取置放頭,
配備元件攝影機 (type
28, 18 x 18,數位)
(見第 3.9.1
節,
第 138 頁)
12 段位器收取置放頭,
配備元件攝影機 (type
29, 27 x 27,數位)
(見第 6.12 節,
第 304 頁)
12 段位器收取置放頭,
配備元件攝影機 (type
38, 16 x 16,數位)
(見第 6.13 節,
第 305 頁)
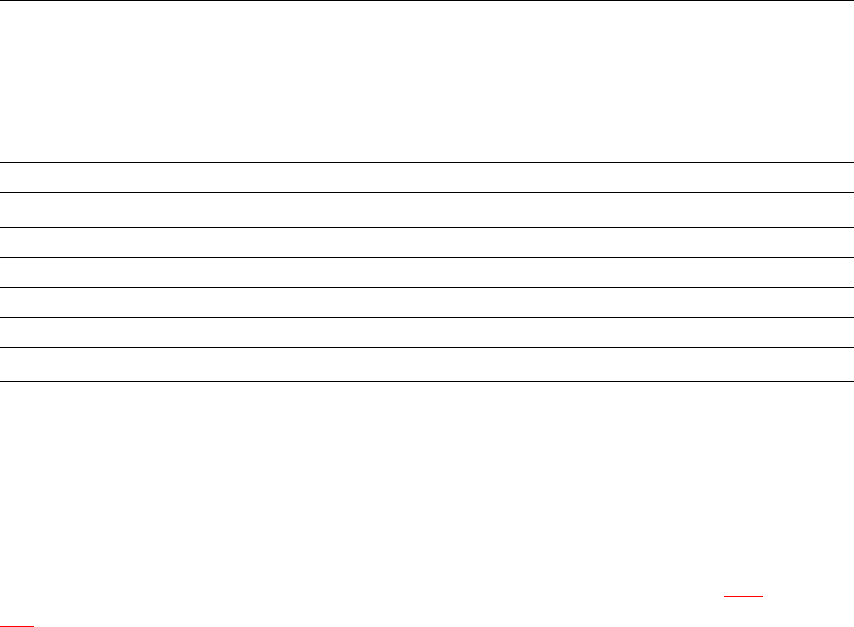
元件範圍
a
從 0402 到 PLCC44、
BGA、 μBGA、倒裝晶
片、 TSOP、 QFP、 SO
和 SO32、 DRAM
0201
b
到倒裝晶片、
bare die、 PLCC44、
BGA、 *BGA、 TSOP、
QFP、 SO 和 SO32、
DRAM
01005
c
至 16 x 16 mm²
元件規格
最大高度
最小零件腳距
最小腳距寬度
最小球距
最小錫球直徑
最小尺寸
最大尺寸
最大重量
6 mm
0.5 mm
0.2 mm
0.35 mm
0.2 mm
1.0 x 0.5 mm²
18.7 x 18.7 mm²
2 g
6 mm
0.3 mm
0.15 mm
0.25 mm
0.14 mm
0.6 x 0.3 mm²
b
18.7 x 18.7 mm²
2 g
6 mm
0.25 mm
0.1 mm
0.25 mm
0.14 mm
0.4 x 0.2 mm²
16 x 16 mm²
2 g
3 取置機的技術資料 用戶手冊 SIPLACE D1/D2
3.6 取置頭 源自軟體版本 SR.605.xx 07/2008 英文版
114
3.6.1.3 使用真空幫浦的作業
12 段位器收取置放頭可改裝以適應真空幫浦作業,從而更有效地產生真空 (見第 6.17 節,第
312 頁)。
可設定的功率等級
1
2
3
4
5
可設定的取置力 [N]
2.4 ± 0.5
2.4 ± 0.5
3 + 1
4 + 1
5 + 1
吸嘴型式
9xx 9xx 9xx
X/Y 軸精確度
d
± 50 μm/3σ, ± 67 μm/4σ ± 50 μm/3σ, ± 67 μm/4σ ± 50 µm/3σ, ± 67 µm/4σ
角度精確度
± 0.53°/3σ, ± 0.71°/4σ ± 0.53°/3σ, ± 0.71°/4σ ± 0.53°/3σ, ± 0.71°/4σ
元件範圍
98% 98.5% 96%
元件攝影機類型
28 29 38
照明等級
555
可用的照明等級設定
256
5
256
5
256
5
a) 請注意,可以放置的元件範圍還會受到襯墊幾何形狀、客戶自訂標準及封裝誤差的影響。
b) 含 0201 套件
c) 含 01005 套件
d) 精確值可使用廠商中立的 IPC 標準測量得出。