SIPLACE Machine de placement 80 S FG.pdf - 第207页
Notice d’exploitation SIPLACE 80 S/F/G 7 Systèmes Vision Edition 07/97 Version du logiciel à partir de SR.010. xx 7. 2 Sy stème Vision pour cartes 7 - 15 ● L'opérati on de m esure se d éroule e n 2 étap es: - Procéd…

7 Systèmes Vision Notice d’exploitation SIPLACE 80 S/F/G
7.2 Système Vision pour cartes Edition 07/97 Version du logiciel à partir de SR.010.xx
7 - 14
et les voyants LED pour
-
le CPU
-
le processeur Vision
-
l'entrée caméra
-
l'écran
Les interrupteurs pour "RESET" et "ABORT" se trouvent sous les voyants LED
●
l'interface caméra MVS500 (platine d'extension) pouvant recevoir jusqu'à 4 caméras CCD
7.2.2 Caractéristiques techniques
Caméra : SONY XC77
Nombre de pixels : caméra 768 (H) x 494 (V)
image 640 (H) x 484 (V)
Champ visuel : 5,7 mm x 5,7 mm
Eclairage : Eclairage incident (activé lors de l'opération de mesure)
Traitement de l'image : Principe de corrélation, système des valeurs de gris
Durée cycle processeur : < 200 msec
Ecran : Moniteur RGB (Mode VGA) 640 x 484 pixels du
calculateur de module
Marques : Mémoire de bibliothèque d'une capacité maximale de 255
définitions de marque
7.2.3 Description de fonctionnement
Avant le placement, le système Vision détecte la position, l'angle de décalage en rotation et le cisaillement de
la carte en fonction de la position des marques. Des écarts des valeurs de consigne sont alors évalués pour
corriger les positions de placement des composants.
Chaque carte doit comporter au moins 2 marques pour que le système puisse reconnaître des écarts de la
position et de l'angle de rotation de la carte. Si une carte est dotée de 3 marques, vous obtenez des informa-
tions supplémentaires concernant des déformations de la carte et du layout de la carte.
7.2.4 Mode de fonctionnement
Avant de pouvoir reconnaître une marque, elle doit être lue en mode d'apprentissage, c'est-à-dire, les para-
mètres de la structure de marque doivent être enregistrés dans le système Vision cartes pour le dessin de la
marque.
●
La structure de la marque est lue en mode d'apprentissage à l'aide de la caméra Vision cartes, fixée sur la
tête de placement et grâce au programme Vision:<~>
L'unité d'analyse Vision détermine les paramètres significatifs des marques à l'aide du traitement d'image
digital:
Notice d’exploitation SIPLACE 80 S/F/G 7 Systèmes Vision
Edition 07/97 Version du logiciel à partir de SR.010.xx 7.2 Système Vision pour cartes
7 - 15
●
L'opération de mesure se déroule en 2 étapes:
-
Procédé de recherche du motif à 2D (procédé à 2 dimensions) dans la trame grossière et
détermination provisoire des coordonnées de marque.
-
L'opération de recherche du motif à 1D (procédé à une dimension) pour la reconnaissance exacte de
la position des marques.
Pour le procédé de recherche de motif à 2D, la fenêtre de reconnaissance de motif est divisée en zones de
moxels. Par moxel (
mo
saïque de pi
xel
) on comprend des champs de pixels avec p.ex. 16 x 16, 8 x 8 etc. de
pixels. Plus le nombre de pixels est petit, plus la résolution est élevée et plus la vitesse de recherche est faible.
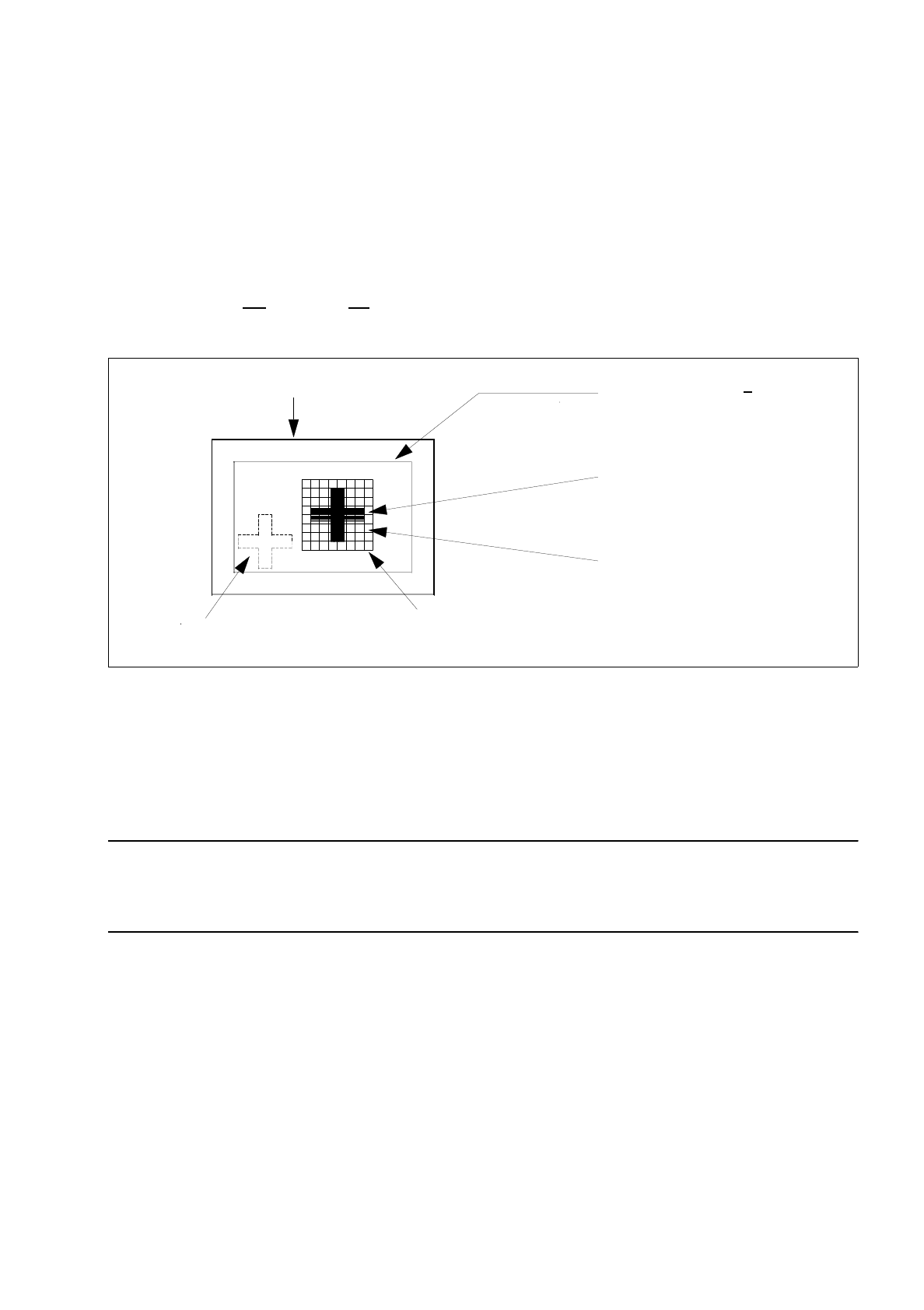
Fig. 7.2.1 Explication du champ visuel caméra, de la zone de recherche et de la fenêtre de recherche de motif
La fenêtre de recherche de dessin modèle est déplacée sur la zone de recherche en pas de moxels. Ainsi on
calcule les valeurs de gris pour chacun des moxels de la marque de référence. Cette structure de données
comprend assez d'informations sur la structure grossière et la position de la marque de référence.
NOTA
La fenêtre doit être choisie aussi petite que possible pour atteindre une vitesse de recherche élevée.
Cependant elle doit être suffisamment grande pour reconnaître clairement la marque.
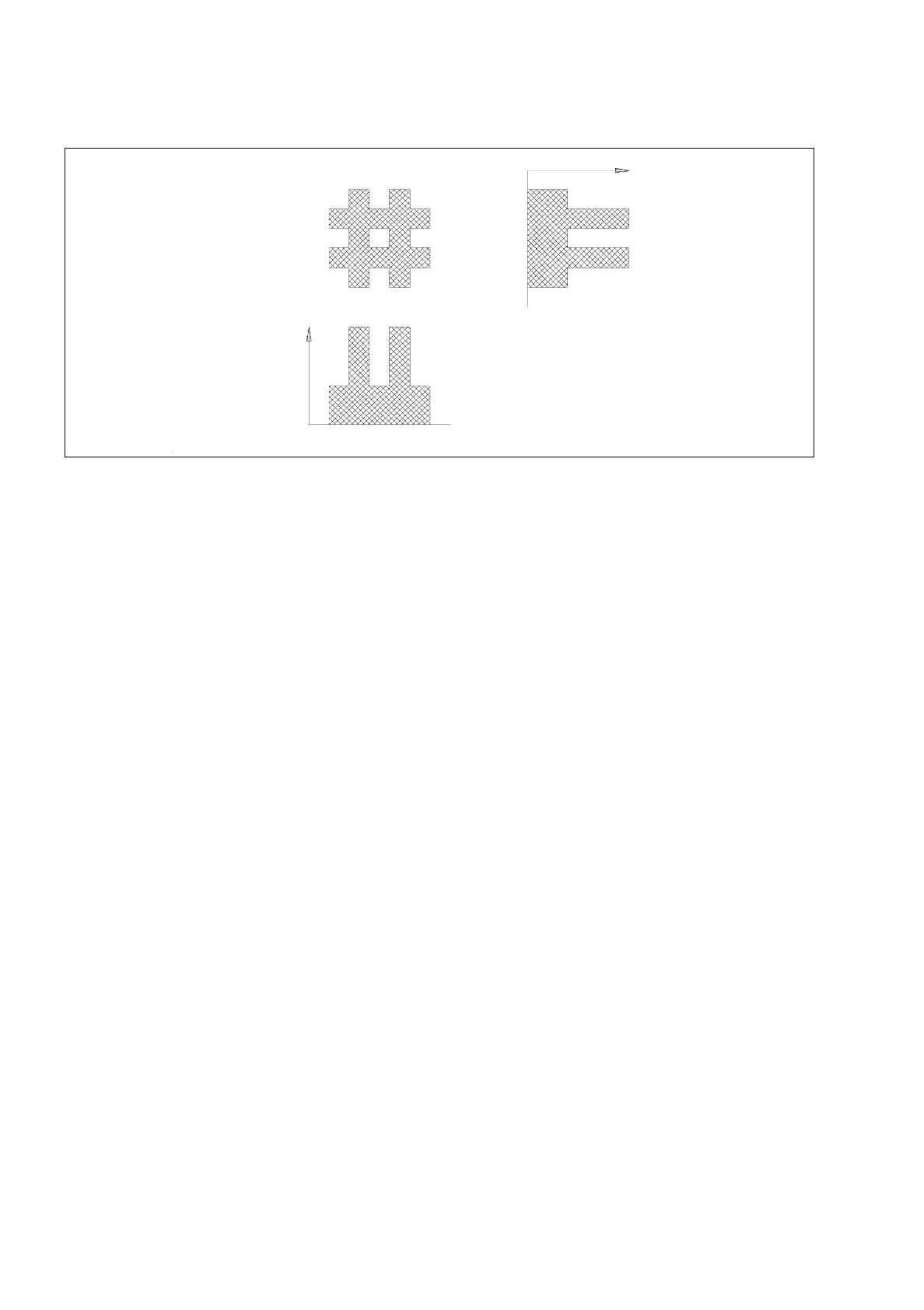
Pour la détection exacte du motif et de la positon de la marque, on se sert du procédé de recherche à 1D.
L'image de la marque est divisée en lignes et en colonnes, les valeurs de gris à l'intérieur de chacune des
lignes et de chacune des colonnes sont additionnées. La figure suivante explique ce processus à partir d'une
croix double.
Zone de recherche <
champ visuel caméra
(dans cette zone on recherche
la marque)
Marque de référence
Moxel = champ de pixels
p.e. 16 x 16 pixel
Champ de recherche de motif
(contenant la marque de référence)
Champ visuel caméra
Marque à chercher
7 Systèmes Vision Notice d’exploitation SIPLACE 80 S/F/G
7.2 Système Vision pour cartes Edition 07/97 Version du logiciel à partir de SR.010.xx
7 - 16
Fig. 7.2.2 Profil de lignes et de colonnes d’une croix double
●
A partir des profils horizontaux et verticaux, la position de la marque est exactement déterminée. Les para-
mètres de structure ainsi obtenus sont enregistrés dans le calculateur de module après l'apprentissage.
●
Ensuite, on teste le modèle mis en mémoire. Pour cela, le portique déplace la caméra pour cartes dans les
4 coins de la zone de recherche au-dessus de la carte (worst case). Lors de ce test, le système Vision doit
reconnaître quatre fois la marque.
●
Pour finir, les coordonnées de chacune des marques (au moins deux) sont enregistrées manuellement
dans le fichier NU ou transmises du fichier CAD au fichier NU. Ainsi les coordonnées et les paramètres de
structure pour la carte à assembler sont déterminés comme modèle dans le système.
●
Lors du placement, les paramètres de marque sont de nouveau déterminés à l'aide des méthodes de
traitement d'images décrits ci-dessus, procédés à 2D et à 1D. On déplace la fenêtre de recherche de
motif par pas de moxels sur le champ de recherche et on cherche à faire concorder le mieux possible les
valeurs de gris de la marque de référence avec celles de marque de la carte (procédé de corrélation). En
cas de concordance de la marque de référence et de la marque de recherche, la corrélation maximale est
atteinte.
●
Une fois la marque définie, on commence la recherche à 1D en déterminant très exactement le contour
géométrique et les coordonnées de la marque. La forme exacte de la marque et les coordonnées sont
définies à la fois par les profils des colonnes et des lignes (se reporter à la fig. précédente) au moyen du
procédé de corrélation. A partir des coordonnées ainsi obtenues, on définit la position, le décalage en rota-
tion et le cisaillement de la carte.
Les circuits marqués défectueux (= points d'encre) sont également saisis et analysés selon la méthode
décrite ci-dessus.
Marque
Somme des
valeurs de gris
par colonne:
profil de colonnes
Somme des
valeurs de gris
par ligne:
profil de lignes