00197911-03_UM_X-Serie-S_ET.pdf - 第140页
3 Tehnilised andmed ja sõlmed Kasutusjuhend SIPLACE X-Seeria 3.5 Ladumispea Alates tarkvaraversioonist 710.0 Väljaanne 12/2016 140 3.5.3.2 SIPLACE Spee dSt ar (C & P20 P) tehnilised andmed 3 SIPLACE SpeedS tar (C&…
Kasutusjuhend SIPLACE X-Seeria 3 Tehnilised andmed ja sõlmed
Alates tarkvaraversioonist 710.0 Väljaanne 12/2016 3.5 Ladumispea
139
3.5.3.1 Kirjeldus
SIPLACE SpeedStar (C&P20) töötab Collect&Place-põhimõttel, st ühe tsükli vältel haarab ladu-
mispea kakskümmend komponenti. Haaramis- ja ladumisasendis kontrollib komponendisensor
imiotsakul komponendi olemasolu. Ladumisasendisse liikumisel tsentreeritakse komponent opti-
liselt ning pööratakse ladumisasendile vastava nurga alla. Lõpuks asetatakse komponent õhujoa
abil õrnalt ja täpselt trükkplaadile.
C&P20 P tööpea parandab ladumist veelgi. C&P20 P tööpea kompaktne koosteviis võimaldab ka
väga lühikesi tsükliaegu. Seejuures paikneb tähetelg trükkplaadi tasandi suhtes kaldu. Selline
geomeetria võimaldab paigutada segmente kitsaimasse ruumi.
Komponendikaamera on ka edaspidi C&P20 P tööpeasse integreeritud. Võrreldes väliste tsent-
reerimiskaameratega on antud juhul liikumisteekond oluliselt lühem. Iga segment omab imiotsaku
pööramiseks ka isiklikku DP-ajamit. Seetõttu pole vaja imiotsakuid õigesse asendisse pöörata ük-
siku tööpeajaama pööramisega. Need pööratakse õigesse ladumisasendisse suvalisel ajal üks-
teisest sõltumatult.
Igal segmendil on eraldi vaakumgeneraator. See vähendab oluliselt vaakumi ja õhuvoolu ümber-
lülitamiseks kuluvat aega. Nii saab kontrollida ka igas imiotsakus hoideahela poolt tekitatavat vaa-
kumit.
Segmentide Z-mootorina kasutatakse lineaarmootorit koos lineaarse nihkemõõtmissüsteemiga,
mis tagab äärmiselt suure täpsuse. Haaramis- ja ladumisasendis nihutab Z-ajam segmente verti-
kaalsuunas üles või alla.

3 Tehnilised andmed ja sõlmed Kasutusjuhend SIPLACE X-Seeria
3.5 Ladumispea Alates tarkvaraversioonist 710.0 Väljaanne 12/2016
140
3.5.3.2 SIPLACE SpeedStar (C&P20 P) tehnilised andmed
3
SIPLACE SpeedStar (C&P20 P)
Komponendikaameraga, tüüp
23
Komponendikaameraga, tüüp
41
Komponendisortiment
*a
01005 kuni 2220, Melf, SOT, SOD 0201 (meetersüsteem) kuni 2220,
Melf, SOT, SOD, Bare-Die, Flip-
Chip
Komponentide omadused
Max kõrgus
Min viigusamm
Min viigulaius
Min viigulaba samm
Min viigulaba läbimõõt
Min mõõtmed
Max mõõtmed
Max kaal
4 mm
0,25 mm
0,1 mm
0,4 mm
0,2 mm
0,18 mm x 0,18 mm
6 mm x 6 mm
1 g
4 mm
0,08 mm
0,03 mm
0,10 mm
0,05 mm
0,12 mm x 0,12 mm
6x 6 mm
1 g
Programmeeritav paigaldusjõud 1,3-4,5 N 1,3-4,5 N
Imiotsakute tüübid 40xx 40xx
X/Y-suunaline täpsus
*b
± 36 µm/3σ
± 48 µm/4σ
± 36 µm/3σ
± 25 µm / 3σ HPF-ga
*c
± 48 µm/4σ
Nurktäpsus ± 0,5° / 3σ ± 0,5° / 3σ
Valgustustase 5 5
Valgustustaseme võimalikud seaded 256
5
256
5
*)a Palun pidage silmas, et laotamisvõimelist komponendisortimenti mõjutavad ka plokkide geomeetrilised andmed, klien-
dispetsiifilised standardid, komponentide ladumistolerantsid ja komponendi tolerantsid.
*)b SIPLACE jõudlustesti väärtus mõõdetakse masina vastuvõtutestide käigus. See vastab tingimustele, mis on määratud
kindlaks SIPLACE teenindus- ja tarnetingimustes.
*)c Ainult SIPLACE X4 S microni / X4i S microni jaoksHPF = High Precision Flag
Kasutusjuhend SIPLACE X-Seeria 3 Tehnilised andmed ja sõlmed
Alates tarkvaraversioonist 710.0 Väljaanne 12/2016 3.5 Ladumispea
141
3.5.4 Komponentide praagikarbi sensor
Komponentide praagikarbi sensoriga jälgitakse praagikarbi õiget paigaldust kinnitusse.
– Kui komponentide praagikarp pole õigesti paigaldatud, siis ei saa masinat käivitada.
– Kui komponentide praagikarp hüppab ladumisprotsessi käigus kinnitusest välja, siis seiskub
masin koheselt tööpea kokkupõrke vältimiseks.
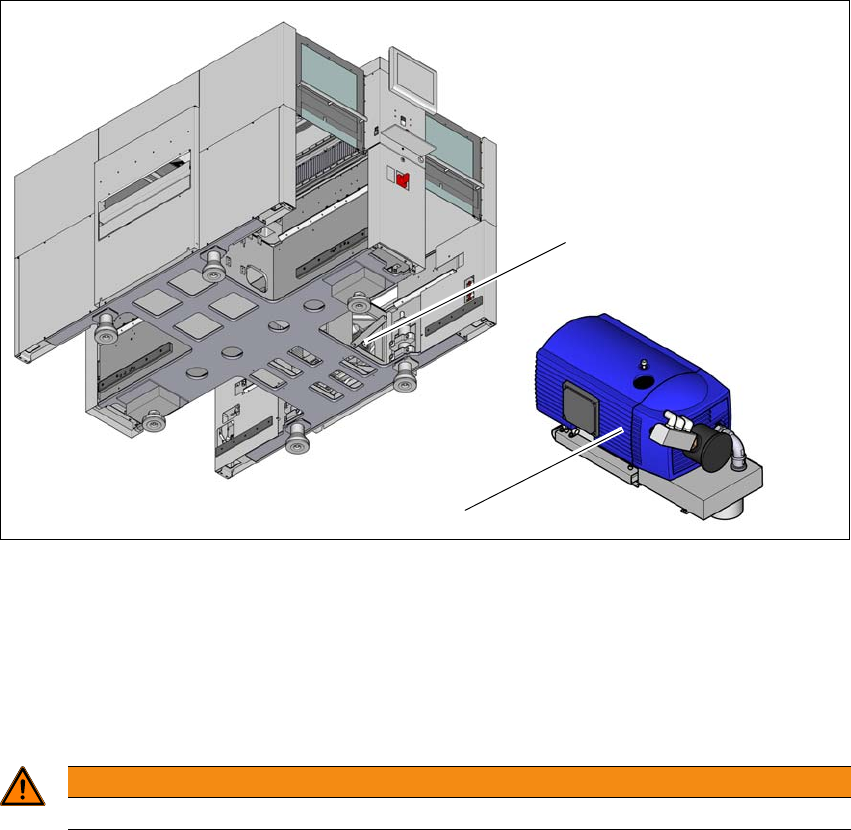
3.5.5 Vaakumpump
3.5.5.1 Ülevaade
Vaakumpumbad on paigutatud COT-osade taha masina aluse punktides 1 ja 4.
3
Jn 3.5 - 6 Ülevaade - ilma vaakumpumbata
(1) Vaakumpumba paigalduskoht
(2) Vaakumpump
3.5.5.2 Vaakumpumpade ohutusjuhised
3
(1)
(2)
HOIATUS
Järgige tarnitud kasutusjuhendis avaldatud ohutusnõudeid.