Micron Technical Reference V9 Volume 1.pdf - 第146页
MACHINE CONTROL OVERVIEW 7.2 Technical Reference Manual C hapter Issue 12, Feb 18 All machine functions are initiated by the DEK software installed on the PC. The PC transmits and receives information to the NextMove ES …
MACHINE CONTROL
OVERVIEW
Chapter Issue 12, Feb 18 Technical Reference Manual 7.1
CHAPTER 7 MACHINE CONTROL
OVERVIEW
NOTE
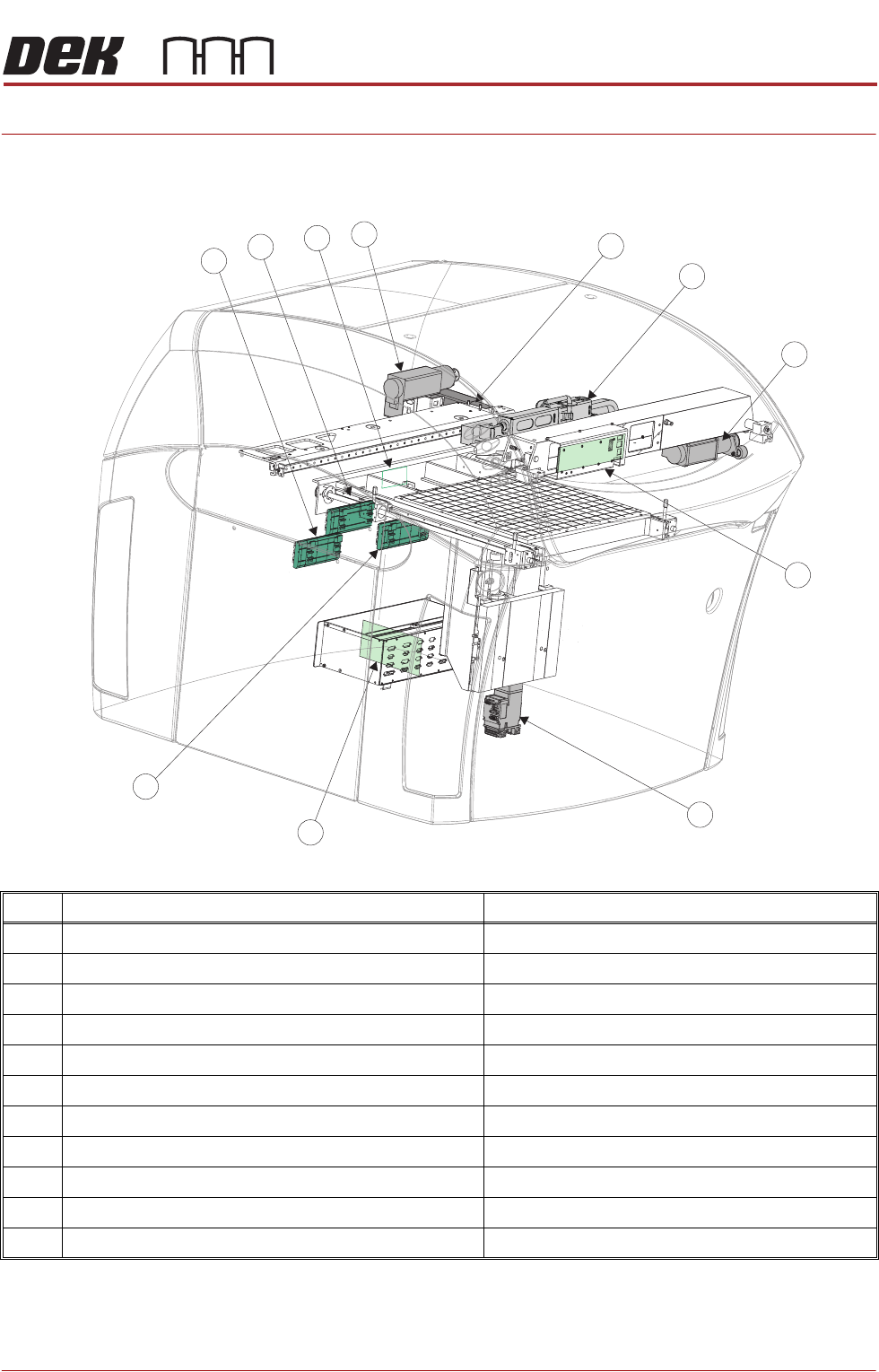
Node boards 1, 2, 4, 5 and servo node 9 are positioned and accessed from the
front of Type 4 machines
Item Node Description
1 Servo Node 8 Camera X Motor (Rotary Servo Drive Only)
2 Stepper Node 10 Paste Dispenser Motor
3 Servo Node 7 Print Carriage Motor
4 I/O Node Board 3 (behind panel) Print Carriage I/O
5 Servo Node 6 Rising Table Motor
6 I/O Node Board 1 (NextMove ES) Inside Machine Control Enclosure
7 I/O Node Board 4 (with fabric feed brake module) Screen Cleaner I/O
8 I/O Node Board 2 Main Machine I/O
9 I/0 Node Board 5 Shared functionality OTS and HTC
10 I/O Node 18 Proactiv Interface
11 Servo Node 9 Camera Y Motor (Rotary Servo Drive Only)
1
2
3
4
5
6
7
8
11
10
9
MACHINE CONTROL
OVERVIEW
7.2 Technical Reference Manual Chapter Issue 12, Feb 18
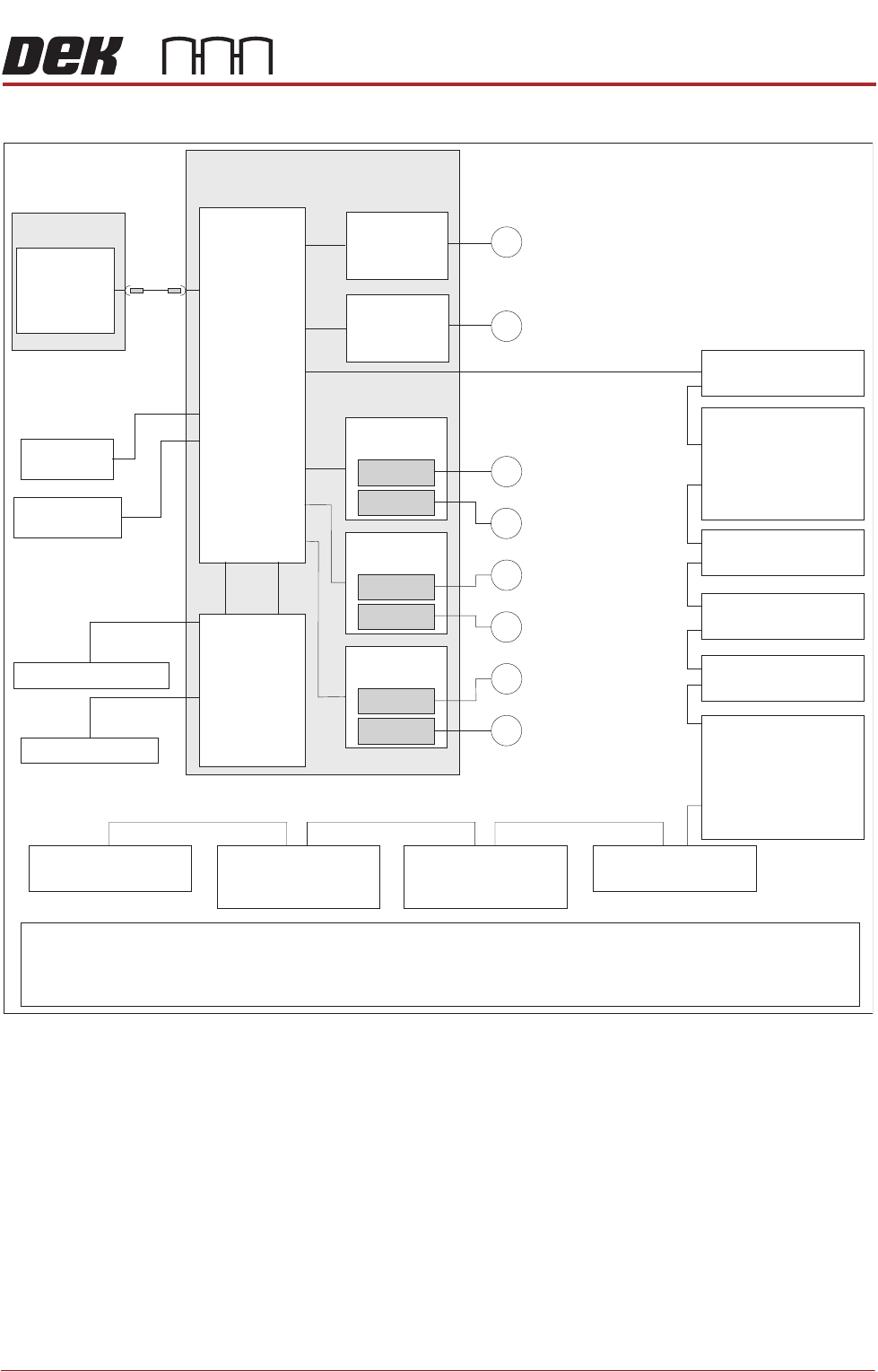
All machine functions are initiated by the DEK software installed on the PC. The
PC transmits and receives information to the NextMove ES card in the M36
Machine Control Enclosure using a single USB lead. The NextMove ES card
incorporates its own processor which handles machine motions and switch/
sensor feedback, this frees up the PC processor to run the MMI and other
peripherals.
The NextMove ES card incorporates a USB encoder/decoder and a CAN
encoder/decoder interfacing between the PC and the following:
• NextMove Interface Card
• Stepper Drive Cards
• EF Servo Drive Cards
• I/O Node Boards (via CAN Bus)
• Servo/Stepper Nodes (via CAN Bus)
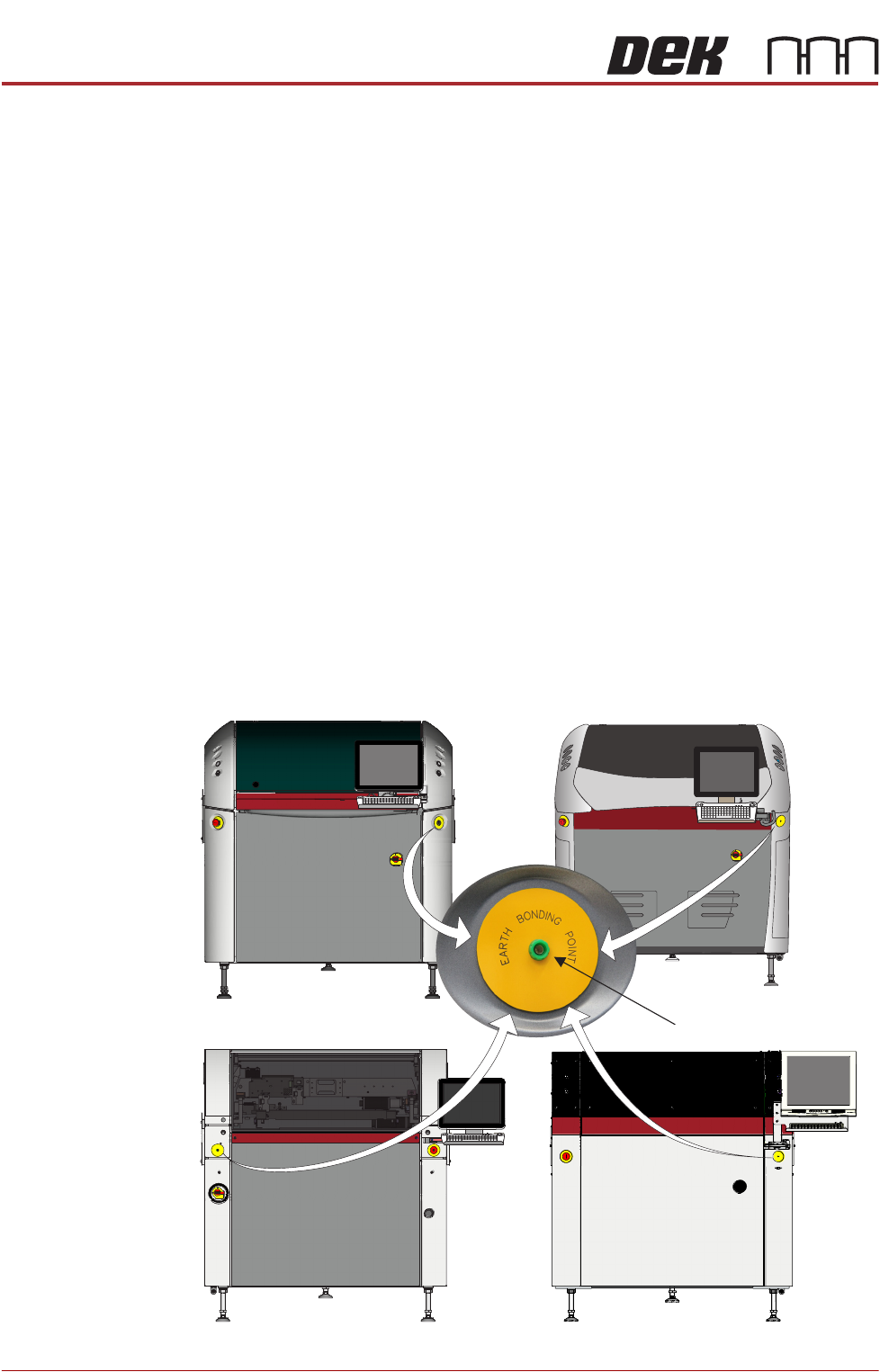
CAUTION
ANTI-STATIC HANDLING.
Standard precautions must be adhered to when
handling electronic cards and configuring and inserting into the enclo-
sures.
NOTE
ASM recommends an antistatic wrist band that incorporates a 1 meg ohm
resistor.
Figure 7-1 Antistatic Wrist Band Connection
ESD Connection
MACHINE CONTROL
ELECTRICAL SCHEMATIC
Chapter Issue 12, Feb 18 Technical Reference Manual 7.3
ELECTRICAL SCHEMATIC
NextMove
Interface
20 Digital Inputs
8 Digital Outputs
I/O Node 4 Board
Screen Cleaner
Servo Node 8
Camera X Motor
(Rotary Motors Only)
CAN Terminator
Servo Node 9
Camera Y Motor
(Rotary Motors Only)
PC
USB
Motherboard
NextMove ES
(I/O Node 1)
4 Analogue
Outputs
2 Analogue
Inputs
Dual Stepper
Card X3
Step 2
Step 5
Dual Stepper
Card X2
Step 3
Step 4
Dual Stepper
Card X1
Step 0
Step 1
Stepper Node 10
Paste Dispense Motor
OR
Servo Node 17
ProFlow Paste
Conditioning
Servo Node 6
Rising Table Motor
I/O Node 3 Board
Print Carriage
Servo Node 7
Print Carriage Motor
I/O Node 2 Board
Main Machine
Various Nodes
depending on
optional rail system
fitted (see Rail
Nodes Figure in CAN
Bus section)
M
X Forward Actuator
M
Front Squeegee
M
Y Actuator
M
X Rear Actuator
M
Rear Squeegee
M
Moving Rail
I/Ps O/Ps
M36 Machine Control Enclosure
CAN Bus
EuroFlex
Card X6
Axis 0
M
Camera X Motor (Linear Motors Only)
M
Camera Y Motor (Linear Motors Only)
EuroFlex
Card X7
Axis 1
NOTE
Depend nt upon configuration the servo drive consists of either servo nodes 8 and 9 (rotary motor systems) ore
two EuroFlex cards for the Camera X and Camera Y axes (linear motor systems). The linear motor system uses 2
analogue ouputs from the NextMove ES card and 2 digital inputs from the NextMove Interface card.