CM101 参考手册.pdf - 第136页
CM101-D 参考手册 2.4 机器调整 Pa ge 2- 42 2.4.9 轴信息 本机可以对所控制的所 有轴的当前位置和状态进行 确认。 ∗ 画面为高速吸头 (12 吸嘴 ) 。 1. 在机器调整的菜单画面上按 [ 轴信息 ] 。 • 将显示轴信息的画面。 • 画面项目内容如下所示 。 a. [ 当前位置计数 ] 用状态地址的 mm 或者脉冲来显示各轴的当前 位置。 • [ 脉冲 ] 用脉冲显示当前位置。 • [mm] 用 mm …
CM101-D
参考手册
2.4
机器调整
Page 2-41
2.4.8
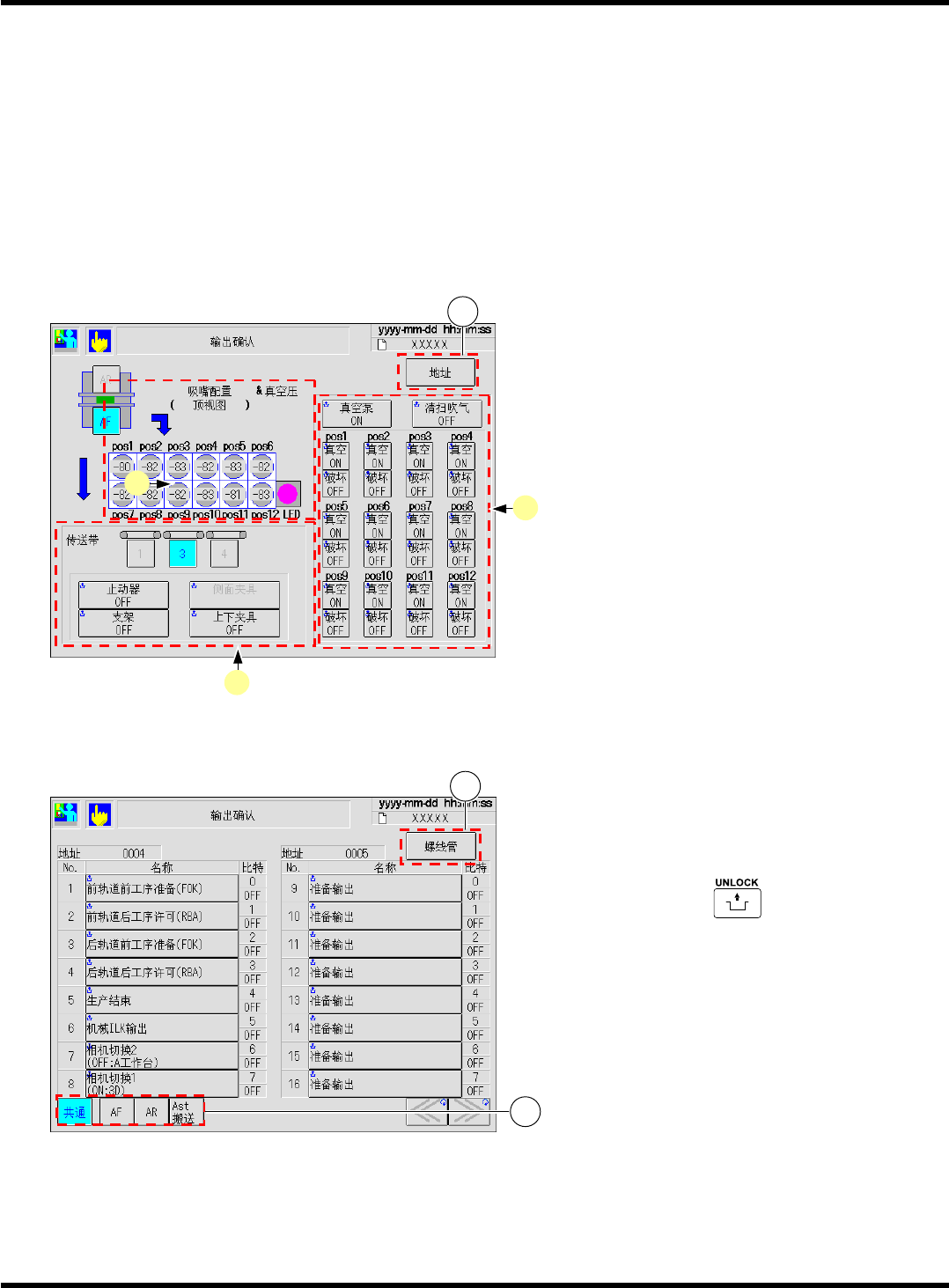
输出确认
可以对调整时频繁使用的阀的状态进行确认,并且使其各自单独动作。
∗
每按一次画面右上的按钮
,信息的显示在螺线管显示和地址显示之间切换。按钮内的显示也会
变化。
1.
在机器调整的菜单画面上按
[
输出确认
]
。
•
将显示输出确认的画面。
•
画面项目内容如下所示。
螺线管显示
•
画面为高速吸头
(12
吸嘴
)
。
a.
吸嘴
使真空泵、强制吹气、真空、贴装吹气的各阀动
作。
b.
传送带
使基板支座的止动器、支架、侧面夹具、上下夹
具动作。
还有如果使支架动作时,会在支架按钮的侧面以
秒为单位显示此动作时间。
c. ‘
吸嘴配置
&
真空压
’
抽样显示各吸嘴位置的真空压值。
按地址显示
•
本机每隔
1
秒钟对使用的输出地址的状态用比
特加上名称来显示。
按钮的反转表示该比特为
ON (1)
。
∗
按下操作面板的
的状态下,按
‘
名称
’
按钮时,输出与当前状态相反的信号,并再次
显示。
∗
选择要显示的大项目
,请通过翻页来确认必
要的输出比特。
EJM5B-Ma-0005
1
a
c
b
EJM5B-Ma-0010
2
1
EJM5B-C-RMC02-A02-00
CM101-D
参考手册
2.4
机器调整
Page 2-42
2.4.9
轴信息
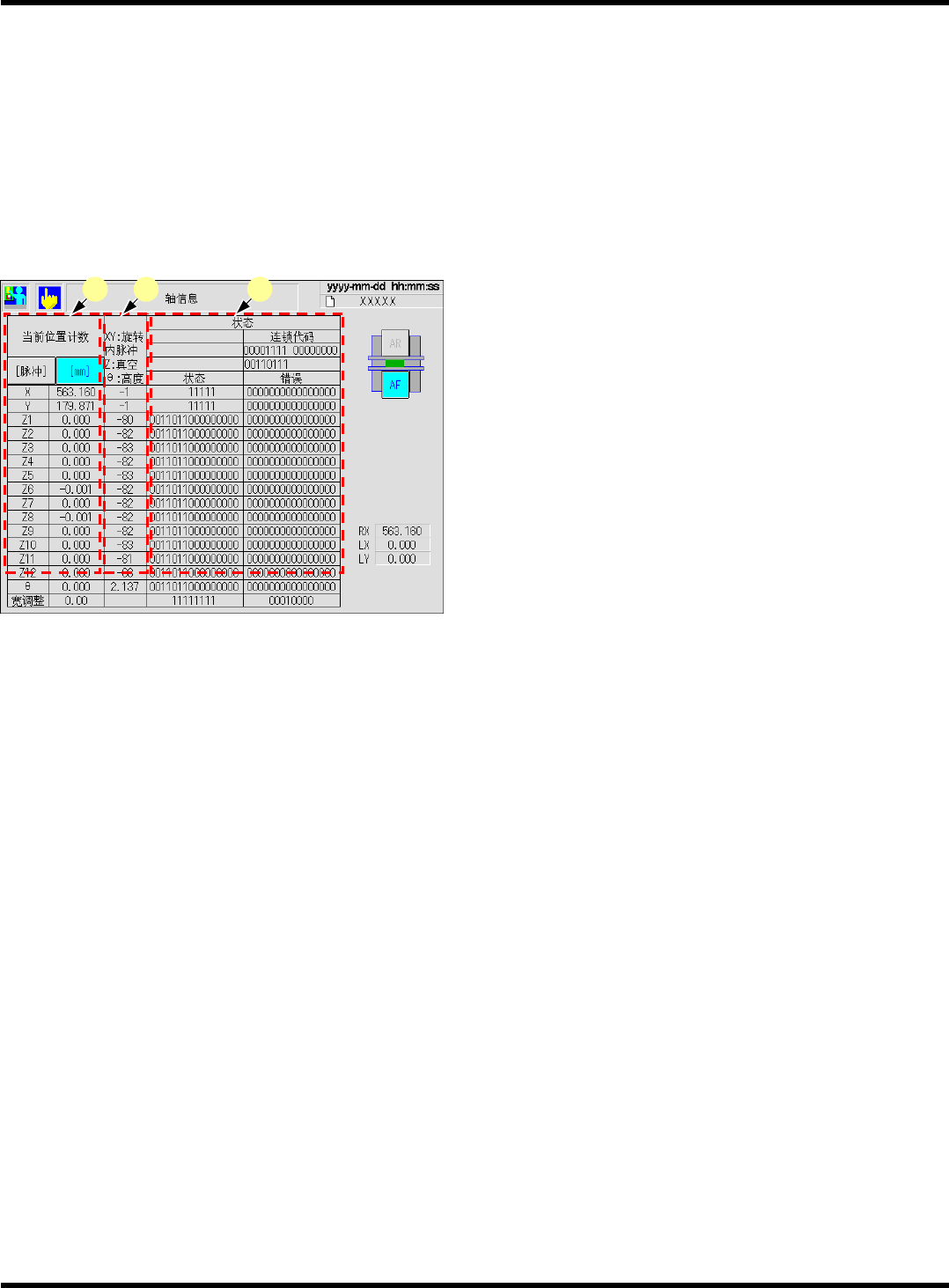
本机可以对所控制的所有轴的当前位置和状态进行确认。
∗
画面为高速吸头
(12
吸嘴
)
。
1.
在机器调整的菜单画面上按
[
轴信息
]
。
•
将显示轴信息的画面。
•
画面项目内容如下所示。
a. [
当前位置计数
]
用状态地址的
mm
或者脉冲来显示各轴的当前
位置。
•
[
脉冲
]
用脉冲显示当前位置。
•
[mm]
用
mm
显示当前位置。
b. [XY:
旋转内脉冲
]
仅对
X
轴、
Y
轴的数据以抽样显示。
•
[Z:
真空
]
以抽样显示
Z
轴的真空压力数据。
•
[
θ
:
高度
]
以抽样显示高度测量传感器的数据。
(
高度测量传感器为选购件。
)
c. [
状态
]
各轴的错误、状态地址的状态以比特来显示。
在画面上使用的简字说明
X : XY
装置的
X
轴
Y : XY
装置的
Y
轴
Z1 ~ Z12 : Z
轴
(
高速吸头
(12
吸嘴
)
时
)
Z1 ~ Z8
为通用吸头
(8
吸嘴
)
时
Z1 ~ Z3
为多功能吸头
(3
吸嘴
)
时
θ
:
θ
轴
EJM5B-Ma-0006
a b c
EJM5B-C-RMC02-A02-00
CM101-D
参考手册
2.4
机器调整
Page 2-43
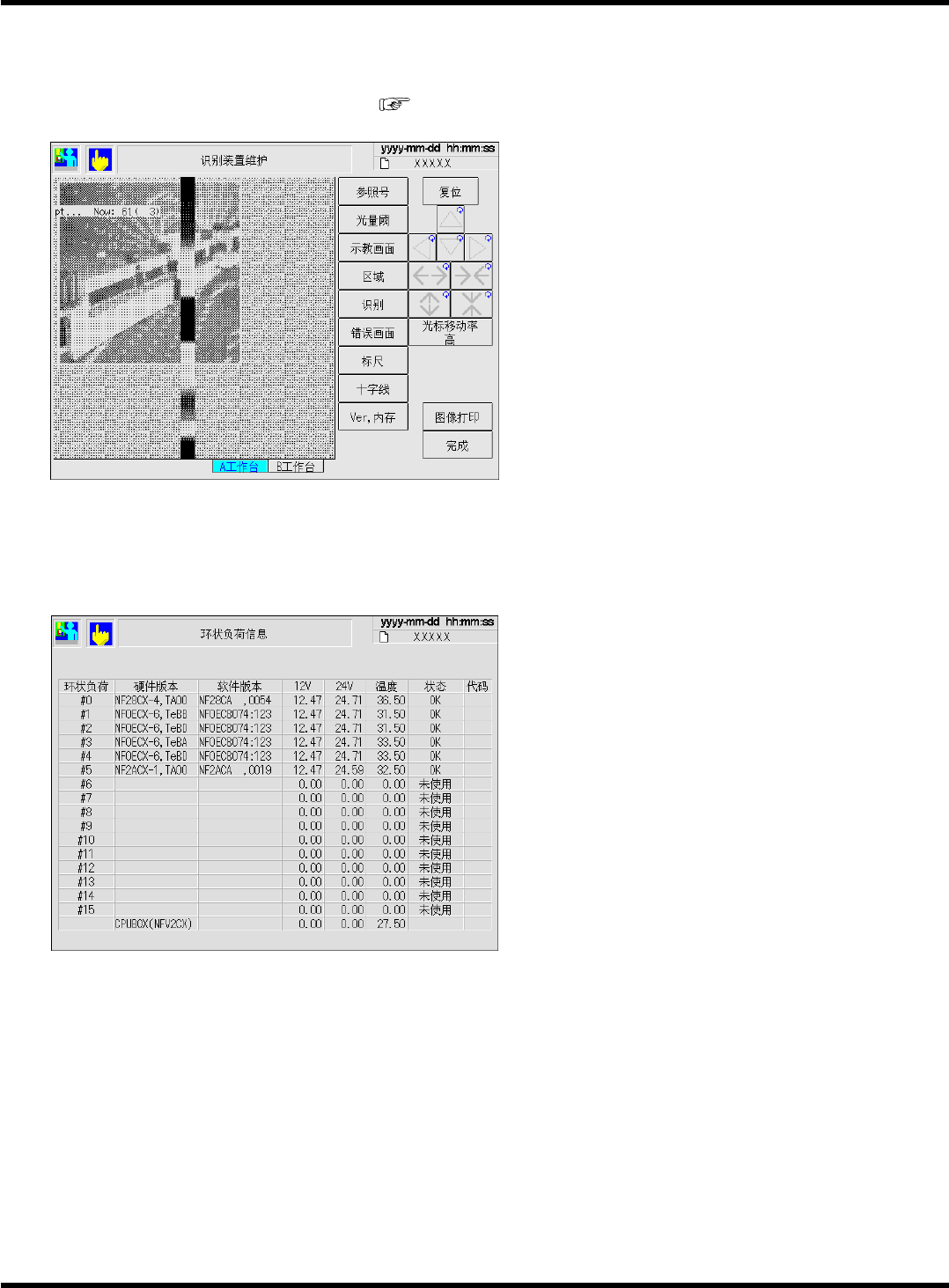
2.4.10
识别装置维修
可以确认所有的识别处理动作。
∗
关于操作方法,请参照
程序手册
“
附录
1.
识别装置
(HGR-40)”
。
1.
在机器调整的菜单画面上按
[
识别装置维
护
]
。
•
将显示识别装置维护的画面。
2.4.11
环状负荷信息
显示加载在环状上的负荷信息。
1.
在机器调整的菜单画面上按
[
环状负荷信
息
]
。
•
将显示环状负荷信息的画面。
•
画面项目内容如下所示。
各环状的板对应于以下各处。
#1, #2 ..........
工作台前
#3, #4 ..........
工作台后
#5 ................
工作台搬送
EJM5B-Ma-0007
EJM5B-C-RMC02-A02-00
EJM4A-Ma-0011