00194081-01.pdf - 第91页
User Manual SIPLAC E CF 3 Technical data Software Vers ion SR.408.xx 03/2006 US Ed ition 3.8 P lacement heads 91 3.8.2.2 Descriptio n of the Pick&Pla ce head The Pick & Place head wor ks on the Pick&Pl ace pr…
3 Technical data User Manual SIPLACE CF
3.8 Placement heads Software Version SR.408.xx 03/2006 US Edition
90
3.8.2 Pick&Place head
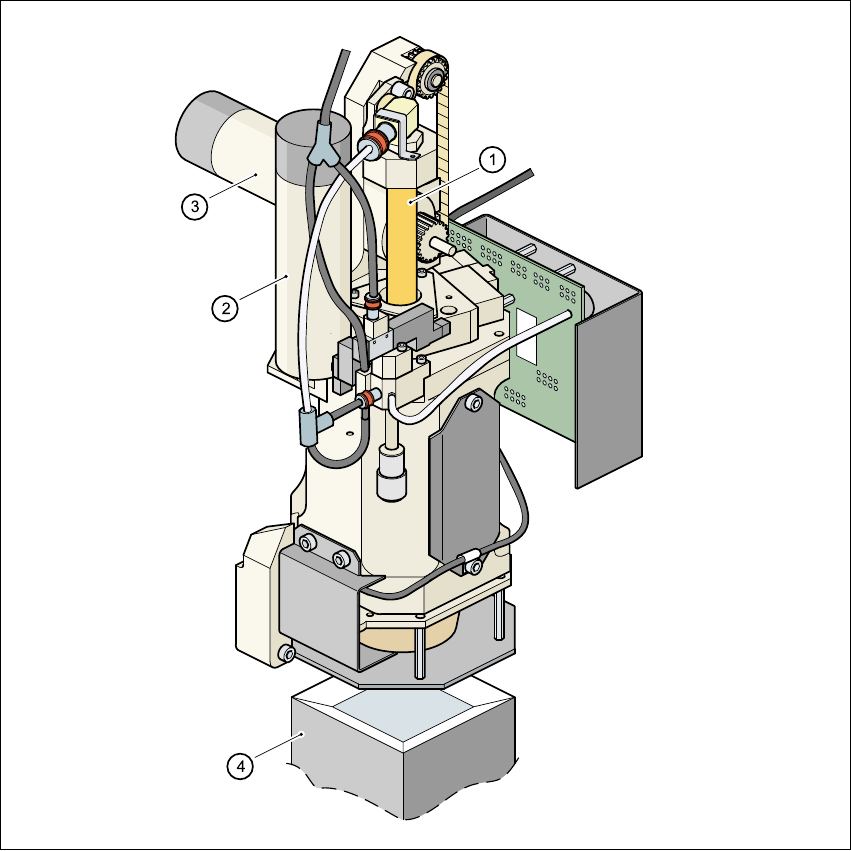
3.8.2.1 Structure
3
Fig. 3.8 - 3 Structure of the Pick&Place head
3
(1) Sleeve
(2) DR axis drive
(3) Z axis drive
(4) Fine-pitch camera
User Manual SIPLACE CF 3 Technical data
Software Version SR.408.xx 03/2006 US Edition 3.8 Placement heads
91
3.8.2.2 Description of the Pick&Place head
The Pick& Place head works on the Pick&Place principle. According to this principle, a compo-
nent is picked up by the nozzle with the aid of a vacuum. It is then optically centered by the fine-
pitch vision module, turned in the placement angle and placed on the PCB with high precision.
The Pick&Place head offers particularly high angular accuracy.
3.8.2.3 Technical data - Pick&Place head
3
Range of components
PLCC, LCCC, QFP, SO, BGA, flip-chip,
components with connectors up to 55 mm x 55 mm
(J leads and gull-wings, balls, bumps)
Component specification
Max. height Component height ≤ 13.5mm- PCB thickness
- PCB warpage
Option:
Component height ≤ 20mm- PCB thickness
- PCB warpage
Min. lead pitch 0.4 mm
Min. bump pitch 0.56 mm
Min. ball/bump diameter 0.32 mm
Min. dimensions 1.6 mm x 0.8 mm
Max. dimensions 55 mm x 55 mm (92 mm edge length available upon request)
Max. weight 25 g
Programmable placement force 1 - 10 N
Component centering Fine pitch camera
up to 32 mm x 32 mm with single measurement
up to 55 mm x 55 mm with quadruple measurement
Max. placement rate 1,800 comp/h
Nozzle types 4xx, 5 standard nozzles with nozzle changer
Angular accuracy ± 0.05° / 3σ ± 0.07° / 4σ
Placement accuracy ± 38 µm / 3σ ± 50 µm / 4σ
3 Technical data User Manual SIPLACE CF
3.9 Vision modules Software Version SR.408.xx 03/2006 US Edition
92
3.9 Vision modules
3.9.1 Description
Each placement system has
– one component vision module on the 6-segment Collect&Place head,
– one fine pitch vision camera on the machine base and
– one PCB vision module on the underside of the X axis gantry.
The vision analysis unit is located in the control unit for the placement system. The component
vision module is used to determine:
– the precise position of the components at the nozzle and
– the geometry of the package form.
The PCB vision module uses fiducials on the PCBs to determine:
– the position of the PCB,
– its rotation angle
– and the PCB skew.
The PCB vision module also uses fiducials on the feeders to determine the exact pick-up position
of components. This is particularly important for small components.