00193576-02 - 第98页
3 Dados técnicos Manual do usuário S IPLACE HF 3.3 Cabeças de montar Versão de software SR.504.xx Edição 07/2003 PT 98 servoa mplifica dores e , por tanto, o movi mento a realiz ar pel os eixo s. O s valor es do v ácuo n…
Manual do usuário SIPLACE HF 3 Dados técnicos
Versão de software SR.504.xx Edição 07/2003 PT 3.3 Cabeças de montar
97
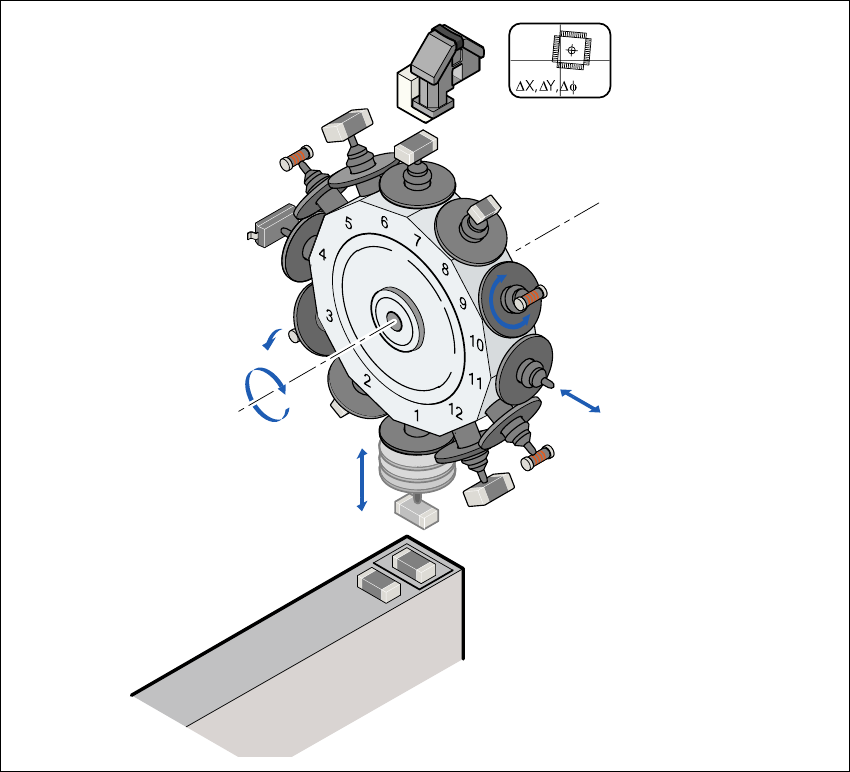
A estrela roda com os seus 12 segmentos em torno do eixo DR. Os segmentos são suportes dos
tubos. Em cada tubo está assente um bocal. Desta forma, os componentes são aspirados e trans-
portados da posição de coleta/montagem (1) para a posição de rejeição (3), para a posição de
centragem óptica (7) ou para a posição de rotação (9).
O eixo Z executa um movimento vertical. Cada tubo que se encontra na posição mais baixa da
estrela (1) é subida ou descida por este eixo. Desta forma, os componentes são retirados dos
alimentadores e colocados na PCI. Ao eixo Z é dado o nome de "eixo inteligente". "Regista" a
altura de coleta de cada trilha do alimentador e a altura de montagem para cada componente.
Assim, é possível acelerar o processo de montagem. A força de colocação programada é mantida
constante.
3
Fig. 3.3 - 4 Descrição do funcionamento
O eixo DP roda o componente centrado opticamente para a posição pretendida para a monta-
gem. As sequências do movimento dos eixos de rotação e também dos eixos de translação são
comandadas por circuitos de regulação. Sensores para a posição e para a velocidade transmitem
os valores reais do movimento dos eixos ao comando dos mesmos. A partir da comparação entre
os valores teóricos e reais, são determinados os parâmetros da força e da velocidade para os
Câmara de componentes
Eixo DP
Rodar o CO para a posição
de montagem
Recolher ou colocar o tubo
Eixo Z
Coleta ou
montagem do CO
Eixo DR
Rotação da estrela
Rejeitar o CO
3 Dados técnicos Manual do usuário SIPLACE HF
3.3 Cabeças de montar Versão de software SR.504.xx Edição 07/2003 PT
98
servoamplificadores e, portanto, o movimento a realizar pelos eixos. Os valores do vácuo no bo-
cal são permanente controlados eletronicamente durante todo o processo de coleta e de monta-
gem para que a taxa de erros seja a mais reduzida possível.
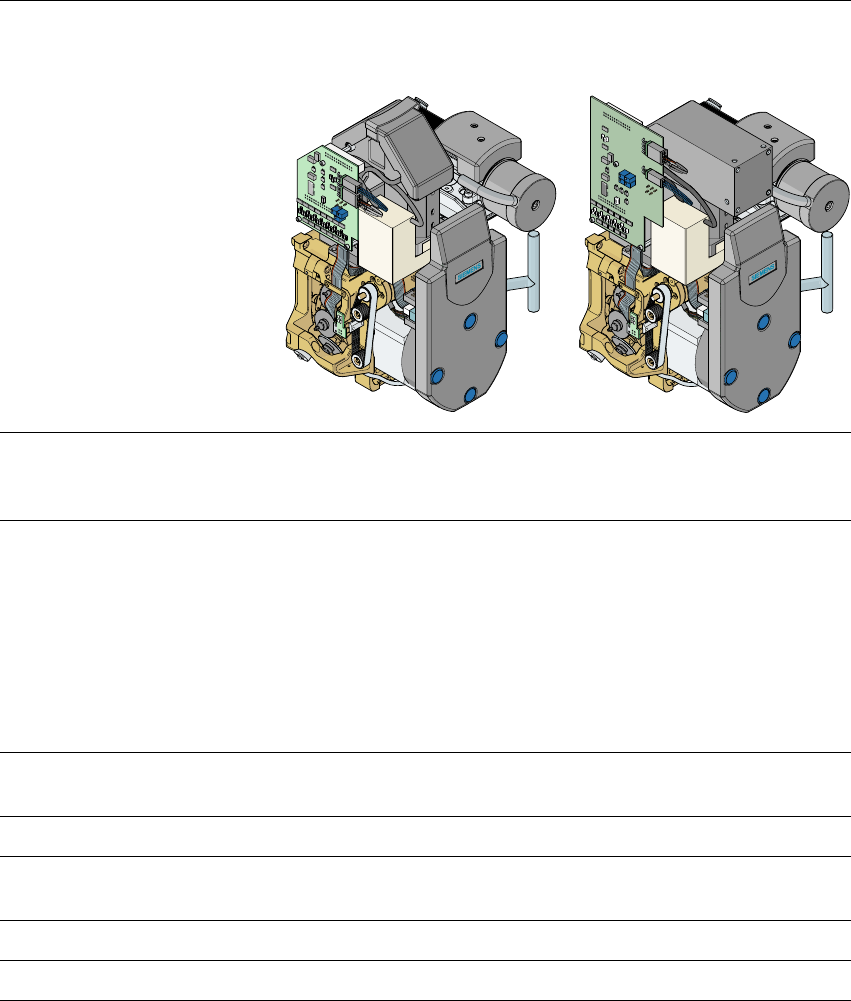
3.3.2.3 Dados técnicos
3
Cabeça Collect&Place de
12 segmentos com câmara
standard de componentes
Cabeça Collect&Place de 12
segmentos com câmara DCA
Gama de componentes 0201 até PLCC44, BGA,
µBGA, Flip-Chip, TSOP, QFP,
SO até SO32, DRAM
0201 até Flip-Chip, Bare Die
Especificações do compo-
nente
Altura máx.
Retícula mín. dos pinos
Retícula mín. de bump
Ball-Bump mín. ∅
Dimensões mín.
Dimensões máx.
Peso máx.
6 mm
0,5 mm
0,35 mm
0,2 mm
0,6 mm x 0,3 mm
18,7 mm x 18,7 mm
2 g
6 mm
0,4 mm
0,2 mm
0,11 mm
0,6 mm x 0,3 mm
13 mm x 13 mm
2 g
Força de colocação
programável 2,4 N - 5,0 N 2,4 N - 5,0 N
Tipos de bocais 9xx 9xx
Capacidade máx. de
montagem 5.000 CO/h 5.000 CO/h
Precisão de centragem X/Y ± 60 µm / 4 σ ± 55 µm / 4 σ
Precisão angular ± 0,7°/4 σ ± 0,7°/4 σ
Manual do usuário SIPLACE HF 3 Dados técnicos
Versão de software SR.504.xx Edição 07/2003 PT 3.3 Cabeças de montar
99
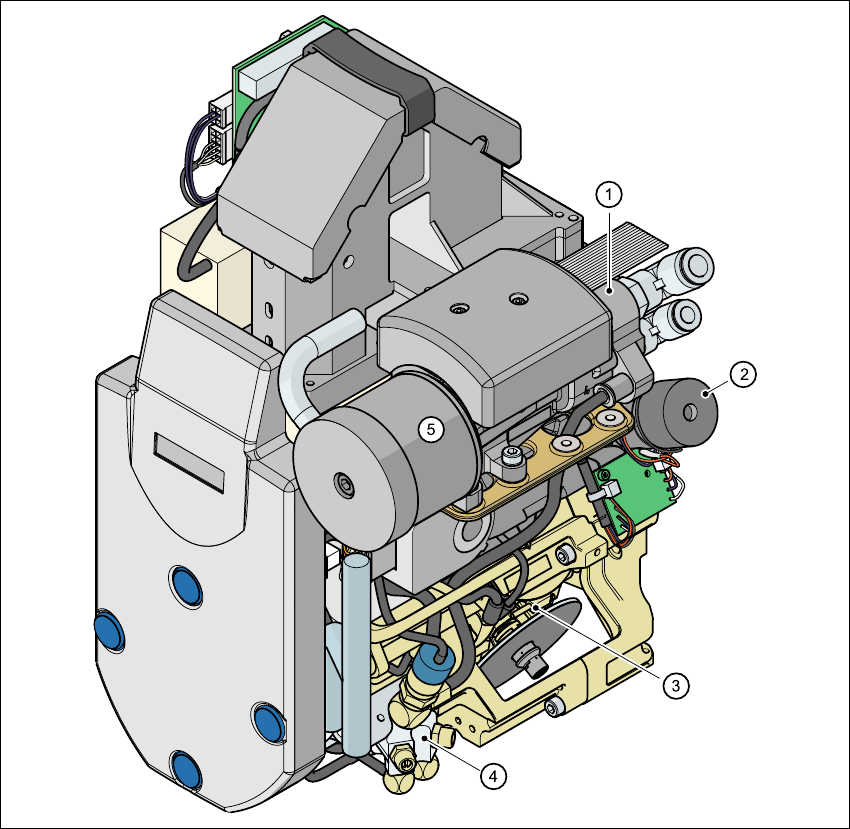
3.3.3 Cabeça Collect&Place de 6 segmentos para montagem de PCI em alta
velocidade
3
Fig. 3.3 - 5 Cabeça Collect&Place de 6 segmentos - grupos funcionais, parte 1
3
(1)Gerador de vácuo
(2)Estação giratória - eixo DP
(3)Estrela com 6 tubos - eixo DR
(4)Válvula de sopro de ar
(5)Silenciador