SIPLACE Machine de placement 80 S FG.pdf - 第212页
7 Systèmes V ision Notice d’exploi tation SIPLACE 80 S/F/G 7.2 Système Vision pour cartes Edition 07/97 Version du l ogic iel à partir de SR.010.xx 7 - 20 ● Nombre de marques Sur sub strats cér amiques et petit es carte …
Notice d’exploitation SIPLACE 80 S/F/G 7 Systèmes Vision
Edition 07/97 Version du logiciel à partir de SR.010.xx 7.2 Système Vision pour cartes
7 - 19
-
Epaisseur (d)
Pour les marques en étain veiller particulièrement à ce qu'un bombé de
1
/
10
de la largeur de structure
ne soit pas dépassé. Sinon, la marque ne peut plus être éclairée uniformément. Il en résulte des varia-
tions de réflexion ainsi que des réflexions parasites. Une reconnaissance des marques n'est plus
garantie.
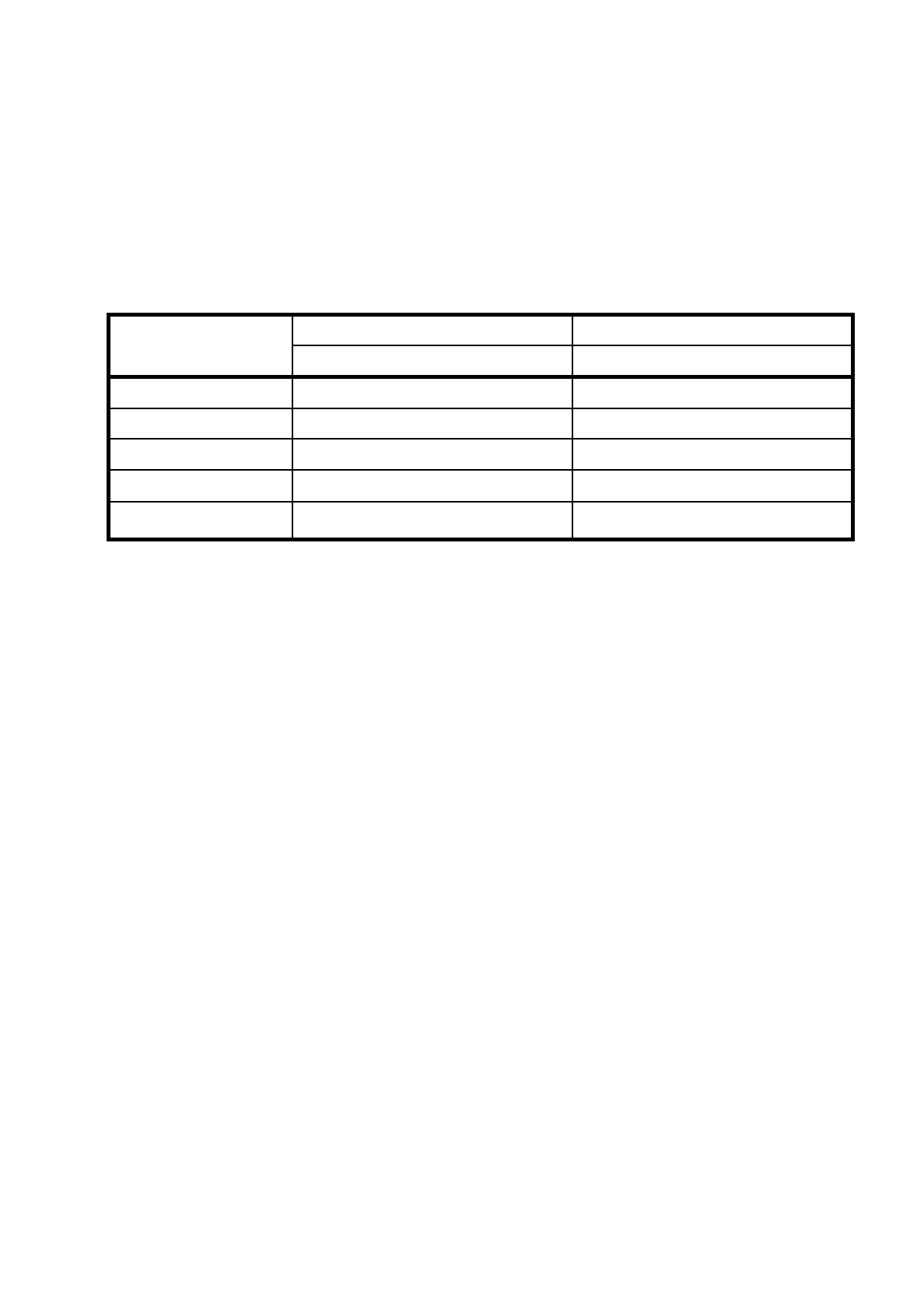
Dimensions de marques recommandées
Valorisation des formes de marque
Dans les cas de structures en étain et de faibles tolérances de dimensions (faibles écarts de gravure), on peut
considérer le carré plein et le cercle plein comme des formes de marque très favorables (rapport épaisseur
marque / épaisseur structures en étain grand!). Si les tolérances de dimensions deviennent plus grandes, il
faut préférer le cercle plein au carré plein.
Pour la croix simple et la croix double, le cuivre clair est avantageux.
●
Surface de marque
Veillez à une surface de marque plane, faiblement oxydée. Evitez d'imprégner la marque de vernis épar-
gne car sinon, le contraste par rapport au fond est réduit ou des réflexions parasites peuvent surgir.
Mêmes effets pour des marques en étain.
●
Contraste de marque
Pour une bonne reconnaissance, la marque doit se distinguer nettement du fond par sa luminosité c'est-à-
dire, sur substrat sombre des marques claires s'imposent et inversement. Sur fond de cuivre ou d'étain,
des marques sombres sont recommandées. Pour des substrats céramiques à surface claire et présentant
des propriétés de réflexion désavantageuses, on peut souvent améliorer le contraste en appliquant un
fond foncé.
Type de marque Croix simple Croix double
Plage Plage idéale Plage Plage idéale
Longueur (l) 0,9 mm (min) 2,0 mm 1,8 mm 2,75 mm
Largeur (b) 0,9 mm (min) 2,0 mm 1,8 mm 2,75 mm
Epaisseur de trait (s) 0,3 - 1,5 mm 0,5 mm 0,3 - 0,75 mm 0,5 mm
Distance entre traits (a) — — 0,5 mm (min) 0,75 mm
Epaisseur (d)
<
1
/
10
de la largeur de la structure <
1
/
10
de la largeur de la structure
Tab. 7.2 - 1 Dimensions de marques recommandées
7 Systèmes Vision Notice d’exploitation SIPLACE 80 S/F/G
7.2 Système Vision pour cartes Edition 07/97 Version du logiciel à partir de SR.010.xx
7 - 20
●
Nombre de marques
Sur substrats céramiques et petites cartes, deux marques suffisent en règle général. Pour des cartes plus
grandes, il est recommandé d'en définir trois. Les différentes marques peuvent présenter des structures
différentes. Mais vous facilitez la reconnaissance si la même structure est utilisée pour chacune des mar-
ques.
-
Correction avec 2 marques position sur x
position sur y
écart de rotation de carte
-
Correction avec 3 marques: En idéal, les droites passent par deux centres de marque parallèles aux
axes x et y
position sur x
position sur y
écart de rotation de la carte
cisaillement
décalage
de la carte dans le sens x
décalage
de la carte dans le sens y
NOTA
En aucun cas, il ne faut positionner 3 marques de telle façon qu'elles soient alignées.
●
Distance entre les marques
Les marques peuvent être positionnées sur n'importe quel point de la carte. Il est judicieux d'avoir des
écarts aussi importants que possible entre les marques sur les deux axes. Plus les marques sont éloi-
gnées, plus exacte sera la reconnaissance optique de la position et de l'angle.

Notice d’exploitation SIPLACE 80 S/F/G 7 Systèmes Vision
Edition 07/97 Version du logiciel à partir de SR.010.xx 7.3 Système Vision pour composants
7 - 21
7.3 Système Vision pour composants
Le système Vision pour composants détecte la position exacte d'un composant en déterminant d'une part, le
décalage du centre du composant par rapport à l'axe symétrique de la pipette et d'autre part, le décalage en
rotation par rapport à la position relative de rotation de la pipette. L'analyse de la configuration des pattes en
sens des x et des y est également possible.
7.3.1 Système Vision pour composants de la machine SIPLACE 80S
7.3.1.1 Description du système
Le système Vision pour le centrage des composants comprend:
●
le système optique de reconnaissance de position des composants
Chaque tête de placement revolver dispose d'un propre système de reconnaissance des composants à la
station 8 du barillet (voir fig. 7.1.2).
●
l'unité d'analyse Vision
Pour chaque portique existe dans la baie de commande une unité d'analyse pour la reconnaissance de
position des cartes et des composants (voir fig. 7.1.3).
Le système optique de reconnaissance de position se compose d'une caméra CCD avec miroir de déviation,
de l'optique de reproduction et d'un système d'éclairage LED. Le champ visuel de la caméra CCD (caméra
SONY XC75) est de 14 mm x 18 mm. Pour la détection de position ou pour le test des pattes, le composant
est éclairé régulièrement en épiscopie par les rangées de LED et représenté de façon très contrastée sur le
Chip CCD au moyen de l'optique. A l'aide du traitement digital d'images, le principe de corrélation, procédé
HALE (High Accuracy Lead Extraction), on détermine les paramètres pour la position, l'angle de décalage en
rotation et l'état des pattes. L'unité d'analyse Vision (MVS) a déjà été décrite au paragraphe 7.2.1 étant donné
qu'elle assure les mêmes fonctions pour l'évaluation des cartes et des composants.
7.3.1.2 Caractéristiques techniques
Caméra : SONY XC75
Nombre de pixels: Caméra 768 (H) x 494 (V)
Image 640 (H) x 484 (V)
Champ visuel : 19 mm x 25 mm
Eclairage : Eclairage incident (lumière infrarouge)
Traitement d'image : Principe de corrélation, procédé HALE des valeurs de gris
(High Accuracy Lead Extraction)