00195755-0102_UM_D1_D2_SR605_ZF - 第122页
3 取置機的技術資料 用戶手冊 SIPLAC E D1/D2 3.7 懸臂系統 源自軟體版本 SR.605.xx 07/2008 英文版 122 3.7 懸臂系統 3.7.1 懸臂位置 3 圖 3.7 - 1 懸臂位置 (1) 懸臂 1 ( D1 和 D2 ) (2) 懸臂 2 ( D2 ) 懸臂系統由兩個功能群組構成: – X 軸和 – Y 軸
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.6 取置頭
121
吸嘴型式 5xx (標準)
4xx + 轉接頭
8xx + 轉接頭
9xx + 轉接頭
5xx (標準)
4xx + 轉接頭
8xx + 轉接頭
9xx + 轉接頭
5xx (標準)
4xx + 轉接頭
8xx + 轉接頭
9xx + 轉接頭
X/Y 軸精確度
c
± 37.5 µm/3σ
± 50 µm/4σ
± 37.5 µm/3σ
± 50 µm/4σ
± 30 µm/3σ
± 40 µm/4σ
角度精確度
± 0.053°/3σ
± 0.071°/4σ
± 0.053°/3σ
± 0.071°/4σ
± 0.053°/3σ
± 0.071°/4σ
元件範圍
99.8% 99.9% 99.8%
元件攝影機類型
36 33 25
照明等級
666
可用的照明等級設定
256
6
256
6
256
6
a) 請注意,可以放置的元件範圍還會受到襯墊幾何形狀、客戶自訂標準和封裝公差的影響。
b) 當使用標準吸嘴
c) 精確值可使用廠商中立的 IPC 標準測量得出
3 取置機的技術資料 用戶手冊 SIPLACE D1/D2
3.7 懸臂系統 源自軟體版本 SR.605.xx 07/2008 英文版
122
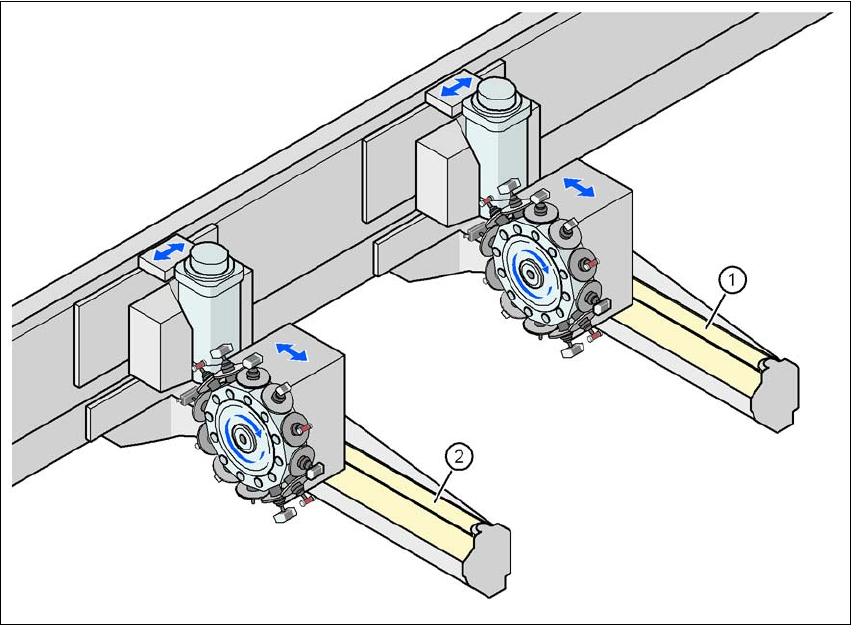
3.7 懸臂系統
3.7.1 懸臂位置
3
圖
3.7 - 1
懸臂位置
(1) 懸臂 1 (D1 和 D2)
(2) 懸臂 2 (D2)
懸臂系統由兩個功能群組構成:
– X 軸和
– Y 軸
用戶手冊 SIPLACE D1/D2 3 取置機的技術資料
源自軟體版本 SR.605.xx 07/2008 英文版 3.7 懸臂系統
123
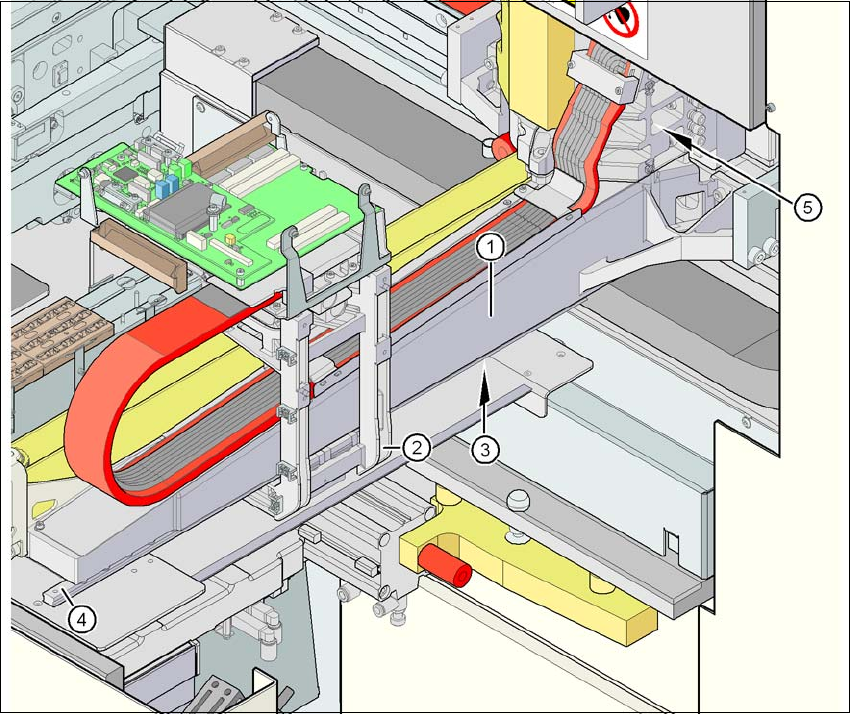
3.7.2 X 軸的構造
3
圖
3.7 - 2 X
軸的構造
X 軸基本上由下列主要模組構成:
–懸臂 (1)
– 取置頭座 (2)
– 線性測量系統 (3)
– 線性測量系統 (4)
– X 軸三相交流伺服馬達 (5)
取置頭座裝有下列元件:
– 副懸臂攝影機 (PCB VISION 模組攝影機)
– 取置頭板
–用於 X 軸測量系統的測量頭
– 收取置放頭 (SIPLACE D2)
– 收取置放頭和拾取置放頭 (SIPLACE D1)