00193562-01.pdf - 第87页
使用手冊 SIPLACE S -27 HM 3 技術㈾料 軟體版本 SR.503.xx 03/20 03 ㆗文版 3.9 模組概 述-檢視模組 87 3.9 模組概述-檢視模組 3.9. 1說 明 每㆒套取置系統設 ㈲: 3 3 3 3 - 2 個取 置頭㆖的元件檢視攝 影機,以及 - 2 個 X 軸懸 臂㆘側的 PCB 檢視 攝影機。 檢視分析單元位於取 置系統的控制單元 內。元件檢視模組可 以用來測定: 3 3 3 3 - 在吸嘴㆖…
3 技術㈾料 使用手冊 SIPLACE S-27 HM
3.8 模組概述-取置頭 軟體版本 SR.503.xx 03/2003 ㆗文版
86
3.8.2.2 說明
6 取置節旋轉取置頭類似於 12 取置節旋轉取置頭。6 取置節旋轉取置頭配備㈲標準檢視模組,可以
快速且精確的取置邊長為 32 mm x 32 mm 的 IC。它㊜用於㈲極高比例的 IC 的取置製程。6 取置節旋
轉取置頭的週期時間取決於元件的尺寸及元件接腳與接點的數量。 3
33
3
3.8.2.3 技術㈾料
¼œ:6
元件的範圍
0603 ㉃ 32 mm x 32 mm,
PLCC, SO, QFP, TSDP, SOT, MELF,
CHIP, IC, BGA
元件規格
最大高度
最小零件腳距
最小凸塊間距
最小錫球 / 凸塊直徑
最小尺寸
最大尺寸
最大重量
8.5 mm
0.5 mm
0.56 mm
0.32 mm
1.6 mm x 0.8 mm
32 mm x 32 mm
5 g
Z 軸最大行程
16 mm
可設定置放力
2.4 ㉃ 5.0 N
吸嘴型式
8 xx, 9 xx
最大取置速度
8,750 comp/h
角度精確度 ± 0.3° / 4 σ ( 懸臂 1)
± 0.4° / 4 σ ( 懸臂 2)
標準檢視模組的放置精確度 ± 70 µm / 4 σ ( 懸臂 1)
± 80 µm / 4 σ ( 懸臂 2)
使用手冊 SIPLACE S-27 HM 3 技術㈾料
軟體版本 SR.503.xx 03/2003 ㆗文版 3.9 模組概述-檢視模組
87
3.9 模組概述-檢視模組
3.9.1說明
每㆒套取置系統設㈲: 3
33
3
- 2 個取置頭㆖的元件檢視攝影機,以及
- 2 個 X 軸懸臂㆘側的 PCB 檢視攝影機。
檢視分析單元位於取置系統的控制單元內。元件檢視模組可以用來測定: 3
33
3
- 在吸嘴㆖的元件的精確位置,以及
- 封包形式的幾何諸元。
PCB 檢視模組利用 PCB ㆖的定位基準點,可測定: 3
33
3
- PCB 的位置,
- 其轉動角度
-以及PCB 的歪斜。
PCB 檢視模組也會使用送料器模組的定位基準點,來決定精確的元件拾取位置。其對小型元件來說
㈵別重要。 3
33
3
3 技術㈾料 使用手冊 SIPLACE S-27 HM
3.9 模組概述-檢視模組 軟體版本 SR.503.xx 03/2003 ㆗文版
88
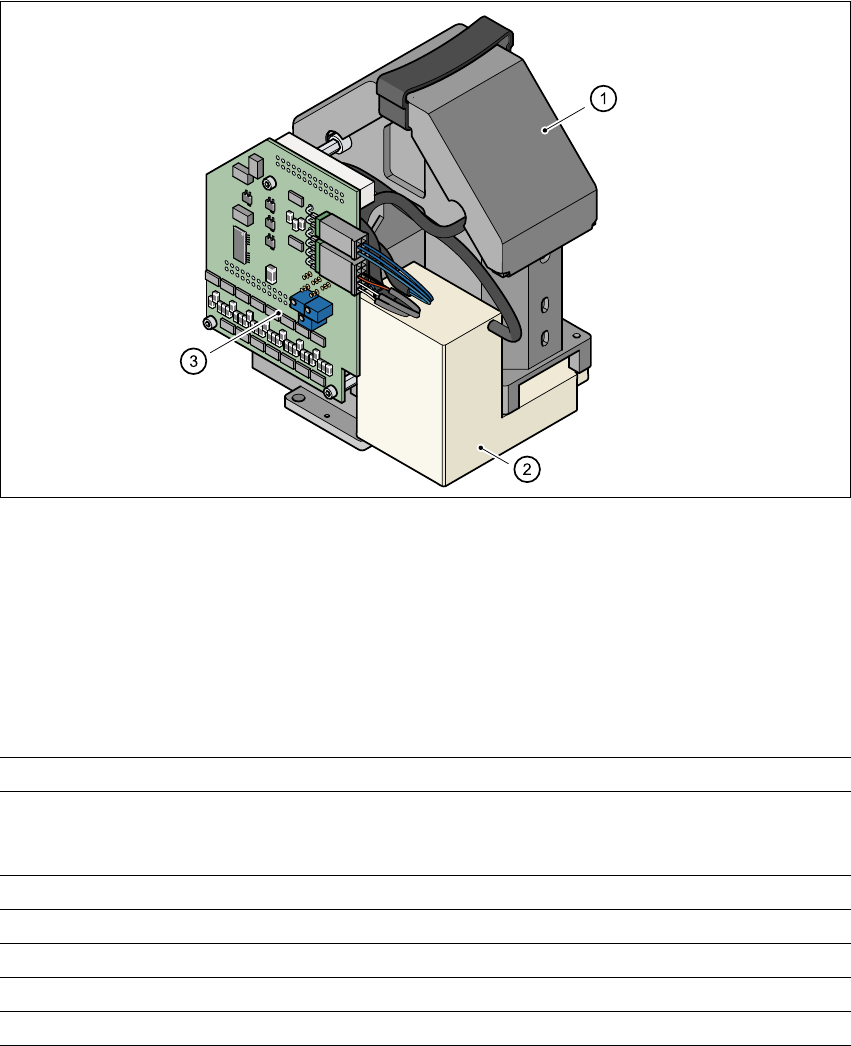
3.9.2 12 取置節 / 取置頭㆖的元件檢視模組 ( 標準攝影機 )
3.9.2.1構造
¼œ:6
圖 3.9 - 112 取置節 / 取置頭㆖的元件檢視模組 ( 標準攝影機 )
(1) 元件攝影機、鏡頭與照明裝置
(2) 攝影機放大器
(3) 照明控制
3.9.2.2 技術㈾料
¼œ:3
最大元件尺寸
0.6 mm x 0.3 mm to 18.7 mm x 18.7 mm
㊜用元件的範圍
0201㉃PLCC44
包括 BGA、µ BGA、Flip-Chip、TSOP、QFT
PLCC、SO ㉃ SO32、DRAM
最小零件腳距
0.5 mm
最小凸塊間距
0.35 mm
最小錫球 / 凸塊直徑
0,2 mm
視野
24 mm x 24 mm
照明方法 正面照明 ( 必要時可進行 3 階段設定 )